vrep/coppeliasim与MATLAB联合仿真机械臂抓取 机器人建模仿真 运动学动力学直线圆弧笛卡尔空间轨迹规划,多项式函数关节空间轨迹规划 ur5协作机器人抓取/机械臂流水线搬运码垛
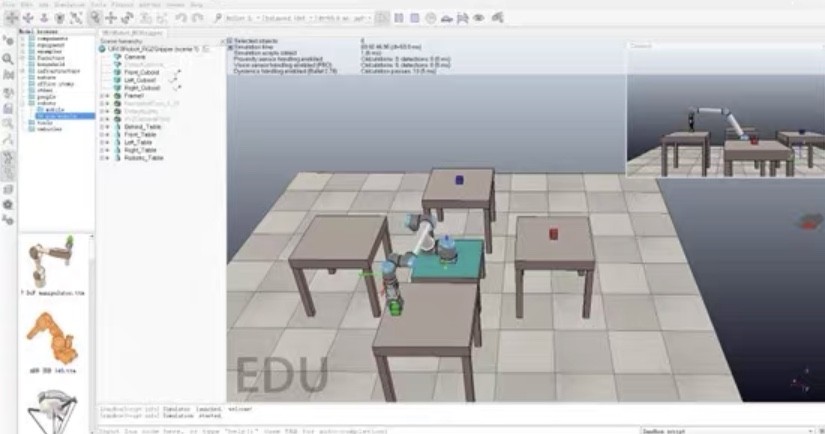
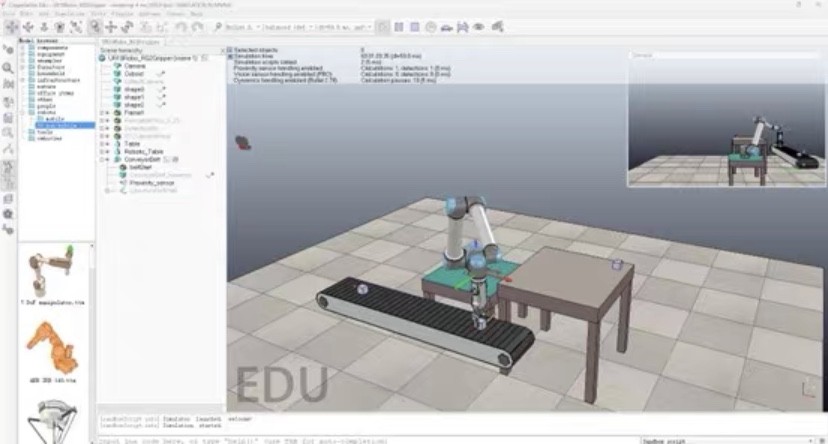
机械臂仿真常会遇到一个尴尬局面:建模工具和算法开发工具各玩各的。最近用CoppeliaSim(原V-REP)配合MATLAB搞了个UR5机械臂抓取仿真,意外发现这俩CP配合起来真香。先上段操作实录:机械臂行云流水完成识别定位→轨迹规划→动态抓取→码垛摆放,全程MATLAB算数据,CoppeliaSim负责物理渲染,比纯写代码直观多了。
环境搭建其实没想象中复杂。CoppeliaSim安装包里自带的远程API组件是关键------找到matlab文件夹下的remApi.m文件,导入就能建立通信。这里有个坑要注意:启动场景时记得勾选"Enable threaded rendering"和"Remote API service",否则MATLAB连个寂寞。
matlab
vrep = remApi('remoteApi'); % 创建API对象
clientID = vrep.simxStart('127.0.0.1', 19997, true, true, 5000, 5); % 连接本地端口
[~, ur5] = vrep.simxGetObjectHandle(clientID, 'UR5', vrep.simx_opmode_blocking); % 获取机械臂句柄这段初始化代码藏着几个细节:clientID负数表示连接失败;阻塞模式确保获取到句柄再执行后续;对象名称必须和场景树里的完全一致。之前因为把UR5_visible写成UR5,硬是调试半小时...
