一种结合RRT与人工势场法APF的无人机编队动态避障控制 该模型采用快速搜索随机树算法(RRT)与人工势场法(APF)实现无人机动态避障的路径规划,并根据环境条件的要求重塑编队的几何形状。 实验证明了在有静态和移动障碍物的混乱环境中精确导航无人机编队的可能性。 注意:本模型为python代码,源于国外卡梅隆大学,包含完整代码与paper。 此外,还附参考文献
嘿,各位技术宅们!今天咱来聊聊一种超酷炫的无人机编队动态避障控制模型,它巧妙地结合了快速搜索随机树算法(RRT)与人工势场法(APF) ,这俩算法凑一块儿,简直是为无人机在复杂环境中开辟了一条"光明大道"。
这个模型的厉害之处在于,它不仅能实现无人机动态避障的路径规划,还能根据不同的环境条件要求,灵活重塑编队的几何形状。想象一下,无人机群在各种复杂的环境里,像一群训练有素的舞者,既能巧妙避开障碍物,还能随时变换优美的队形,是不是超赞!
算法原理
RRT算法
RRT算法就像是在一个巨大的迷宫里随机摸索出口的探险家。它通过不断随机采样空间中的点,然后将新采样的点连接到树中离它最近的节点,逐步构建出一棵搜索树。
下面是一段简单的RRT算法Python代码示例(仅为示意,非完整代码):
python
import random
class Node:
def __init__(self, point):
self.point = point
self.parent = None
def rrt(start, goal, obstacle_list, max_iter):
tree = [Node(start)]
for i in range(max_iter):
random_point = (random.random(), random.random()) # 在一定范围内随机采样点
nearest_node = min(tree, key=lambda node: ((node.point[0] - random_point[0]) ** 2 + (node.point[1] - random_point[1]) ** 2) ** 0.5)
