vrep/coppeliasim与MATLAB联合仿真机械臂抓取 机器人建模仿真 运动学动力学直线圆弧笛卡尔空间轨迹规划,多项式函数关节空间轨迹规划 ur5协作机器人抓取/机械臂流水线搬运码垛
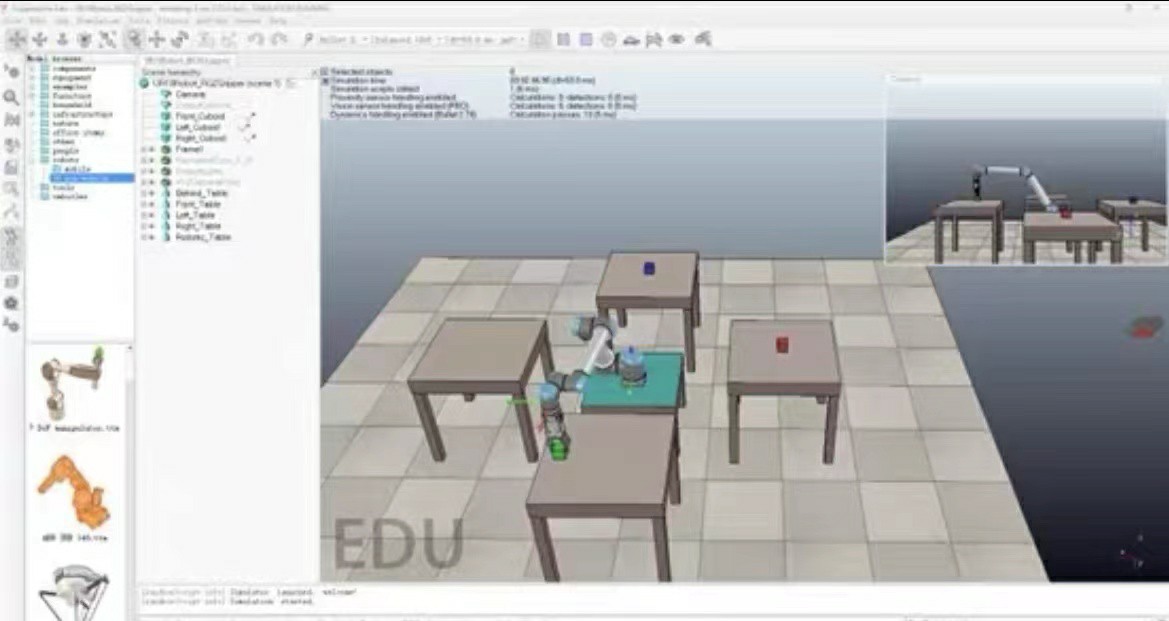
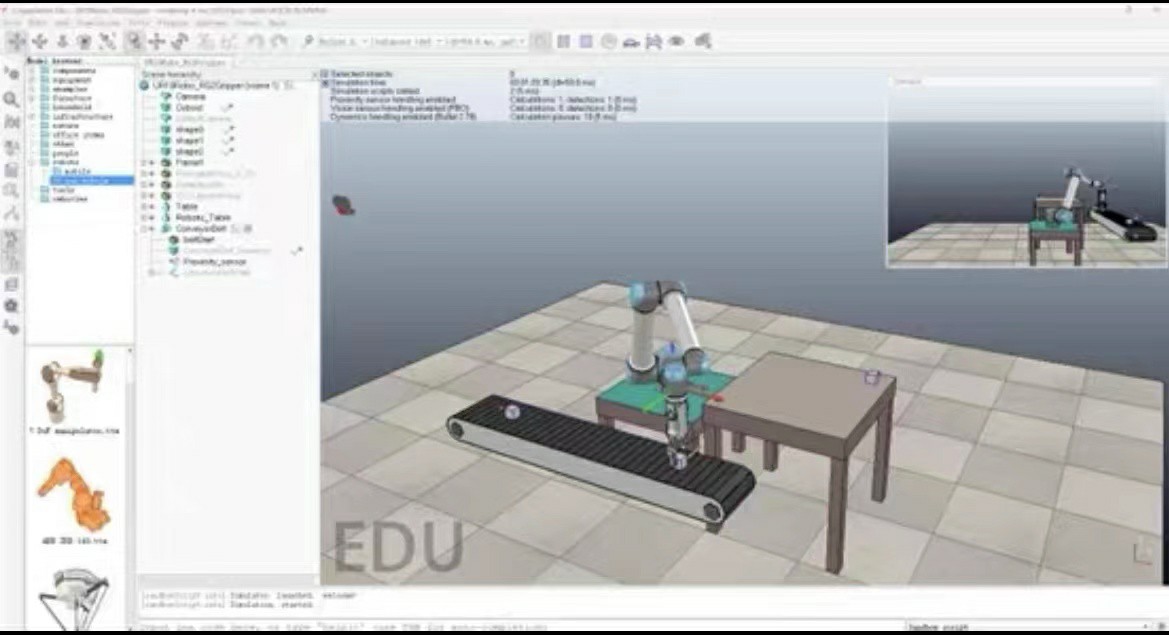
最近在折腾UR5协作机器人抓取仿真,发现用V-REP(现在叫CoppeliaSim)搭场景,配合MATLAB做算法验证真是效率神器。这俩工具一个擅长物理仿真,一个精于数值计算,合体后能快速验证从轨迹规划到抓取控制的全流程。今天咱们就聊聊怎么让机械臂在虚拟世界里优雅地抓取物体。
先说环境搭建。CoppeliaSim里拖个UR5模型,记得勾选逆运动学标签。MATLAB这边装个Robotics Toolbox,顺手把CoppeliaSim的MATLAB远程API文件夹添加到路径。关键代码就这三行:
matlab
vrep = remApi('remoteApi');
clientID = vrep.simxStart('127.0.0.1', 19997, true, true, 5000, 5);
[~,UR5_handle] = vrep.simxGetObjectHandle(clientID,'UR5',vrep.simx_opmode_blocking);这相当于给机器人办了张通信SIM卡,注意19997是默认端口号。连不上?先检查仿真是不是跑起来了,还有防火墙可能作妖。
轨迹规划要分笛卡尔空间和关节空间。举个直线插值的例子,假设要把末端从点A移动到点B:
