基于线性自抗扰(LADRC)的无人船航向控制系统系统Simulink/matlab仿真工程。 内附加有详细说明文档 内包含多种附加功能,包括 1.基于模糊控制(Fuzzy)的微分跟踪器(TD)优化方案。 2.基于STM32/Simulink硬件在环仿真功能。
在无人船领域,航向控制是确保其按预定路径行驶的关键技术。今天来聊聊基于线性自抗扰(LADRC)的无人船航向控制系统Simulink/Matlab仿真工程,这个工程相当有意思,还附带了不少强大的功能。
线性自抗扰(LADRC)简述
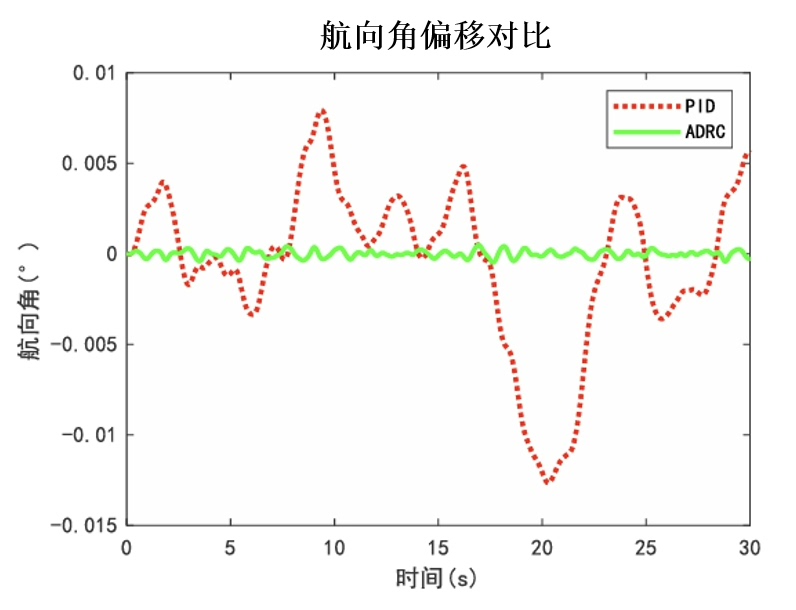
线性自抗扰控制技术是在自抗扰控制技术基础上发展而来,它通过对系统总扰动进行估计并补偿,使得系统在面对各种不确定性时仍能保持良好的控制性能。简单理解,就像是给无人船装了个 "智能护盾",能自动抵御外界干扰对航向的影响。
在Matlab中,实现线性自抗扰控制器(LADRC)的关键代码如下:
matlab
% 定义LADRC参数
beta01 = 100; % 跟踪微分器参数
beta02 = 1000;
beta1 = 30; % 扩张状态观测器参数
beta2 = 300;
beta3 = 3000;
kp = 0.5; % 线性状态误差反馈控制律参数
kd = 0.1;
% 跟踪微分器(TD)
function [x1, x2] = TD(u, x1, x2, h, beta01, beta02)
fhan = @(x1, x2, r, h) [x2; -r * sign(x1 + h * x2 + h^2 * r * sign(x1))];
x1 = x1 + h * x2;
x2 = x2 + h * fhan(x1 - u, x2, beta01, h);
end
% 扩张状态观测器(ESO)
function [z1, z2, z3] = ESO(y, z1, z2, z3, h, beta1, beta2, beta3)
e = z1 - y;
z1 = z1 + h * (z2 - beta1 * e);
z2 = z2 + h * (z3 - beta2 * sign(e));
z3 = z3 - h * beta3 * sign(e);