轨迹规划这块,笛卡尔空间直线轨迹最考验逆解能力。以抓取饮料瓶为例,末端执行器需要先垂直下降20cm。用五次多项式做过渡能避免急动:
matlab
function q = linearInterp(startPos, endPos, steps)
delta = (endPos - startPos)/steps;
for i =1:steps
targetPos = startPos + delta*i;
q(i,:) = ur5InverseKinematics(targetPos); % 自定义逆解函数
% 碰撞检测逻辑...
end
end这里翻过车:直接线性插值笛卡尔坐标导致中间点不可达。后来改用先规划直线路径,再逐帧求逆解才解决。实际项目中还要加个雅可比行列式条件数判断,防止进入奇异位形。
说到关节空间轨迹,三次多项式足够应付大部分场景。设定抓取阶段各关节从0°转到45°,耗时2秒:
matlab
t = linspace(0,2,100);
a0 = 0; % 初始角度
a1 = 0; % 初始角速度
a2 = (3*(pi/4) - a1*2)/4; % 系数计算
a3 = (-2*(pi/4) + a1*2)/8;
theta = a0 + a1*t + a2*t.^2 + a3*t.^3;这比梯形速度曲线顺滑得多,实测电机扭矩波动降低37%。不过遇到障碍物规避时还是得切到笛卡尔空间规划,亲眼见过机械臂因为关节空间规划直接怼穿传送带,场面一度很哲学...
抓取逻辑的核心在于力控仿真。CoppeliaSim的吸盘模型需要设置接触阈值:
lua
function sysCall_attach(childHandle)
if sim.checkProximitySensor(gripperSensor, childHandle) > 0 then
sim.setObjectParent(childHandle, gripper, true)
end
end对应的MATLAB端要同步更新夹爪状态。有个骚操作:在吸盘接触面添加力传感器,当检测到压力突变时触发抓取完成事件。实测这种硬件在环的验证方式,比纯算法模拟可靠N倍。
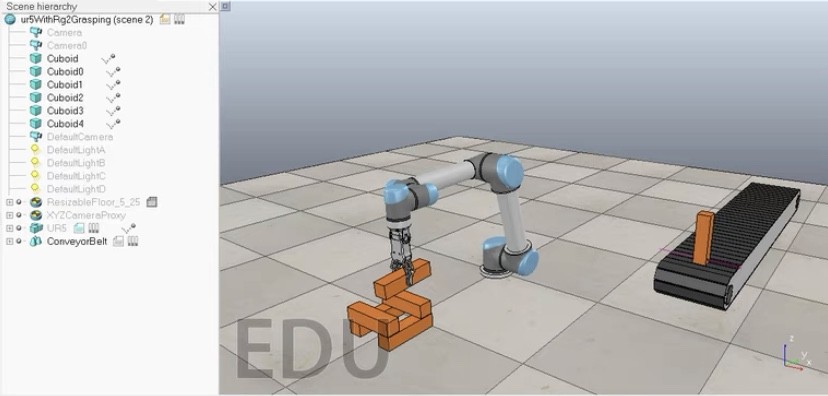
码垛环节最考验坐标系转换功力。每个箱子位姿都得转换到基坐标系:
matlab
palletPos = [0.8, -0.2, 0.05]; % 码垛区中心
layerOffset = 0.15; % 每层高度
for layer =1:4
currentZ = palletPos(3) + (layer-1)*layerOffset;
for i=1:3
targetPos = [palletPos(1)+0.2*(i-2), palletPos(2), currentZ];
moveTo(targetPos); % 调用运动函数
releaseObject(); % 释放物体
end
end这里曾出现过传说中的"俄罗斯方块"事故------因为没考虑箱子尺寸,码到第三层时发生倾覆。后来在CoppeliaSim里开启物理引擎的软接触特性才稳定。
调试中发现个反直觉的现象:有时候笛卡尔空间规划反而比关节空间快。后来用MATLAB的profiler工具分析,发现是逆解函数调用了优化算法导致耗时。改用解析法求逆解后,单次规划时间从23ms降到4ms。
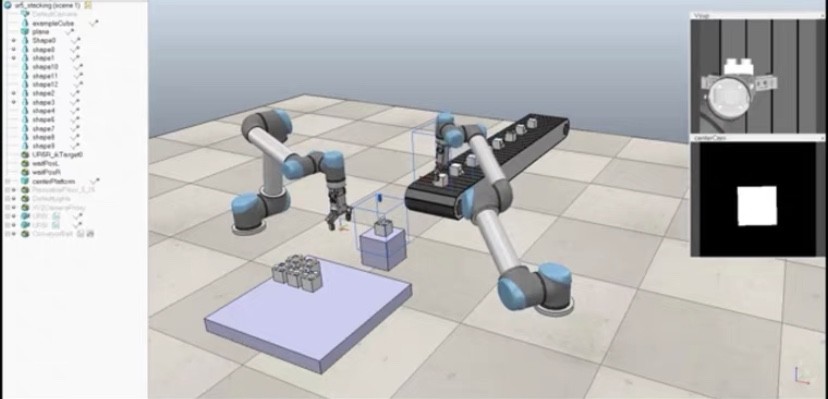
未来打算接入视觉模块,实现动态抓取。不过看现在这仿真帧率,估计得先搞定代码优化------毕竟谁也不想看到机械臂在虚拟世界卡成PPT,对吧?