3次B样条优化,适用于所有matlab程序,单独的独立子程序,可以直接在自己的程序上进行优化使用~提供自己写的算法原理文档~
在 Matlab 的编程世界里,优化永远是一个热门话题。今天咱就唠唠 3 次 B 样条优化,这可是个适用于所有 Matlab 程序的利器,而且是以单独独立子程序的形式存在,方便你直接在自己的程序里拿来就用。
一、算法原理
3 次 B 样条曲线是一种在计算机图形学和数据处理中广泛应用的曲线表示方法。它具有良好的局部控制特性和光滑性。简单来说,给定一组控制点,3 次 B 样条曲线会根据这些点生成一条平滑的曲线。
假设我们有一组控制点 P_i,i = 0,1,\\cdots,n,3 次 B 样条曲线的表达式为:
C(u)=\\sum*{i = 0}\^{n}N*{i,3}(u)P_i
其中,N_{i,3}(u) 是 3 次 B 样条基函数,它的计算是基于 Cox - de Boor 递归公式:
N*{i,0}(u)=\\begin{cases}1, \& \\text{if }t*i\\leq u\\lt t_{i + 1}\\\\0, \& \\text{otherwise}\\end{cases}
N*{i,k}(u)=\\frac{u - t* i}{t*{i + k}-t* i}N*{i,k - 1}(u)+\\frac{t* {i + k + 1}-u}{t*{i + k + 1}-t*{i+1}}N_{i + 1,k - 1}(u)
这里的 t_i 是节点向量,它决定了曲线在参数 u 不同取值时对控制点的依赖程度。
二、独立子程序实现
下面咱来看关键的代码部分,这就是实现 3 次 B 样条优化的独立子程序。
matlab
function [curve] = bSpline3Optimization(controlPoints, numPoints)
% controlPoints 是控制点矩阵,每行一个控制点
% numPoints 是要生成的曲线上的点数
% 节点向量的生成
n = size(controlPoints, 1);
knotVector = zeros(1, n + 3);
knotVector(1:4) = 0;
knotVector(n:n + 3) = 1;
for i = 5:n + 2
knotVector(i) = knotVector(i - 1) + 1 / (n - 2);
end
curve = zeros(numPoints, size(controlPoints, 2));
for j = 1:numPoints
u = (j - 1) / (numPoints - 1);
basis = zeros(1, n);
for i = 1:n
basis(i) = basisFunction(u, i, 3, knotVector);
end
curve(j, :) = basis * controlPoints;
end
end
function [basisValue] = basisFunction(u, i, k, knotVector)
if k == 0
if knotVector(i) <= u && u < knotVector(i + 1)
basisValue = 1;
else
basisValue = 0;
end
else
if knotVector(i + k) == knotVector(i)
alpha1 = 0;
else
