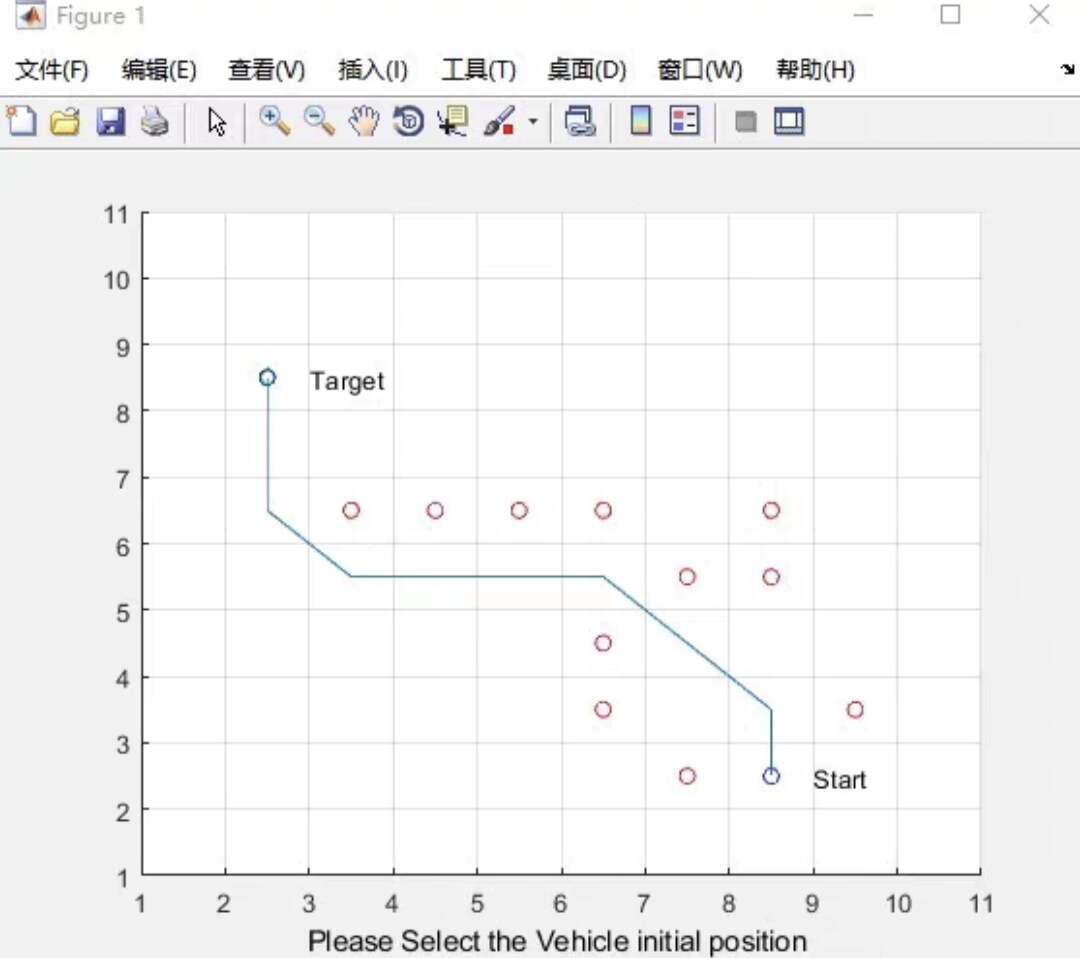
matlab算法,2维A*路径规划算法,在地图范围内(大小随意修改) ,可以通过鼠标点击来选择起始点,障碍物以及目标点的位置。 另外,支持导出dll库,matlab转c++,vs中可调用。 有3维A*算法需求的也可以联系,障碍物可以为任意格式三维模型,运动物体可以是三维模型,可以实现模型避障以及优化3维A*算法的计算时间。
A算法是一种经典的路径规划算法,广泛应用于游戏AI、机器人导航等领域。今天,我将分享如何在MATLAB中实现一个简单的二维A路径规划算法,并通过鼠标交互选择起点、终点和障碍物。此外,我还将介绍如何将MATLAB代码导出为DLL库,以便在C++项目中调用。
一、二维A*路径规划算法实现
首先,我需要定义地图的大小和初始化地图。这里我选择一个100x100的网格地图,当然你可以根据需要随意修改大小。
matlab
% 初始化地图
mapSize = 100;
map = zeros(mapSize, mapSize); % 0表示可通行区域,1表示障碍物接下来,我需要实现A*算法的核心部分,包括开放列表和关闭列表的管理、节点的生成与评估等。
matlab
% A*算法核心函数
function [path] = aStar(start, goal, map, mapSize)
% 初始化开放列表和关闭列表
openList = {};
closeList = {};
% 创建起点和终点节点
startNode = struct('pos', start, 'g', 0, 'h', heuristic(start, goal), 'f', 0 + heuristic(start, goal), 'parent', []);
goalNode = struct('pos', goal, 'g', 0, 'h', 0, 'f', 0, 'parent', []);
% 将起点加入开放列表
openList = [openList, startNode];
while ~isempty(openList)
% 找到f值最小的节点
[~, minIndex] = min([openList.f]);
currentNode = openList(minIndex);
% 将当前节点从开放列表移除并加入关闭列表
openList(minIndex) = [];
closeList = [closeList, currentNode];
% 检查是否到达目标节点
if currentNode.pos == goalNode.pos
path = reconstructPath(goalNode);
return;
end
% 生成当前节点的邻居节点
neighbors = generateNeighbors(currentNode, mapSize);
for i = 1:length(neighbors)
neighbor = neighbors(i);
% 检查邻居是否在关闭列表中
if isNodeInList(neighbor, closeList)
continue;
end
% 计算邻居的g值
tentativeG = currentNode.g + heuristic(currentNode.pos, neighbor.pos);
% 检查邻居是否在开放列表中
if isNodeInList(neighbor, openList)
