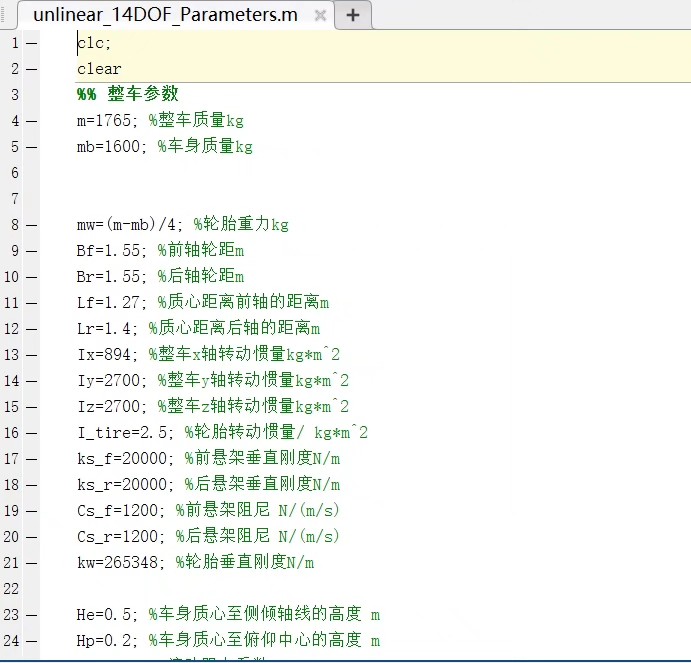
simulink整车十四自由度模型 ,7/14自由度整车模型 具体内容包括: 七自由度和十四自由度车辆模型,数据齐全, 含说明文档,建模清晰可用48, 其中,十四自由度模型可以控制四个车轮转向和转矩,包括纵向,横向,横摆,侧倾和车轮等多自由度, 输出位置和角度信息: 位置、航向角、侧倾角、俯仰角。 文档详实,代码规范,非常难得的资料!
在车辆动力学建模领域,Simulink无疑是一款强大的工具。今天要和大家分享的是超棒的Simulink整车十四自由度模型以及7/14自由度整车模型。
七自由度与十四自由度车辆模型概述
这两个模型的数据那叫一个齐全,还贴心附带说明文档,建模思路清晰明了,拿过来就能用,简直是建模爱好者和研究者的福音。
七自由度车辆模型
七自由度车辆模型一般考虑车辆的纵向、横向、垂向、横摆、侧倾、俯仰以及一个车轮旋转自由度。它在研究车辆的基本动力学特性,如转向响应、稳定性等方面有着广泛应用。虽然自由度相对14自由度模型少,但对于一些基础研究和初步分析已经足够,且计算量相对较小,便于快速得到结果。