new_point = (nearest_node.point[0] + (random_point[0] - nearest_node.point[0]) * 0.1,
nearest_node.point[1] + (random_point[1] - nearest_node.point[1]) * 0.1) # 向随机点靠近一定距离
new_node = Node(new_point)
new_node.parent = nearest_node
tree.append(new_node)
if ((new_point[0] - goal[0]) ** 2 + (new_point[1] - goal[1]) ** 2) ** 0.5 < 0.1:
return new_node # 找到接近目标点的路径
return None在这段代码里,首先定义了一个Node类来表示树中的节点,每个节点包含自身的位置和父节点信息。rrt函数则开始构建搜索树的过程,在循环中不断随机采样点,找到树中离采样点最近的节点,然后向采样点靠近一定距离生成新节点,并添加到树中。当新节点足够接近目标点时,就找到了一条路径。
APF算法
人工势场法就像给无人机周围的环境赋予了一种"力场"。目标点会对无人机产生引力,而障碍物会产生斥力。无人机就像在这些力的作用下的小粒子,朝着目标点前进,同时避开障碍物。
简单的APF算法Python代码如下(同样仅为示意):
python
import math
def attractive_force(agent, goal, eta):
return eta * (goal - agent)
def repulsive_force(agent, obstacle, rho0, k):
dist = math.sqrt((agent[0] - obstacle[0]) ** 2 + (agent[1] - obstacle[1]) ** 2)