existingNode = getNodeFromList(neighbor, openList);
if tentativeG >= existingNode.g
continue;
end
else
% 将邻居加入开放列表
neighbor.g = tentativeG;
neighbor.h = heuristic(neighbor.pos, goalNode.pos);
neighbor.f = neighbor.g + neighbor.h;
neighbor.parent = currentNode;
openList = [openList, neighbor];
end
end
end
% 未找到路径
path = [];
end二、通过鼠标交互选择起点、终点和障碍物
为了方便用户交互,我可以在MATLAB中使用ginput函数来获取鼠标点击的位置。
matlab
% 通过鼠标选择起点、终点和障碍物
figure;
imshow(map, 'InitialMagnification', 'fit');
title('点击选择起点、终点和障碍物');
disp('点击左键选择起点');
start = ginput(1);
disp('点击左键选择终点');
goal = ginput(1);
disp('点击左键选择障碍物,按回车键结束');
obstacles = ginput;然后,我需要将障碍物的位置标记在地图上。
matlab
% 将障碍物标记在地图上
for i = 1:length(obstacles)
x = round(obstacles(i,1));
y = round(obstacles(i,2));
map(y, x) = 1;
end三、导出DLL库
为了将MATLAB代码导出为DLL库,我需要使用MATLAB Coder。以下是导出步骤:
- 打开MATLAB Coder。
- 选择要导出的函数(如
aStar)。 - 配置项目设置,选择目标语言为C++。
- 生成DLL库。
生成的DLL库可以在C++项目中调用。以下是C++代码示例:
cpp
#include "aStar.h"
#include <vector>
int main() {
// 定义起点、终点和地图
double start[] = {10, 10};
double goal[] = {90, 90};
double map[100][100] = {0};
// 调用A*算法
double* path;
int pathLength;
aStar(start, goal, map, 100, &path, &pathLength);
// 处理路径
for (int i = 0; i < pathLength; i++) {
printf("Path point %d: (%.2f, %.2f)\n", i, path[2*i], path[2*i+1]);
}
// 释放内存
mxFree(path);
return 0;
}四、扩展到三维A*算法
如果你有三维A算法的需求,也可以联系我。我可以实现三维A算法,支持任意格式的三维障碍物模型和三维运动物体模型,并优化三维A*算法的计算时间。
总结
通过本文,我展示了如何在MATLAB中实现一个简单的二维A路径规划算法,并通过鼠标交互选择起点、终点和障碍物。此外,我还介绍了如何将MATLAB代码导出为DLL库,以便在C++项目中调用。如果你有三维A算法的需求,也可以联系我进行合作。