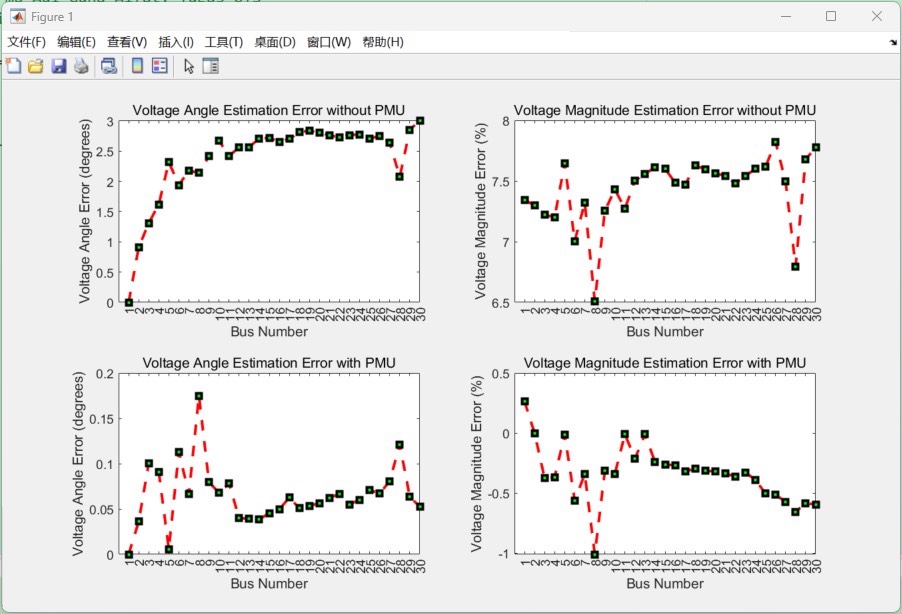
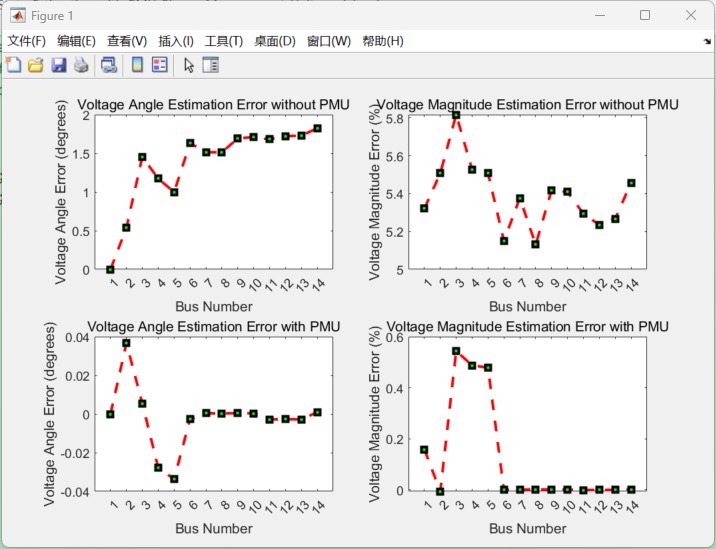
PMU测量来估计电力系统的状态。 解释了使用PMU测量来估计电力系统的状态,编写了Matlab程序,并在IEEE-14总线和IEEE-30总线系统上进行了仿真,以验证该方法。 该方法使用单独的线性状态估计器模型,该模型利用来自WLS的状态估计以及通过后处理的PMU电压和电流测量。 首先,该模型使用传统测量的WLS状态估计方法估计极坐标中的状态。 然后,该状态和PMU测量值(均以直角坐标表示)用于估计系统的最终状态。 保证能运行
在电力系统的研究与运行管理中,准确估计系统状态至关重要。今天咱们就聊聊通过PMU(相量测量单元)测量来估计电力系统状态的方法,并且用Matlab撸个代码实践下,在IEEE - 14总线和IEEE - 30总线系统上仿真验证验证。
方法原理
我们采用的是单独的线性状态估计器模型,这个模型结合了WLS(加权最小二乘)的状态估计成果,同时利用后处理的PMU电压和电流测量数据。
具体来说,先是用传统测量的WLS状态估计方法在极坐标中估计系统状态。假设我们有一系列电力系统的测量值 \(z\),包含节点电压幅值、相角、支路功率等,这些测量值和系统状态变量 \(x\)(节点电压幅值和相角)存在一定的非线性关系 \(z = h(x) + v\),其中 \(v\) 是测量噪声。WLS方法就是通过最小化 \(\sum*{i = 1}^{m} w* i (zi - h i(x))^2\) 来求解系统状态 \(x\),这里 \(wi\) 是对应测量值 \(zi\) 的权重。
然后呢,将这个极坐标下估计出来的状态,和以直角坐标表示的PMU测量值一起,用来估计系统的最终状态。
Matlab代码实现
matlab
% 假设已经有IEEE - 14总线或IEEE - 30总线系统的相关参数数据
% 这里以IEEE - 14总线系统为例,简单示意数据读取与处理
busdata = load('IEEE14bus_busdata.txt'); % 假设总线数据存储在这个文件
linedata = load('IEEE14bus_linedata.txt'); % 假设线路数据存储在这个文件
% WLS状态估计部分
% 构建雅可比矩阵和H矩阵
% 这里省略具体构建过程,因为涉及复杂的电力系统模型计算
% 简单假设已经有构建好的H矩阵和权重矩阵W
H = calculate_H_matrix(busdata, linedata);
W = calculate_W_matrix(busdata, linedata);
% 测量值z
z = get_measurement_values(busdata, linedata);