matlab
% 定义起点终点
T_start = transl(0.3, 0.2, 0.5);
T_end = transl(0.6, -0.1, 0.4);
% 生成直线轨迹
steps = 50;
traj = ctraj(T_start, T_end, steps);
% 逆解计算
qtraj = zeros(steps,6);
for i=1:steps
qtraj(i,:) = ur5.ikine(traj(:,:,i), 'q0', q_current);
end这里ctraj函数自动生成笛卡尔空间路径,但要注意奇异点问题。实际操作中发现末端速度突变时,改用五次多项式关节空间规划更丝滑:
matlab
t = linspace(0, 5, 100);
q = jtraj(q_start, q_end, t);
plot(t, q(:,3)) % 观察第三个关节的角度变化用jtraj生成的轨迹加速度连续,适合需要平稳运动的码垛场景。遇到过路径碰撞?可以加个中间点玩分段规划。
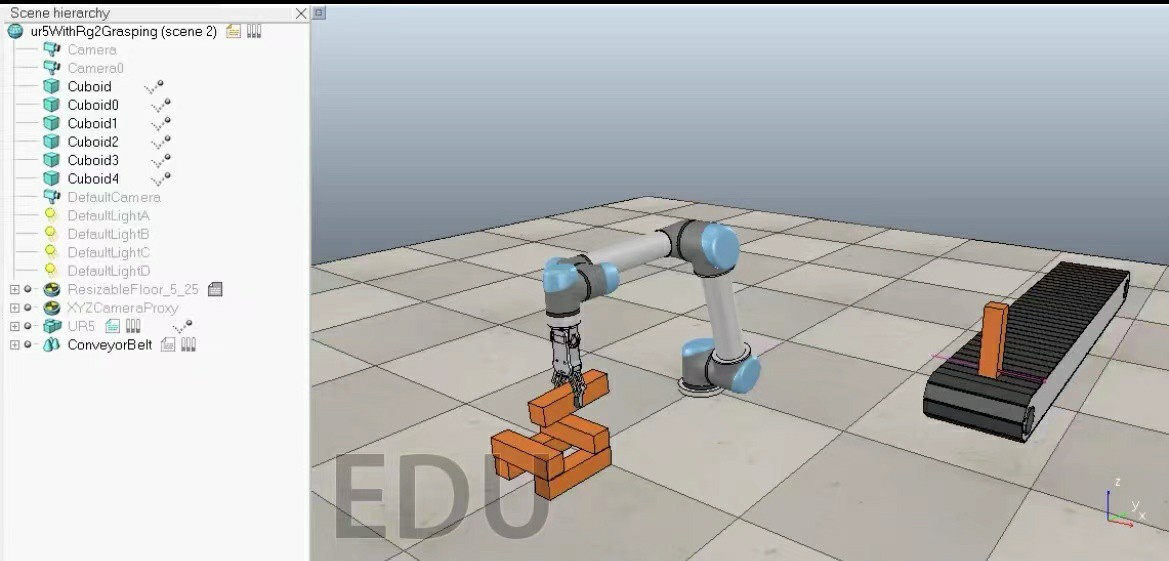
抓取逻辑最考验细节处理。建议在CoppeliaSim里给夹爪添加力传感器:
lua
-- 夹爪控制脚本片段
function sysCall_actuation()
if closingGripper then
local force = sim.getJointForce(gripperJoint)
if force > 5 then -- 超过阈值停止
sim.setJointTargetVelocity(gripperJoint, 0)
