python,全覆盖路径规划算法,Astar算法
在路径规划的领域里,全覆盖路径规划算法旨在让机器人或设备能够遍历指定区域的每一个角落,这在诸如扫地机器人、无人机测绘等场景中有着重要应用。而A算法,作为一种经典且高效的启发式搜索算法,常被用于寻找最优路径。今天咱们就来聊聊如何用Python实现基于A算法的全覆盖路径规划。
A*算法原理简述
A*算法结合了Dijkstra算法的广度优先搜索策略和贪心算法的最佳优先搜索策略。它通过一个估值函数f(n) = g(n) + h(n)来评估每个节点,其中g(n)是从起点到节点n的实际代价,h(n)是从节点n到目标点的估计代价。算法总是选择f(n)值最小的节点进行扩展,以此来高效地找到最优路径。
Python实现代码示例
python
import heapq
def heuristic(a, b):
return abs(a[0] - b[0]) + abs(a[1] - b[1])
def astar(array, start, goal):
open_set = []
heapq.heappush(open_set, (0, start))
came_from = {}
g_score = {node: float('inf') for node in [(x, y) for x in range(len(array)) for y in range(len(array[0]))]}
g_score[start] = 0
f_score = {node: float('inf') for node in [(x, y) for x in range(len(array)) for y in range(len(array[0]))]}
f_score[start] = heuristic(start, goal)
while open_set:
_, current = heapq.heappop(open_set)
if current == goal:
path = []
while current in came_from:
path.append(current)
current = came_from[current]
path.append(start)
path.reverse()
return path
for neighbor in [(0, 1), (0, -1), (1, 0), (-1, 0)]:
neighbor_pos = (current[0] + neighbor[0], current[1] + neighbor[1])
if 0 <= neighbor_pos[0] < len(array) and 0 <= neighbor_pos[1] < len(array[0]) and \
array[neighbor_pos[0]][neighbor_pos[1]] == 0:
tentative_g_score = g_score[current] + 1
if tentative_g_score < g_score[neighbor_pos]:
came_from[neighbor_pos] = current
g_score[neighbor_pos] = tentative_g_score
f_score[neighbor_pos] = tentative_g_score + heuristic(neighbor_pos, goal)
if neighbor_pos not in [i[1] for i in open_set]:
heapq.heappush(open_set, (f_score[neighbor_pos], neighbor_pos))
return None代码分析
- heuristic函数:这个函数计算的是曼哈顿距离,也就是h(n)。它简单地通过计算两个点在横纵坐标差值的绝对值之和,来估计从一个点到另一个点的距离。这是一种很常用的启发式函数,在网格地图这种场景下很有效。
- astar函数 :
- 初始化部分 :
open*set**是一个优先队列,使用heapq来实现,里面存放的是待扩展的节点,以f(n)值作为优先级。一开始把起点放入队列。came*from字典用于记录路径,每个节点记录它是从哪个节点过来的。gscore**和fscore字典分别记录每个节点的g(n)和f(n)值,初始都设为无穷大,起点的g(n)设为0,f(n)设为起点到目标点的启发式估计值。- 主循环部分 :
- 每次从
open*set**中取出f(n)值最小的节点current。如果这个节点就是目标节点,就开始回溯路径并返回。 - 然后遍历当前节点的四个邻居(上下左右),如果邻居在地图范围内且是可通行的(假设值为0表示可通行),就计算从起点到邻居的暂定g(n)值。
- 如果这个暂定g(n)值小于邻居原来的g(n)值,就更新邻居的
came*from、g(n)和f(n)值,并把邻居加入open_set。
结合全覆盖路径规划
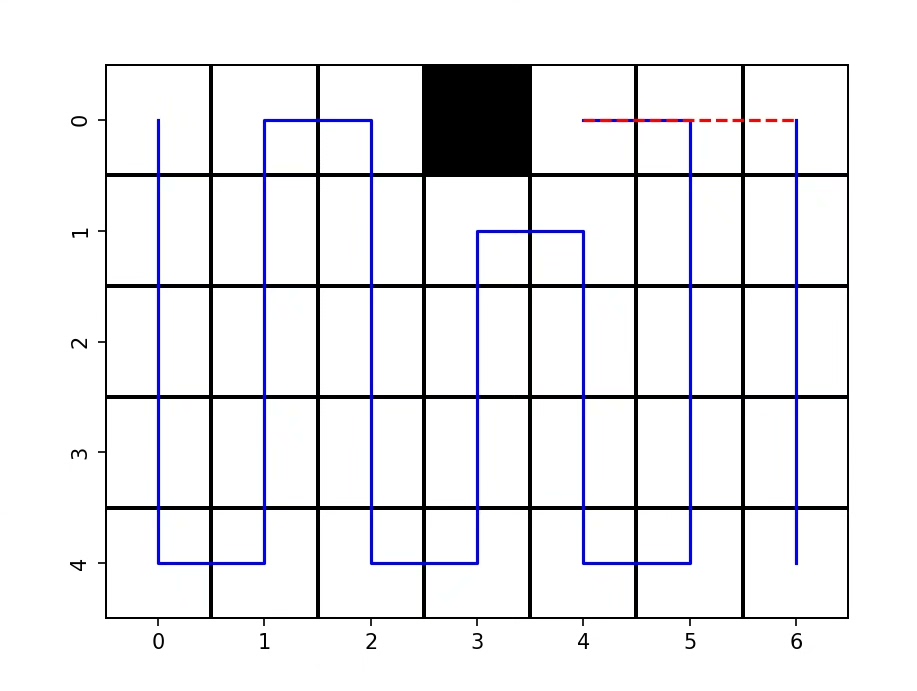
要实现全覆盖路径规划,我们可以在地图上划分多个子目标区域,然后依次使用A*算法从当前位置到每个子目标区域,遍历完所有子目标区域就实现了全覆盖。不过这只是一个简单思路,实际实现还需要考虑如何划分区域、如何处理边界等诸多问题。
希望通过这篇文章,大家对使用Python实现基于A*算法的全覆盖路径规划有了更清晰的认识,后续可以继续深入研究和优化,让路径规划更加智能和高效。