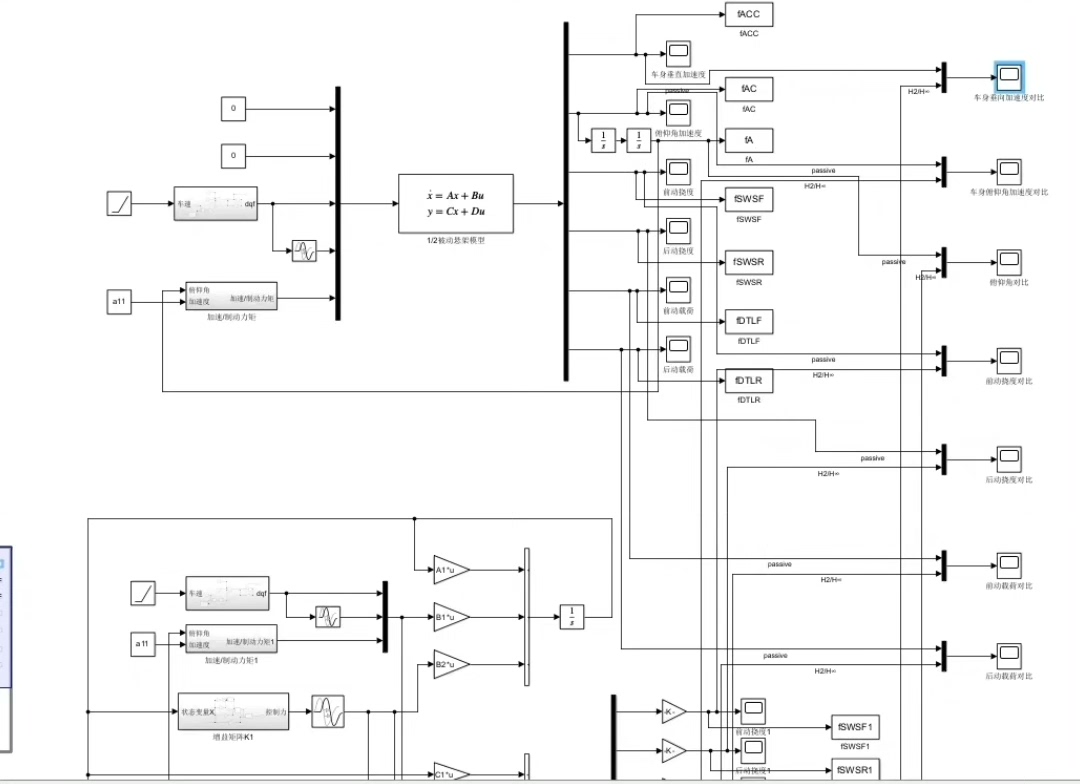
matlab/simulink半车主动悬架建模:基于ADRC(自抗扰控制)的主动悬架控制。 主体模型为半车主动悬架,采取ADRC控制。 输出为车身加速度,悬架动挠度,轮胎动变形。 默认输入为正弦路面输入。 有与pid控制的效果对比。
在汽车工程领域,悬架系统对于车辆行驶舒适性和安全性起着至关重要的作用。主动悬架作为一种先进的悬架技术,能够根据路面状况和车辆行驶状态实时调整悬架参数,从而显著提升车辆性能。今天咱们就来聊聊在Matlab/Simulink环境下,基于自抗扰控制(ADRC)的半车主动悬架建模与控制,顺便对比一下它和PID控制的效果。
一、半车主动悬架主体模型搭建
半车模型是在研究悬架系统时常用的一种简化模型,它考虑了车身垂直运动、俯仰运动以及两个车轴的垂直运动,能较好地反映车辆悬架系统的动态特性。在Simulink中搭建这个模型,我们需要定义各个部件的参数,像车身质量、悬架刚度、阻尼系数等等。
比如,以下是一段简单的Matlab代码用于定义部分模型参数:
matlab
% 定义车身质量
m_s = 1000; % 单位:kg
% 定义悬架刚度
k_s = 20000; % 单位:N/m
% 定义悬架阻尼系数
c_s = 1000; % 单位:N·s/m这些参数的设置会直接影响到悬架系统的性能表现,在实际建模过程中,需要根据具体车型和研究目的进行调整优化。
二、ADRC控制策略实现