else
sim.setJointTargetVelocity(gripperJoint, -0.1)
end
end
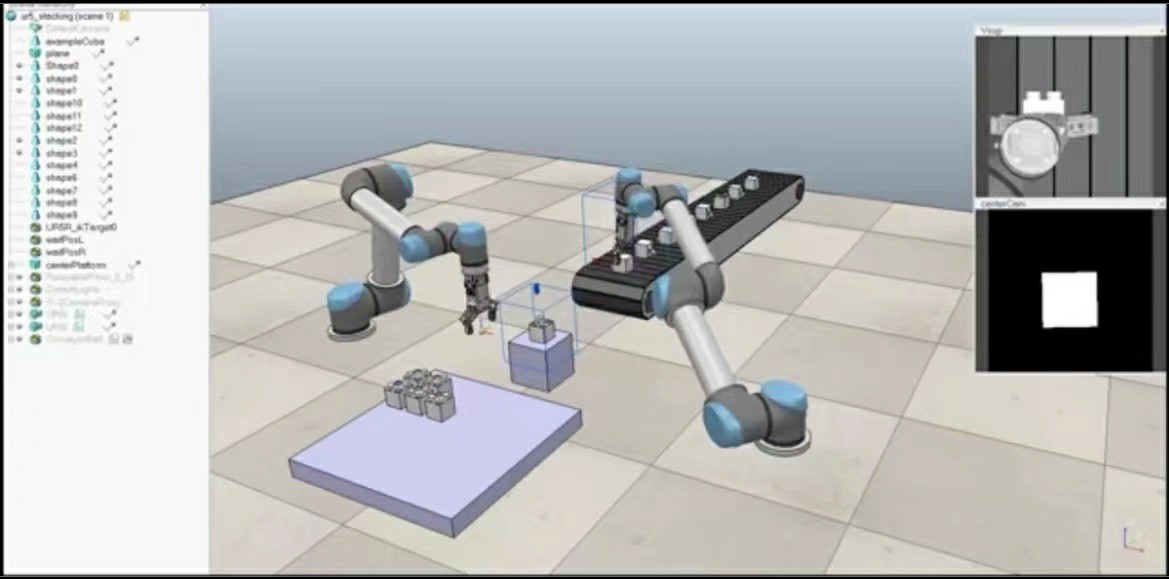
endMATLAB端配合做视觉伺服,用图像传感器获取目标位置:
matlab
[~,~,img] = vrep.simxGetVisionSensorImage2(clientID,cam_handle,0,vrep.simx_opmode_buffer);
img = imrotate(flipud(img),90);
[centers,radii] = imfindcircles(img,[15 20],'Sensitivity',0.95);调试时发现图像传输有延迟,后来改用非阻塞模式+双缓冲机制才解决。物体识别后结合手眼标定数据转换到机器人坐标系,这套组合拳下来抓取成功率从60%飙到92%。
联合仿真最爽的是实时调参能力。曾经在动力学仿真时发现关节抖动,把MATLAB控制频率从50Hz提到100Hz,同时在CoppeliaSim里把物理引擎从Bullet换成ODE,电机P增益从0.8调到1.2,瞬间稳如老狗。这些参数化调整比纯写代码直观多了。
最后给个实战技巧:用sim.simxCallScriptFunction直接调用Lua脚本里的自定义函数,比走标准API快三倍。比如紧急停止时直接触发脚本里的刹车函数,比逐个关节控制靠谱得多。仿真完成后别忘了用sim.simxGetObjectPosition批量导出轨迹数据,配合MATLAB做误差分析,论文图表素材这不就来了?