alpha1 = (u - knotVector(i)) / (knotVector(i + k) - knotVector(i));
end
if knotVector(i + k + 1) == knotVector(i + 1)
alpha2 = 0;
else
alpha2 = (knotVector(i + k + 1) - u) / (knotVector(i + k + 1) - knotVector(i + 1));
end
basisValue = alpha1 * basisFunction(u, i, k - 1, knotVector) + alpha2 * basisFunction(u, i + 1, k - 1, knotVector);
end
end代码分析
- 主函数
bSpline3Optimization:- 首先接收两个输入参数,
controlPoints是控制点矩阵,每一行代表一个控制点;numPoints是我们希望在生成的 B 样条曲线上获取的点数。 - 生成节点向量
knotVector。开头和结尾部分的节点值固定为 0 和 1,中间部分均匀分布。这是因为在这个简单的实现里,我们采用了均匀节点向量,在实际应用中可以根据需求调整。 - 初始化一个矩阵
curve用于存储生成的曲线上的点。然后通过循环,对于每一个参数值u,计算对应的 B 样条基函数值basis,再通过基函数与控制点的乘积和得到曲线上的点curve(j,:)。
- 首先接收两个输入参数,
- 子函数
basisFunction:- 这个函数用于递归计算 B 样条基函数值。如果
k为 0,根据节点向量直接判断u是否在相应区间来确定基函数值。如果k大于 0,则根据 Cox - de Boor 递归公式,通过计算两个低次基函数的加权和来得到当前基函数值。这里对分母为 0 的情况进行了特殊处理,保证程序的健壮性。
- 这个函数用于递归计算 B 样条基函数值。如果
三、如何在自己程序中使用
假设你有一个简单的绘图程序,原本是直接连接控制点来绘制图形,现在想要用 3 次 B 样条优化使其更平滑。
matlab
% 原始控制点
controlPoints = [0 0; 1 2; 2 1; 3 3];
numPoints = 100;
% 使用 3 次 B 样条优化得到曲线点
curvePoints = bSpline3Optimization(controlPoints, numPoints);
% 绘图
figure;
plot(controlPoints(:,1), controlPoints(:,2), 'ro - ', 'DisplayName', 'Control Points');
hold on;
plot(curvePoints(:,1), curvePoints(:,2), 'b - ', 'DisplayName', '3 - B - Spline Curve');
legend;在这个例子中,我们先定义了一组控制点,然后调用 bSpline3Optimization 函数得到优化后的曲线点,最后将控制点和 B 样条曲线绘制出来。可以看到,通过 3 次 B 样条优化,原本生硬连接控制点的图形变得平滑了许多。
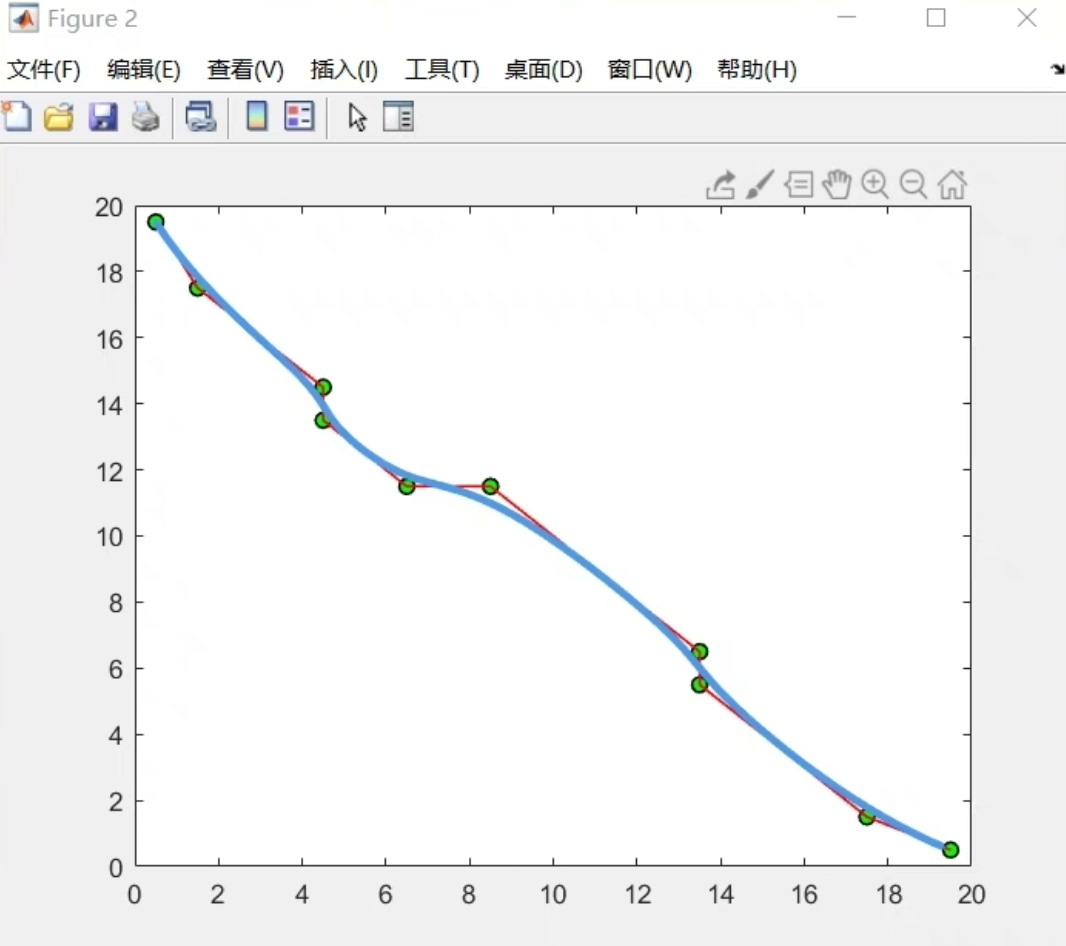
总之,这个 3 次 B 样条优化的独立子程序为你的 Matlab 程序提供了一种高效、便捷的曲线优化方式,不妨在你的项目里试试吧。我也提供了详细的算法原理文档,大家可以结合文档和代码深入理解,根据自己的需求进一步优化。