end
% 线性状态误差反馈控制律(LSEF)
function u0 = LSEF(z1, z2, z3, v1, v2, kp, kd)
u0 = kp * (v1 - z1) + kd * (v2 - z2) - z3;
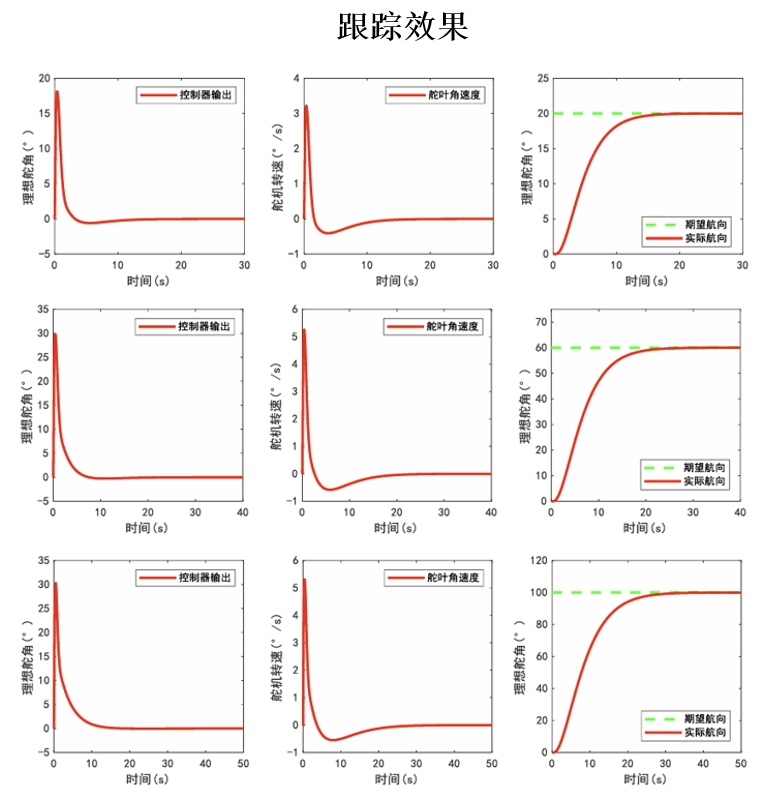
end上述代码中,TD 函数实现了跟踪微分器,它能安排过渡过程,使系统响应更加平稳。ESO 函数则是扩张状态观测器,负责估计系统的状态和总扰动。LSEF 函数基于观测器的输出,计算控制量,以实现对无人船航向的精确控制。
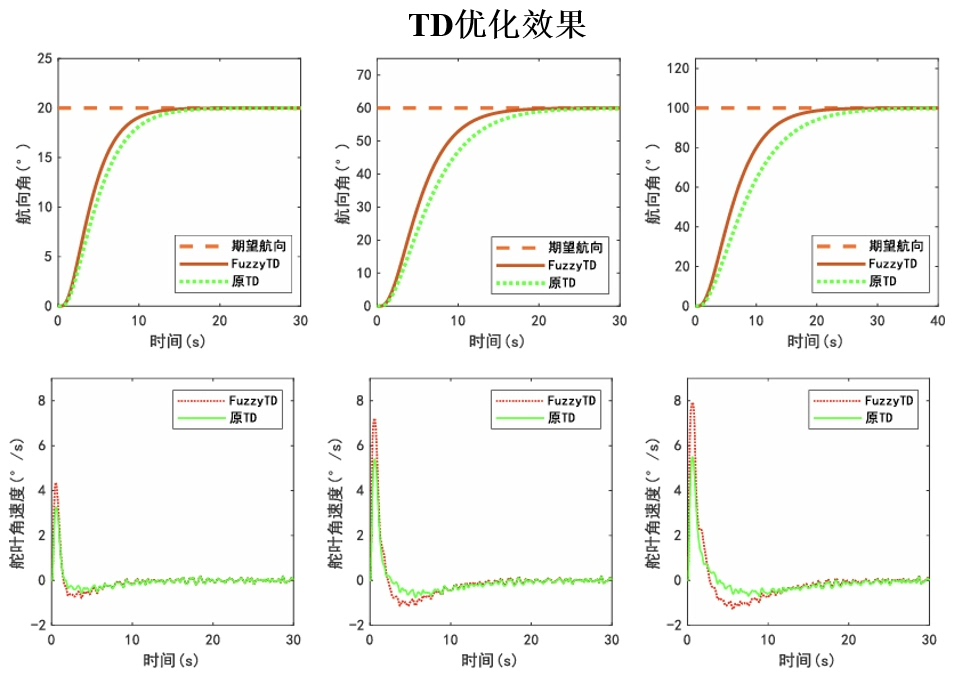
基于模糊控制(Fuzzy)的微分跟踪器(TD)优化方案
传统的微分跟踪器参数往往是固定的,在不同工况下难以达到最优性能。而基于模糊控制的优化方案就像给微分跟踪器安上了 "智能大脑",能根据系统状态实时调整参数。
在Matlab的Fuzzy Logic Toolbox中搭建模糊控制器。假设我们以无人船航向偏差和偏差变化率作为输入,输出为TD参数的调整系数。
matlab
% 创建模糊推理系统
fisMat = newfis('TD_fuzzy');
% 添加输入变量
fisMat = addvar(fisMat, 'input', 'error', [-1 1]);
fisMat = addvar(fisMat, 'input', 'error_change', [-1 1]);
% 添加输出变量
fisMat = addvar(fisMat, 'output', 'TD_coefficient', [0.5 1.5]);
% 定义隶属度函数
fisMat = addmf(fisMat, 'input', 1, 'NB', 'zmf', [-1 -0.5]);
fisMat = addmf(fisMat, 'input', 1, 'NS', 'trimf', [-1 0 0.5]);
% 此处省略其他隶属度函数定义
% 定义模糊规则
rulelist = [1 1 1 1 1;
1 2 2 1 1;
% 此处省略更多规则
];
fisMat = addrule(fisMat, rulelist);