if dist < rho0:
return k * (1 / dist - 1 / rho0) * (1 / dist ** 2) * (agent - obstacle)
else:
return 0
def apf(agent, goal, obstacle_list, eta, rho0, k):
total_force = attractive_force(agent, goal, eta)
for obstacle in obstacle_list:
total_force += repulsive_force(agent, obstacle, rho0, k)
return total_force在这段代码中,attractiveforce**函数计算目标点对无人机的引力,repulsive force函数计算障碍物对无人机的斥力,apf函数综合计算总力,无人机就会沿着这个总力的方向移动。
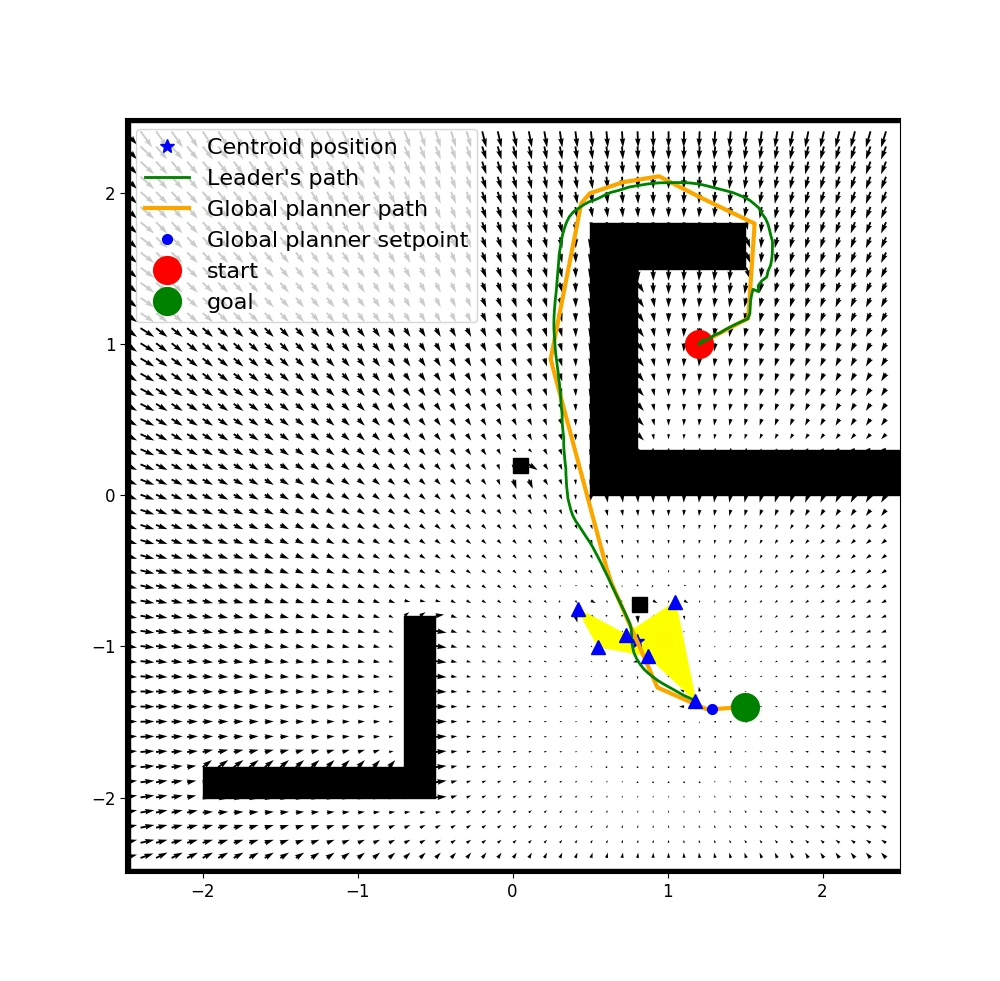
结合应用与效果
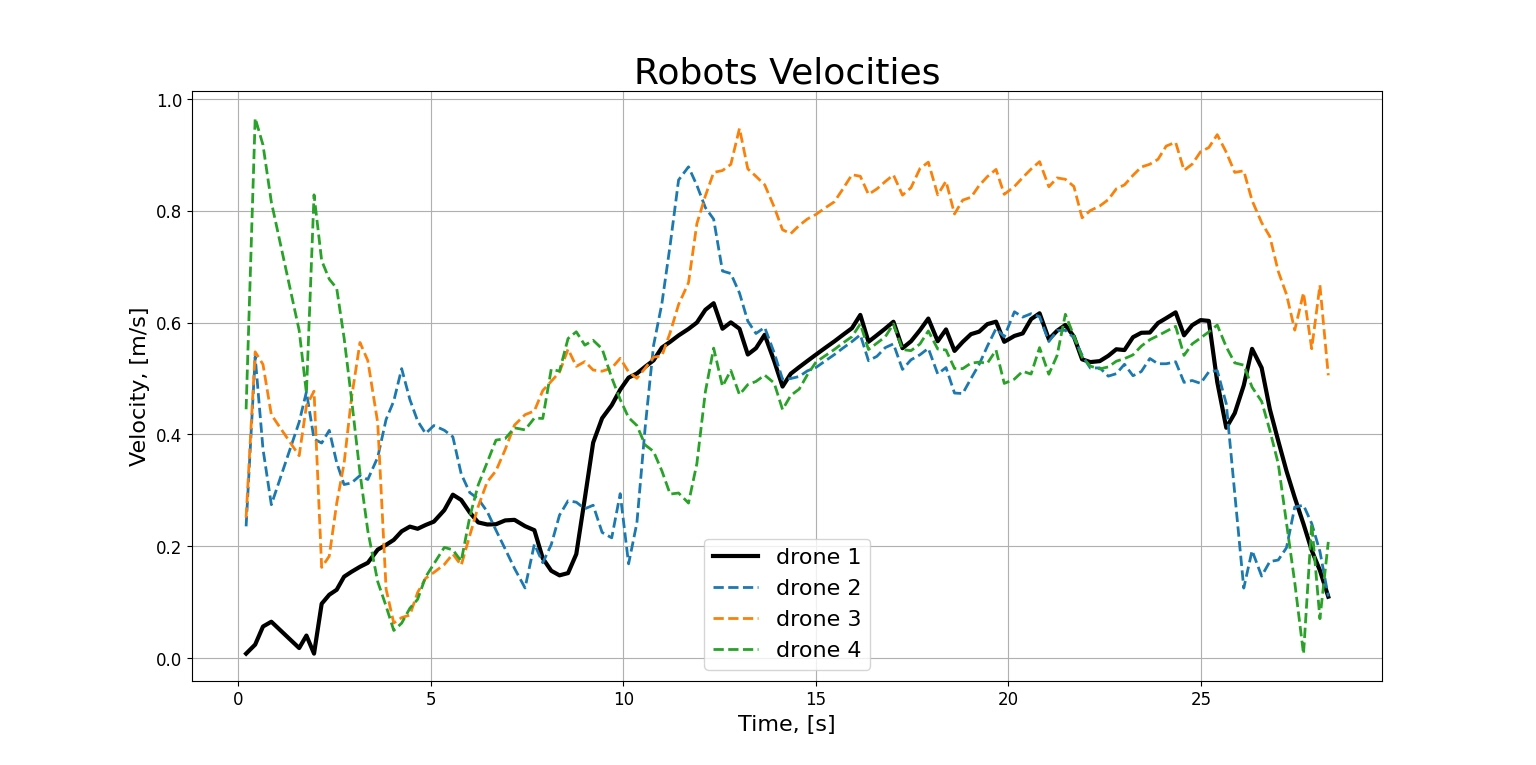
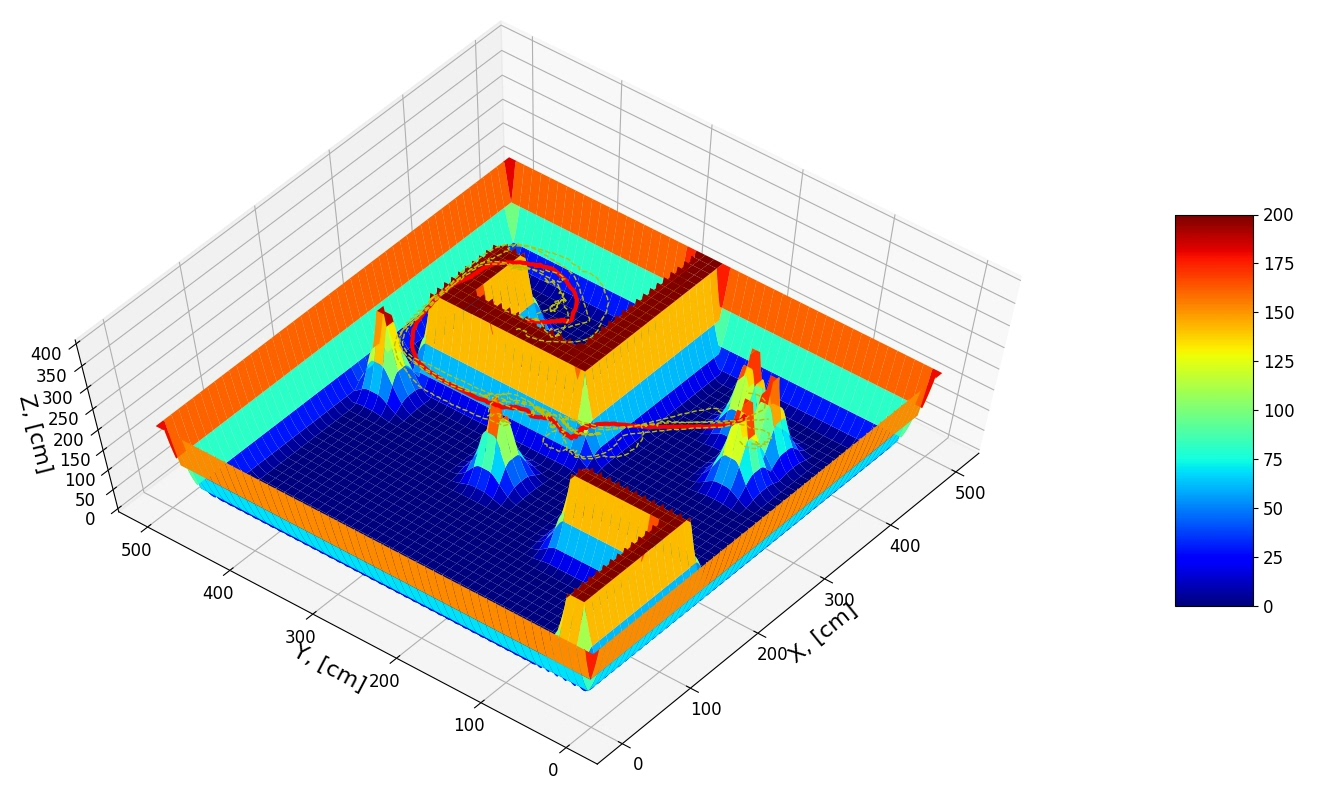
在实际应用中,把这两个算法结合起来,无人机编队就能在各种混乱环境中大展身手啦。通过实验证明,无论是面对静态障碍物,还是移动的障碍物,无人机编队都能精确导航,完成复杂的任务。
这个模型源于国外卡梅隆大学,人家可是有完整代码与paper的哦,还有参考文献可供深入研究。这意味着我们可以站在巨人的肩膀上,进一步探索无人机编队在更多复杂场景中的应用。
想象一下,未来在抢险救灾现场,无人机编队可以利用这个模型,在充满残骸和移动危险的环境中,灵活避障并保持特定的编队形状,高效地完成救援物资投递、情况勘察等任务。这不仅是技术上的突破,更是为实际应用带来了无限可能。
希望今天分享的这个结合RRT与APF的无人机编队动态避障控制模型,能给大家带来一些启发,说不定哪天你也能基于此开发出更厉害的应用呢!