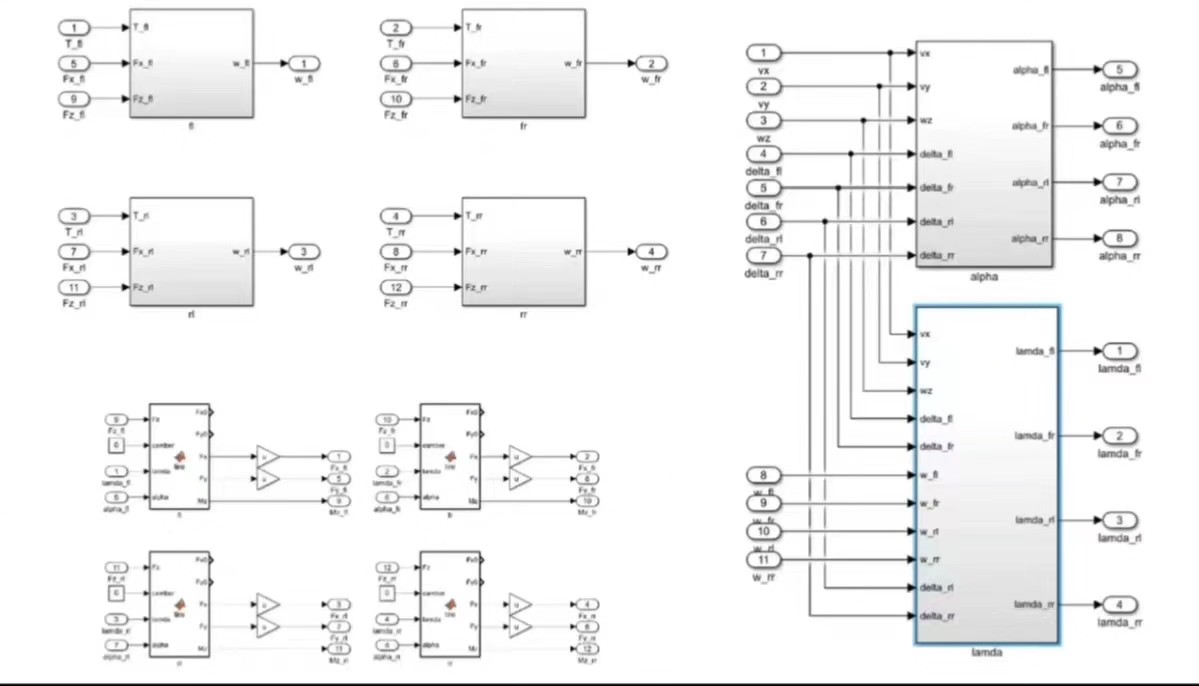
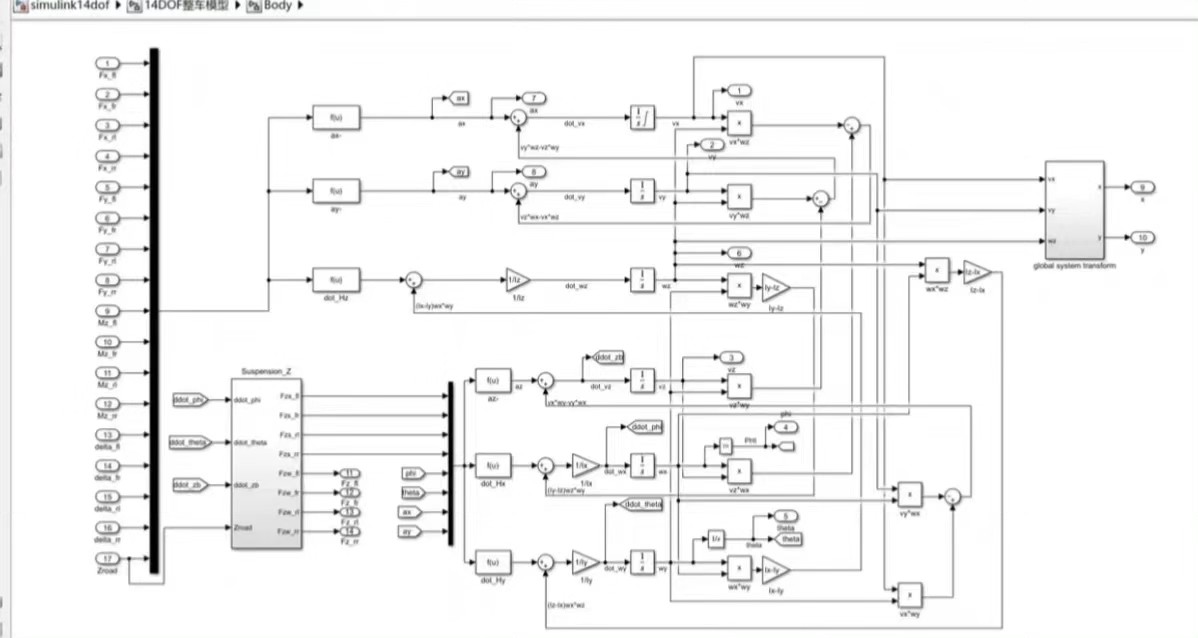
十四自由度车辆模型
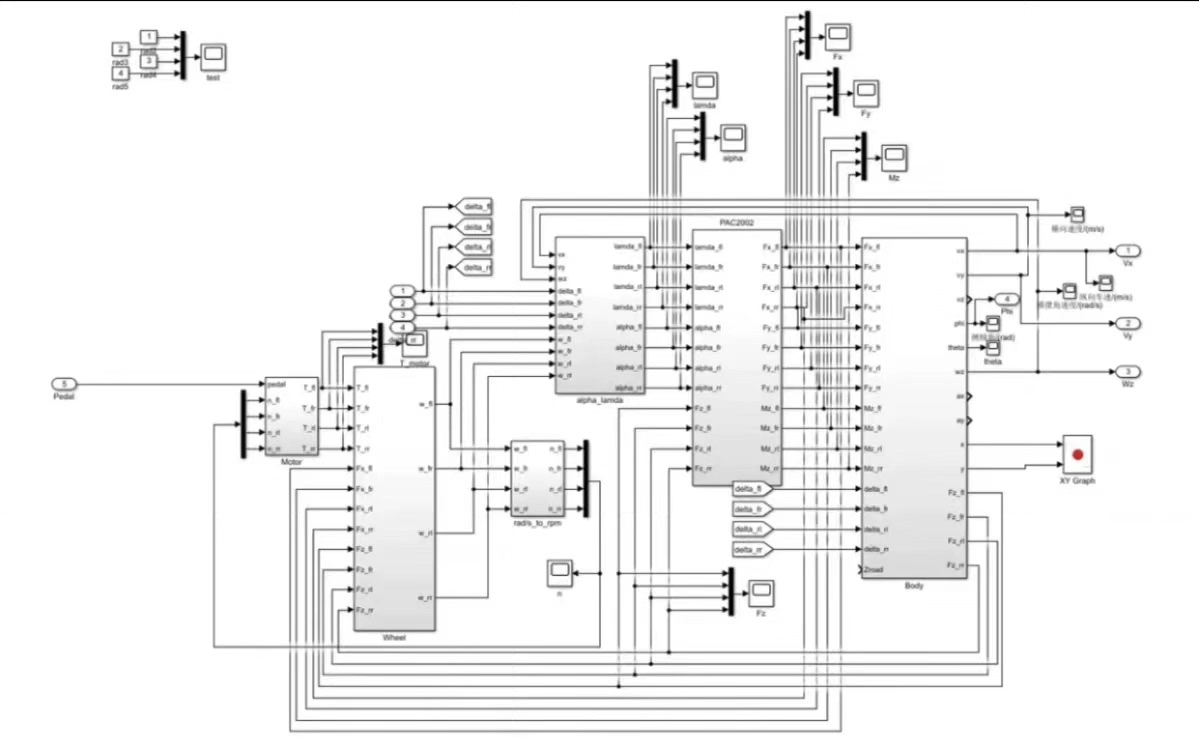
十四自由度模型可就更厉害了,它可以控制四个车轮转向和转矩。涵盖纵向、横向、横摆、侧倾和车轮等多自由度,能全方位模拟车辆行驶状态。从模型构成来看,它不仅要考虑车辆整体的运动,还要精确到每个车轮的运动细节。这使得它在复杂工况下,如极限驾驶、自动驾驶场景模拟等方面表现出色。
比如,在自动驾驶车辆的研发过程中,十四自由度模型能为算法提供更精准的车辆动力学反馈,帮助工程师更好地优化自动驾驶策略。
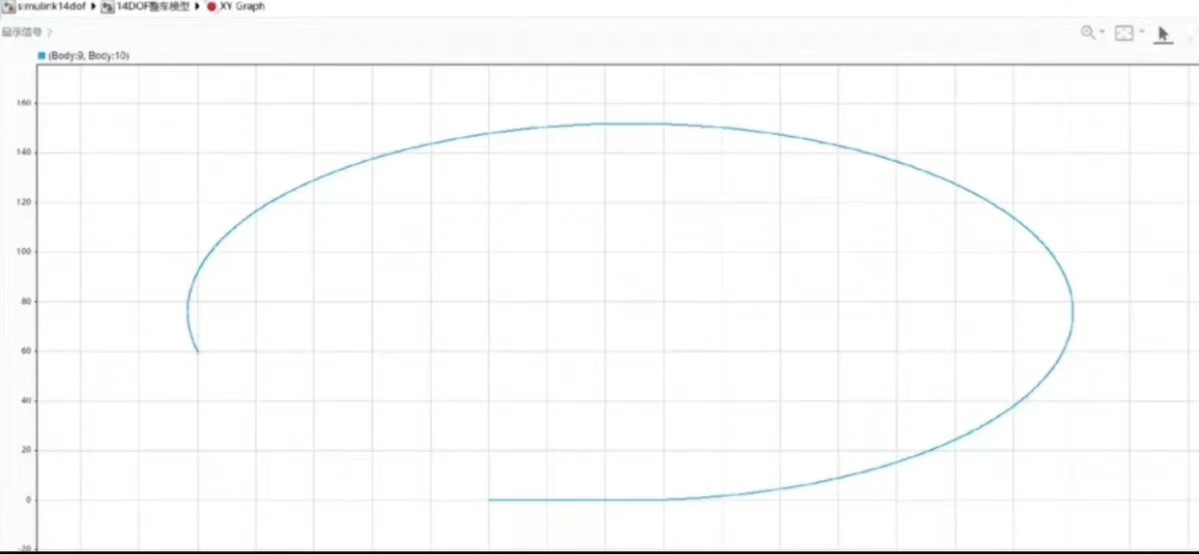
十四自由度模型的输出信息
该模型输出的位置和角度信息非常关键,包括位置、航向角、侧倾角、俯仰角。通过这些输出,我们能清晰地了解车辆在行驶过程中的姿态变化。
代码示例与分析
