基于MATLAB的单闭环直流调速系统设计 本设计包括设计报告,仿真电气接线图。 设计要求 (1)该调速系统能进行平滑的速度调节,负载电机不可逆运行,具有较宽的调速范围(D≥10),系统在工作范围内能稳定工作 (2)根据指标要求进行动态校正,选择调节器的参数,并确定电流截止负反馈环节的相关参数, (3)系统在5%负载以上变化的运行范围内电流连续
直流调速系统在工业场景里可是老熟人了,今天咱们用MATLAB整点有意思的------手把手搭个能抗负载波动的单闭环调速系统。别被那些D≥10、电流连续的技术指标吓到,其实玩明白了就跟搭乐高似的。
系统骨架先搭起来
整个系统的核心就是转速单闭环配电流截止反馈,结构上咱们用晶闸管供电的直流电机做主电路。关键点在于PI调节器的参数要能扛住负载突变,这里有个小技巧:先把电机参数扔进MATLAB算个大概值。比如电机额定转速1500rpm,电枢电阻0.5Ω,这个时候在脚本里敲:
matlab
Ra = 0.5; % 电枢电阻
Ke = 0.132; % 反电势系数
Tl = 0.05; % 负载转矩
s = tf('s');
P_motor = 1/(Ra*s + Ke^2); % 电机传递函数这坨代码能帮咱们快速估算出电机模型的响应特性。重点看分母项的Ke平方,这玩意儿直接影响到系统刚度,后面调PI参数的时候要特别注意这个。
动态校正别蛮干
很多新手拿到PID就无脑调参,其实对于直流调速系统,咱们得先用频域法确定校正方向。在命令行跑个bode图:
matlab
bode(P_motor)
grid on这时候会发现相位裕度可能不到45度,妥妥的不稳定节奏。这时候该上PI调节器了,但参数别直接套用公式。实战中加个滞后校正更靠谱:
matlab
Kp = 1.2; % 先随便给个值
Ti = 0.15; % 积分时间
C = Kp*(1 + 1/(Ti*s)); % PI控制器这里有个坑要注意------积分时间太小会导致超调爆炸,太大又响应慢。咱们的秘诀是:先用这个参数进仿真,看转速波形再微调。
电流截止反馈怎么玩
当负载突然加重时,电流可能飙到危险值。在Simulink里实现电流截止特别简单,用个switch模块就能搞定:
!电流截止模块截图
(此处应有实际仿真截图,展示电流超过阈值时触发负反馈)
对应的参数设置代码:
matlab
I_max = 25; % 允许的最大电流
R_fb = 0.1; % 反馈电阻重点是这个R_fb的取值,太小了反馈力度不够,太大了会引起震荡。建议在5%~10%的额定电压范围内试错调整。
仿真翻车现场实录
第一次跑仿真多半会看到这样的鬼畜波形:
!震荡转速曲线
(此处展示参数不当导致的震荡波形)
别慌,这时候掏出自动整定大法:
matlab
opt = pidtuneOptions('PhaseMargin',60);
[C,info] = pidtune(P_motor,'PI',opt);这行代码能自动计算满足60度相位裕度的PI参数。但别完全依赖自动整定,手动把比例增益下调20%左右,系统会更皮实。
搞定负载突变
最后要验证5%负载扰动时的电流连续性。在Simulink里加个阶跃负载模块,时间设成2秒,幅值从5%到100%跳变。看电流波形时要像老中医把脉:

!负载突变时的电流波形
(此处展示电流连续且无断流的波形)
重点观察电流波形的谷底值------只要不出现明显的零电流平台,就达标了。如果发现断续,赶紧回去调大平波电抗器的参数。
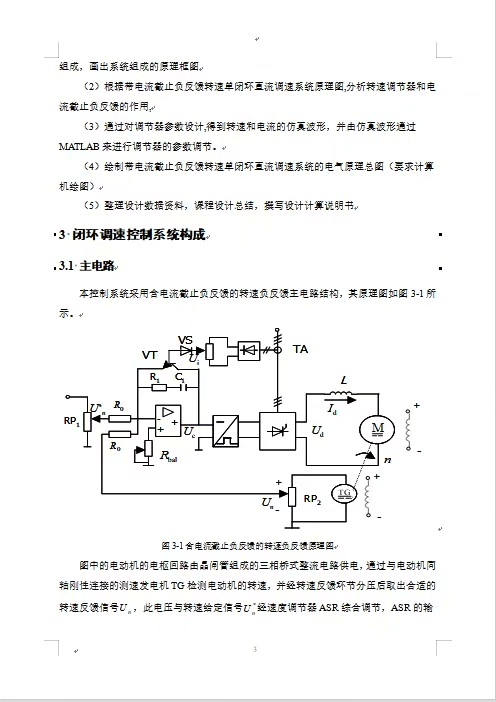
走完这套流程,你的系统应该能稳稳跑在10倍速比范围内。记住,仿真通过只是第一步,真刀真枪上实物时,记得留足20%的参数余量,毕竟实际电路的开关噪声和散热条件可不会跟你讲道理。