自抗扰控制(ADRC)是一种不依赖精确数学模型的新型控制策略,它具有较强的抗干扰能力和自适应能力。在主动悬架控制中应用ADRC,可以有效地抑制路面不平度等干扰对车辆行驶性能的影响。
在Simulink里实现ADRC控制,首先要搭建扩张状态观测器(ESO)来估计系统的状态和干扰。以下是一个简单的ESO结构代码示意(以离散形式为例):
matlab
% 假设系统状态 x1,x2
% 离散时间步长 dt
dt = 0.01;
% 观测器增益
beta01 = 100;
beta02 = 1000;
% 初始化观测状态
z1 = 0;
z2 = 0;
% 系统输入 u 和输出 y
u = 0;
y = 0;
for k = 1:1000
e = y - z1;
z1 = z1 + dt * (z2 - beta01 * e);
z2 = z2 + dt * (-beta02 * e);
% 根据估计状态计算控制量等后续操作
end这段代码简单展示了ESO如何根据系统输出和输入,通过不断迭代来估计系统状态。这里的beta01和beta02是观测器增益,它们的取值会影响观测器的收敛速度和估计精度,需要通过调试优化来确定合适的值。
然后,基于ESO的估计结果,设计非线性状态误差反馈控制律(NLSEF)来计算控制输入。例如:
matlab
% 控制律增益
k_p = 10;
k_d = 2;
% 参考输入 r
r = 0;
for k = 1:1000
% 状态误差