以获取车辆位置信息为例,在Simulink模型搭建中,假设我们有一个表示车辆位置的模块:
matlab
% 这里简单示意获取位置信息的代码逻辑
% 假设车辆位置由三个方向坐标组成[x, y, z]
position = [x_value, y_value, z_value];这里xvalue*、y* value、z_value是通过模型中各种动力学方程和参数计算得出。在实际的Simulink模型里,这些值可能来自不同的子模块计算,然后汇总到一个模块输出。通过这样的代码逻辑,我们就能准确获取车辆的位置信息,进一步分析车辆行驶轨迹。
simulink整车十四自由度模型 ,7/14自由度整车模型 具体内容包括: 七自由度和十四自由度车辆模型,数据齐全, 含说明文档,建模清晰可用48, 其中,十四自由度模型可以控制四个车轮转向和转矩,包括纵向,横向,横摆,侧倾和车轮等多自由度, 输出位置和角度信息: 位置、航向角、侧倾角、俯仰角。 文档详实,代码规范,非常难得的资料!
再看获取航向角的代码示例:
matlab
% 假设通过横摆角速度和时间积分等方式计算航向角
yaw_rate = getYawRate(); % 从相应模块获取横摆角速度
dt = 0.01; % 时间步长
yaw_angle = yaw_angle + yaw_rate * dt;这段代码通过不断累积横摆角速度与时间步长的乘积来更新航向角。在Simulink模型中,会有专门的模块来计算横摆角速度,我们只需要将其输出连接到这里的计算模块,就能实时得到车辆的航向角信息。
资料优势
整套资料文档详实,代码规范。详实的文档对于理解模型原理、参数设置以及如何使用模型都至关重要。即使是初次接触这类模型的人,通过阅读文档也能快速上手。而规范的代码则保证了模型的可靠性和可维护性。在实际应用中,如果需要对模型进行修改或者扩展功能,规范的代码结构能让我们迅速定位到需要修改的部分,大大提高工作效率。
总之,这套Simulink整车十四自由度模型以及7/14自由度整车模型资料非常难得,无论是对于科研工作者深入研究车辆动力学,还是工程师开发车辆相关控制系统,都是不可多得的宝藏。希望大家都能从中获取有价值的信息,在自己的项目中发挥其最大作用。