% 保存模糊推理系统
save TD_fuzzy fisMat;这段代码创建了一个模糊推理系统 TD_fuzzy,通过定义输入输出变量及其隶属度函数,还有模糊规则,实现了根据无人船航向偏差和偏差变化率来调整TD参数。这种优化能在不同的航行条件下,自适应地优化TD性能,提升无人船航向控制的准确性和鲁棒性。
基于STM32/Simulink硬件在环仿真功能
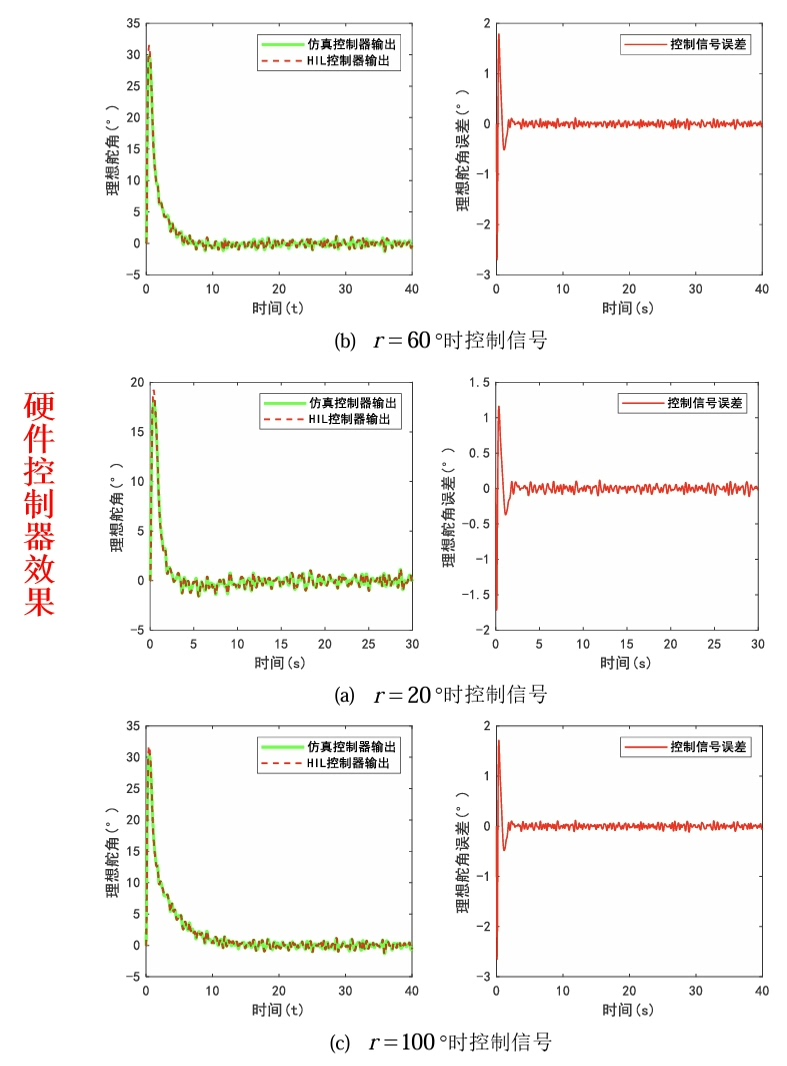
硬件在环仿真(HIL)是将实际硬件嵌入到仿真回路中进行测试的技术。在这个无人船航向控制系统中,结合STM32和Simulink实现HIL,能在接近真实环境的条件下对系统进行验证和调试。
首先,在Simulink中搭建好无人船航向控制系统模型。然后,通过Simulink支持的硬件代码生成功能,将模型转化为可在STM32上运行的C代码。
matlab
% 配置代码生成参数
cfg = coder.config('stm32.tlc');
cfg.GenerateASAP2=false;
cfg.HardwareBoard = 'Generic STM32F4xx';
cfg.Processor = 'Cortex-M4';
% 此处可根据实际STM32型号进一步调整参数
% 生成代码
codegen -config cfg your_model_name上述代码配置了代码生成参数,针对STM32F4系列芯片,通过 codegen 命令将Simulink模型 yourmodelname 生成适用于STM32的C代码。生成的代码下载到STM32开发板后,它就作为实际的控制器参与到仿真回路中,与Simulink中的无人船模型等部分共同完成硬件在环仿真。这种方式能提前发现硬件与软件结合时可能出现的问题,大大缩短开发周期,提高系统的可靠性。
这个基于线性自抗扰的无人船航向控制系统Simulink/Matlab仿真工程,无论是LADRC的核心控制,还是模糊优化TD以及STM32/Simulink硬件在环仿真功能,都为无人船航向控制技术的研究和开发提供了非常有价值的参考和实践基础。希望更多小伙伴能从中获取灵感,在无人船领域探索出更多创新成果。