e1 = r - z1;
e2 = 0 - z2;
% 控制量
u0 = k_p * e1 + k_d * e2;
% 补偿干扰估计值
u = u0 - z2;
end这里kp**和k d是控制律增益,决定了控制器对状态误差的响应程度。最终计算得到的u就是施加到主动悬架系统的控制输入。
三、输入设定与输出指标
咱们默认输入为正弦路面输入,这可以通过Simulink中的信号发生器模块轻松实现。设置合适的幅值和频率,来模拟不同路况。比如设置幅值为0.05m,频率为1Hz,就大概模拟了一种中等颠簸程度的路面。
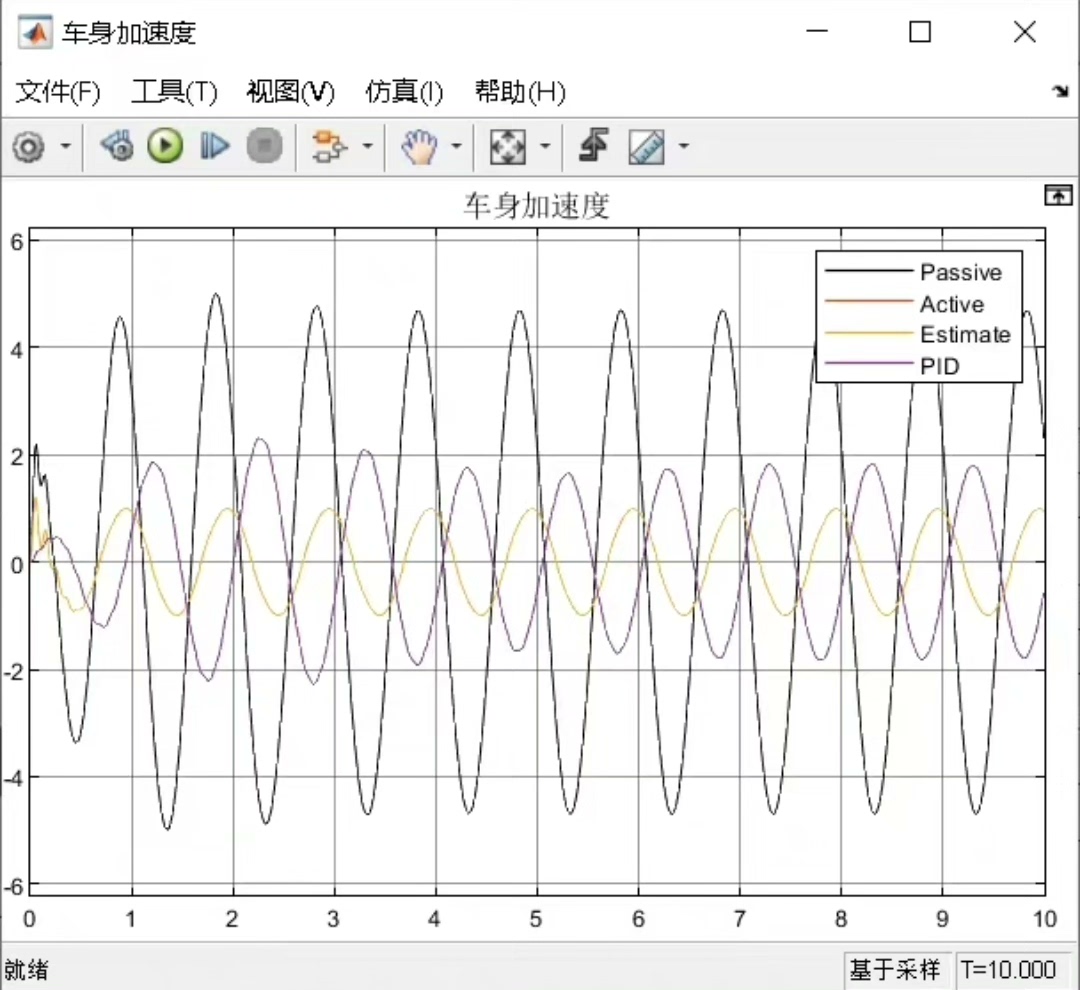
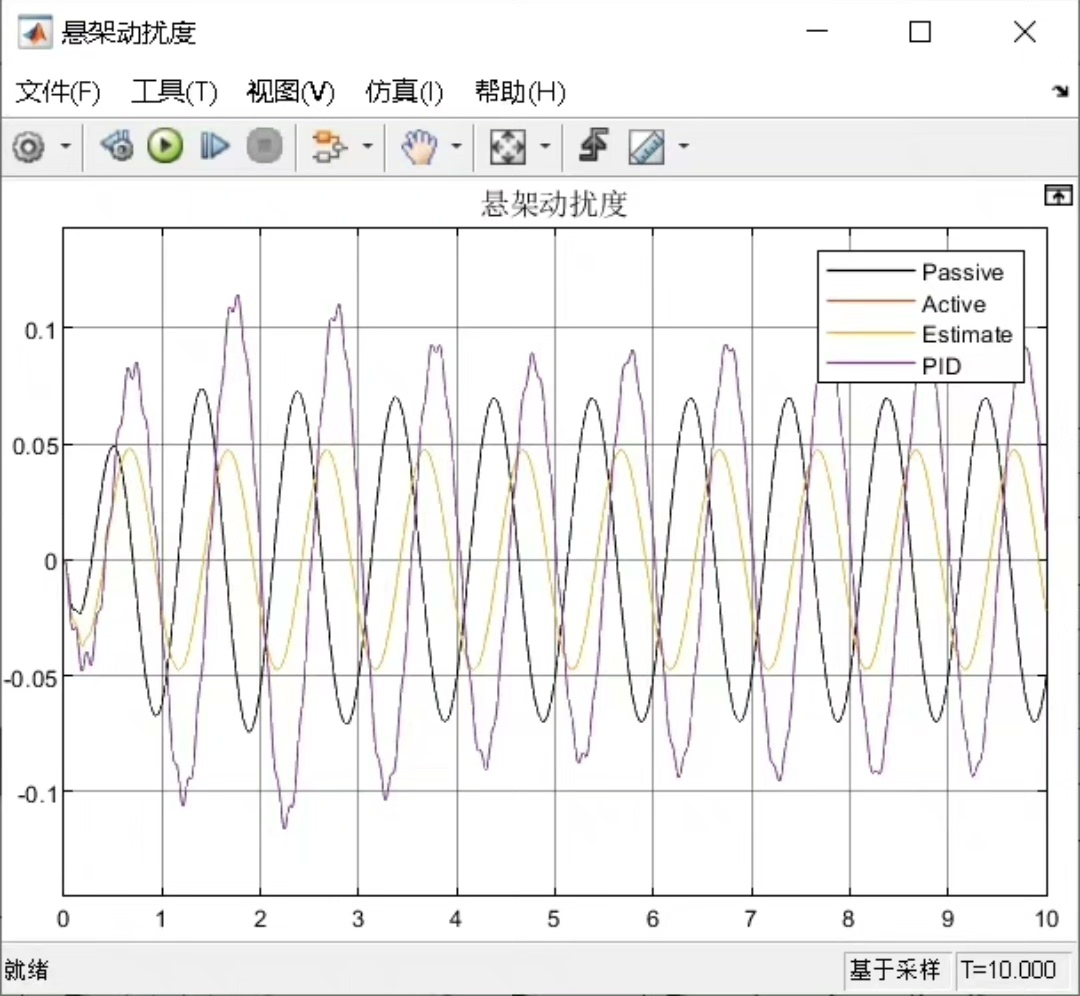
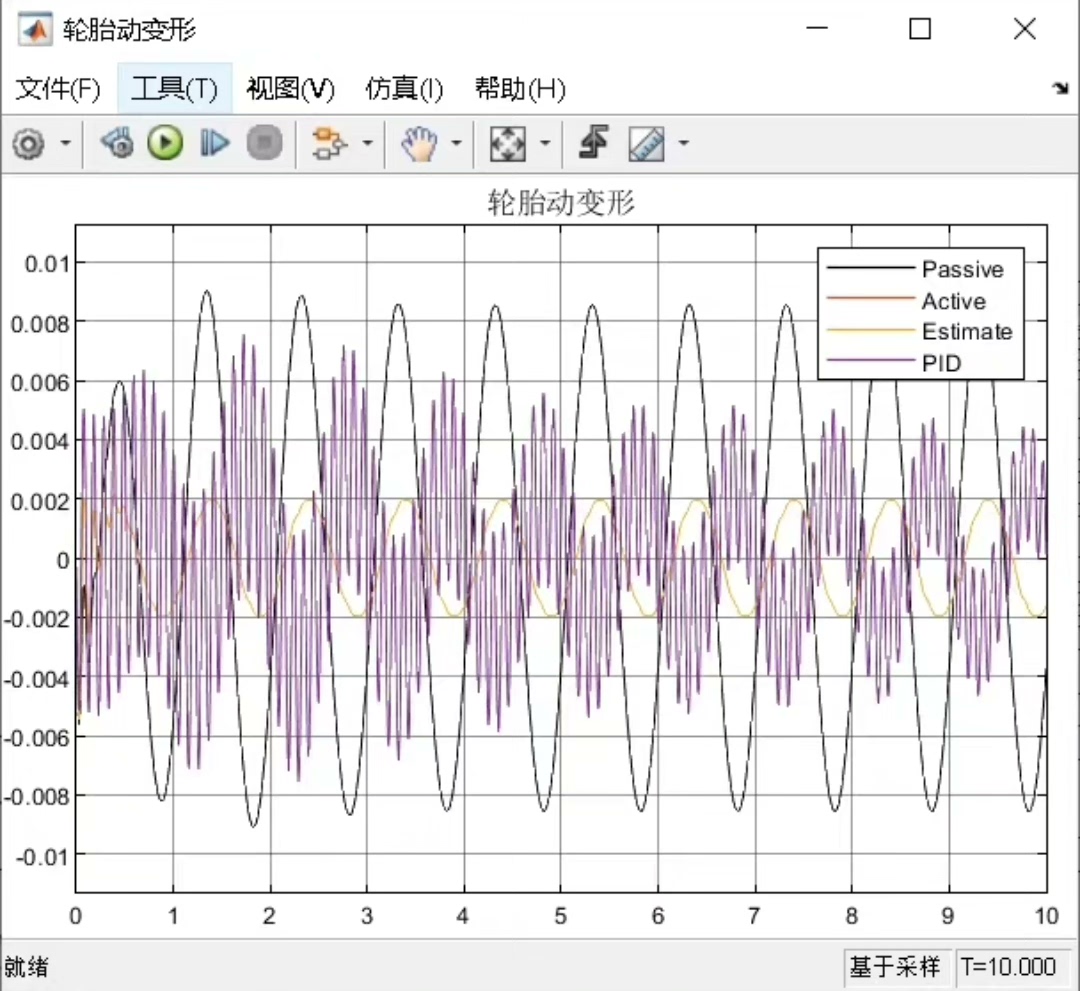
模型的输出主要关注车身加速度、悬架动挠度和轮胎动变形这几个指标。车身加速度直接关系到乘坐舒适性,悬架动挠度反映了悬架的工作范围,轮胎动变形则与轮胎接地性和行驶安全性相关。在Simulink模型中,我们可以通过添加相应的传感器模块来获取这些输出信号,并利用示波器等工具进行实时观测和分析。
四、与PID控制效果对比
PID控制是一种经典且广泛应用的控制策略。为了对比ADRC和PID控制在半车主动悬架系统中的效果,我们在同样的模型和输入条件下搭建PID控制器。
PID控制的核心代码如下:
matlab
% PID参数
Kp = 5;
