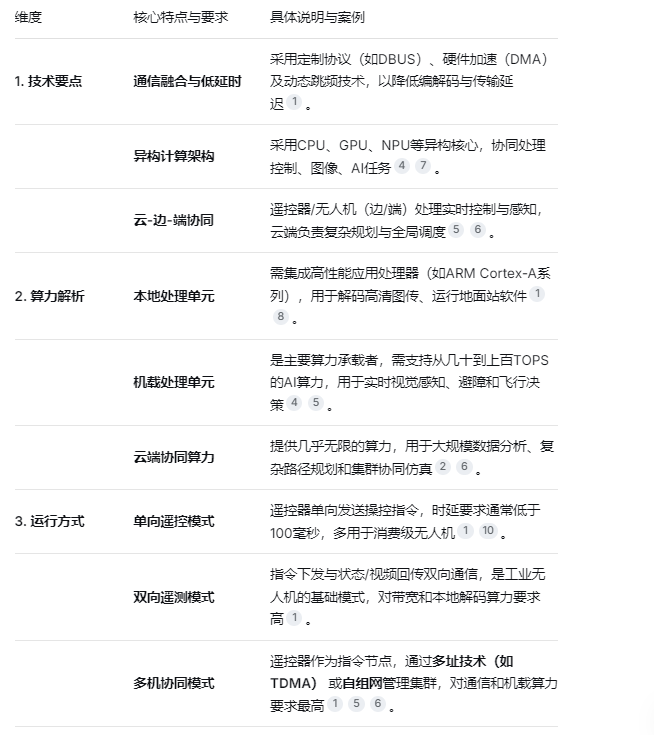
无人机遥控器的"图(高清视频)、数(遥测数据)、控(控制指令)一体"技术,其核心在于将原本分离的视频传输、数据传输和飞行控制功能深度融合与协同处理。其技术要点、算力需求和运行方式与传统遥控器有显著区别,下表梳理了关键信息:
关键技术与挑战
实现上述功能面临三大技术挑战:
通信瓶颈:在多机协同或高清视频回传时,带宽和时延是核心约束。虽然5G、OFDM等技术能缓解,但超大规模编队仍需突破。
算力与功耗平衡:机载高性能AI计算带来高功耗,直接影响续航。需通过芯片级优化(如存算一体) 和智能任务调度来平衡。
系统可靠性:需采用冗余设计(如双IMU、双频段通信)和自主应急逻辑(如链路中断自动悬停),确保安全。
