目录
[1. 前言](#1. 前言)
[2. tf 和 tf2的比较](#2. tf 和 tf2的比较)
[1. 架构和内聚性(模块化)](#1. 架构和内聚性(模块化))
[2. 效率和功能(静态变换是关键)](#2. 效率和功能(静态变换是关键))
[2.1 启动命令的差异](#2.1 启动命令的差异)
[核心区别: TF 必须不断地重复发布相同的静态变换,而 TF2 认识到这是静态变换,所以只在必要时发送。](#核心区别: TF 必须不断地重复发布相同的静态变换,而 TF2 认识到这是静态变换,所以只在必要时发送。)
[2.2 运行结果比对](#2.2 运行结果比对)
[rostopic echo /tf](#rostopic echo /tf)
1. 前言
最近在使用tf or tf_ros2 来发布消息,一直出现问题,记录一下。
bash
## tf 正确
<node pkg="tf" type="static_transform_publisher" name="base"
args="0 0 0 0 0 0 1 /base /combine 50" />
## tf_ros2 错误
<node pkg="tf_ros2" type="static_transform_publisher" name="base"
args="0 0 0 0 0 0 1 /base /combine 50" />
## tf_ros2 正确
<node pkg="tf_ros2" type="static_transform_publisher" name="base"
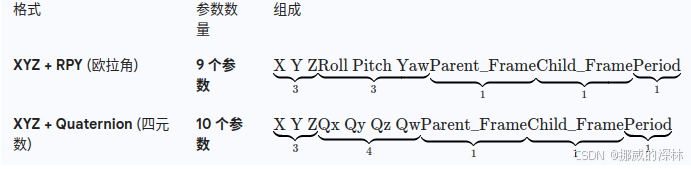
args="0 0 0 0 0 0 1 /base /combine" />static_transform_publisher 是一个 ROS 工具,用于发布一个不变的坐标变换。它要求用户提供特定数量的参数来定义 平移 (Position) 、旋转 (Orientation) 、坐标系名称 (Frames) 和 发布频率 (Period)。
static_transform_publisher 有两种正确的使用格式:
对于tf2, 不用使用
2. tf 和 tf2的比较
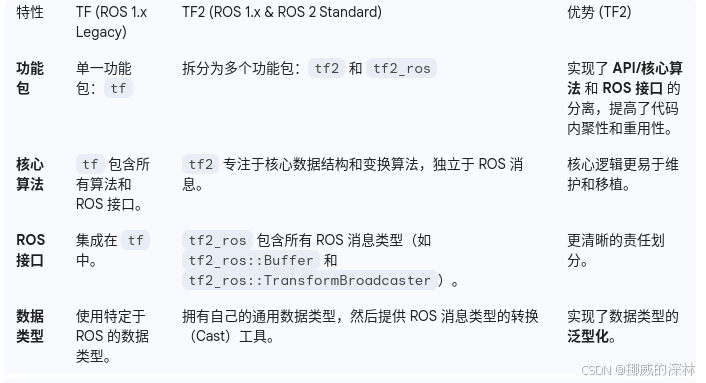
1. 架构和内聚性(模块化)
这是两者最大的区别,TF2 更加模块化和内聚。
2. 效率和功能(静态变换是关键)
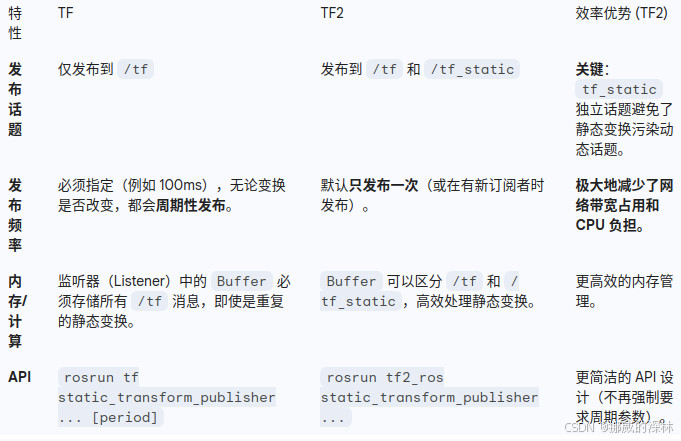
TF2 引入了 tf_static 话题,显著提高了发布不常变动的坐标变换的效率。
2.1 启动命令的差异
| 版本 | 命令 | 最后参数 | 含义 |
|---|---|---|---|
| TF2 | rosrun tf2_ros static_transform_publisher 0 0 0 0 0 0 /base_link /laser |
无 | TF2 版本默认发布频率极低(实际上通常只发布一次),并将变换发布到 /tf_static 话题。 |
| TF | rosrun tf static_transform_publisher 0 0 0 0 0 0 /base_link /laser 100 |
100 (ms) |
TF 版本必须 指定发布周期(这里是 100ms),并将变换发布到 /tf 话题。 |
++核心区别: TF 必须不断地重复发布相同的静态变换,而 TF2 认识到这是静态变换,所以只在必要时发送。++
2.2 运行结果比对
rostopic echo /tf
-
输出行为: 循环输出坐标系信息。
-
原因: TF 版本的
static_transform_publisher被配置为以 10Hz(即 100ms 周期)向/tf话题发送消息。即使变换 T/base_link/laser 始终是单位变换 (0,0,0,0,0,0,1),它也会每隔 100ms 发送一次相同的消息。 -
作用:
/tf话题专门用于发布那些随时间不断变化的动态变换 (例如,机器人里程计 )。
)。
rostopic echo /tf_static
-
输出行为: 坐标系信息只输出一次(或在新订阅者连接时再次输出)。
-
原因: TF2 版本的
static_transform_publisher认识到这是一个静态变换,因此它通过 Latched Topic (锁存话题) 的机制发布到/tf_static。- 锁存话题 (Latched Topic): 当发布者发送一条消息后,它会保持(锁存)在话题上。任何新的订阅者连接时,都会立即收到最后一条已发布的锁存消息。
-
作用: 这样可以确保:
-
网络上没有重复的静态数据传输。
-
任何新的 TF 监听器启动时,都能立即获取所有静态变换,而无需等待下一次周期性发布。
-
总结: 在 TF2 中,如果您要发布一个摄像头相对机械臂末端的标定结果(它不会改变),您应该使用 /tf_static 。如果您要发布一个机器人的轮式里程计(它每秒都在变化),您应该使用 /tf。