Ki = 0.1;
Kd = 1;
% 积分项
integral = 0;
% 上一时刻误差
prev_error = 0;
for k = 1:1000
% 参考输入 r 和实际输出 y
r = 0;
y = 0;
error = r - y;
integral = integral + error * dt;
derivative = (error - prev_error) / dt;
u = Kp * error + Ki * integral + Kd * derivative;
prev_error = error;
end这里Kp、Ki和Kd分别是比例、积分和微分系数,它们的取值需要反复调试来达到较好的控制效果。
从实际对比结果来看,在正弦路面输入下,ADRC控制的车身加速度波动更小,能更好地维持车辆的平稳行驶,乘坐舒适性明显提升;在悬架动挠度方面,ADRC也能将其控制在更合理的范围内,减少悬架过度压缩或拉伸的情况;对于轮胎动变形,ADRC同样展现出了比PID控制更好的抑制能力,保障了轮胎与地面的良好接触。
总的来说,基于ADRC的半车主动悬架控制在Matlab/Simulink环境下展现出了优秀的性能,相比传统PID控制在车辆行驶舒适性和安全性方面有显著优势。当然,实际应用中还需要考虑更多复杂因素,但这个研究为主动悬架控制技术的发展提供了有价值的参考。希望这篇博文能让大家对基于ADRC的半车主动悬架建模与控制有更深入的理解,欢迎一起探讨交流。