% 初始化状态估计值x_est
x_est = initial_guess(busdata);
% WLS迭代求解
max_iterations = 100;
tolerance = 1e - 6;
for k = 1:max_iterations
J = calculate_Jacobian_matrix(x_est); % 计算雅可比矩阵
residual = z - h(x_est);
delta_x = (J' * W * J) \ (J' * W * residual);
x_est = x_est + delta_x;
if norm(delta_x) < tolerance
break;
end
end
% 结合PMU测量估计最终状态
% 假设已经获取到PMU测量值pmu_measurements
pmu_measurements = get_PMU_measurements();
% 这里需要将极坐标的x_est转换为直角坐标
x_est_rectangular = polar_to_rectangular(x_est);
final_state = estimate_final_state(x_est_rectangular, pmu_measurements); 代码分析
- 数据读取 :通过
load函数读取IEEE - 14总线系统的总线数据和线路数据文件,这些数据是后续计算的基础。 - WLS状态估计 :
- 构建相关矩阵:
calculateHmatrix和calculateWmatrix函数分别用于构建H矩阵和权重矩阵W,虽然这里省略了具体构建过程,但实际中它们依赖于电力系统的拓扑结构和测量配置。 - 测量值获取:
getmeasurementvalues函数用于从读取的数据中提取测量值 \(z\)。 - 迭代求解:通过循环不断更新状态估计值 \(xest\),直到满足收敛条件(
norm(deltax) < tolerance)。每次迭代中,计算雅可比矩阵 \(J\),根据测量残差residual计算状态修正量delta_x,进而更新状态估计值。
- 构建相关矩阵:
- 结合PMU测量 :
- 坐标转换:
polartorectangular函数将极坐标下的状态估计值转换为直角坐标,以便和直角坐标表示的PMU测量值结合。 - 最终状态估计:
estimatefinalstate函数根据转换后的状态估计值和PMU测量值,估计系统的最终状态。
- 坐标转换:
通过在IEEE - 14总线和IEEE - 30总线系统上运行上述类似的代码,就可以验证我们利用PMU测量估计电力系统状态的方法啦。这样的实践不仅能让我们更深入理解电力系统状态估计的原理,还能通过代码实现提升解决实际问题的能力。希望这篇博文能给研究电力系统状态估计的小伙伴们一些启发。