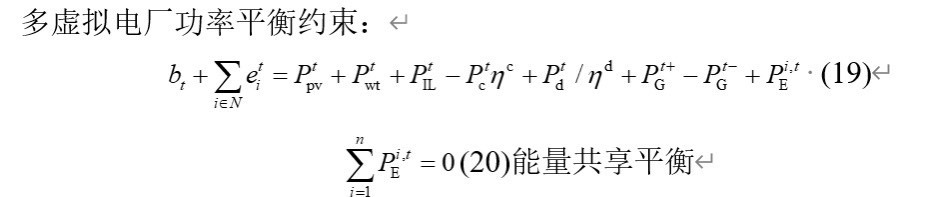
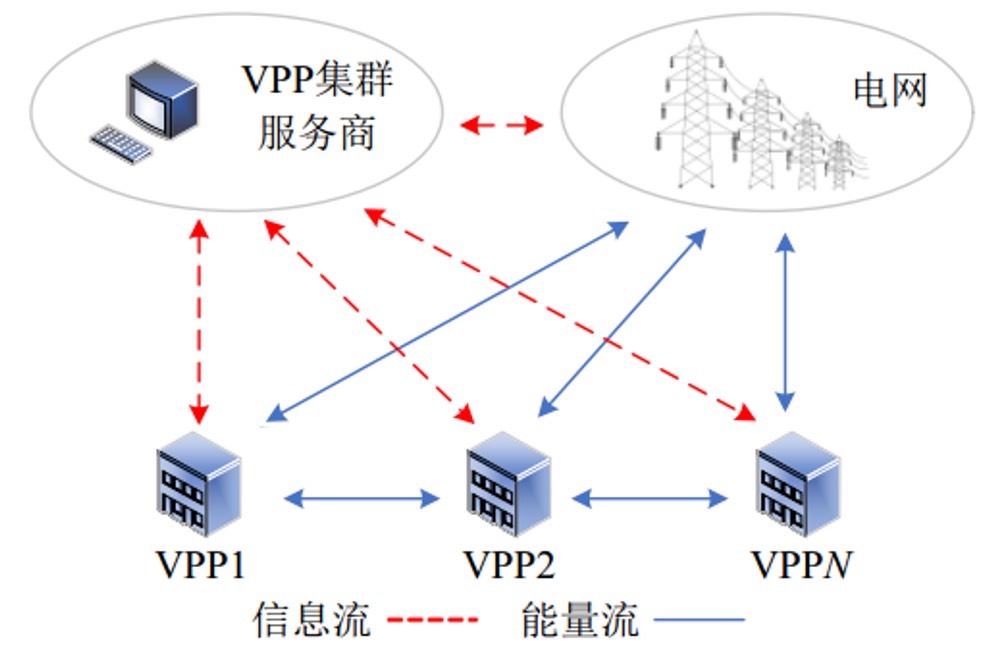
(集中式算法)多虚拟电厂联合调度优化模型,包括电动汽车,柔性负荷等,有建模文件,代码根据文件编写,注释清晰。 可扩展改写性强, 运行平台:matlab+yalmip+cplex 代码一经,不易望理解。
在能源管理领域,多虚拟电厂联合调度优化模型正逐渐成为热门话题。今天咱就唠唠这其中涉及电动汽车、柔性负荷等元素的集中式算法实现,用的平台是 matlab + yalmip + cplex。
建模文件是基石
建模文件为整个代码实现指明了方向。比如说,在考虑电动汽车这一元素时,建模文件会定义电动汽车的充电和放电特性,像充电功率限制、初始电量、不同时段的充放电需求等关键参数。而柔性负荷部分,则会刻画其可调节的范围、调节速度以及不同时段的响应特性。这些细致的模型定义,就像是建筑蓝图,让后续代码编写有的放矢。
Matlab 代码实战
matlab
% 1. 参数定义
% 假设虚拟电厂数量为 N
N = 3;
% 时段数量为 T
T = 24;
% 电动汽车相关参数
EV_charging_rate = 5; % 充电功率 5kW
EV_discharging_rate = 4; % 放电功率 4kW
EV_max_charge = 30; % 最大充电量 30kWh
EV_max_discharge = 20; % 最大放电量 20kWh
% 柔性负荷相关参数
flexible_load_min = 10; % 最小负荷 10kW
flexible_load_max = 50; % 最大负荷 50kW
flexible_load_adjust_rate = 0.2; % 负荷调节速率 20%
% 2. 变量声明
% 虚拟电厂出力
P_VPP = sdpvar(N, T);
% 电动汽车充电量
P_EV_charge = sdpvar(1, T);
% 电动汽车放电量
P_EV_discharge = sdpvar(1, T);
% 柔性负荷调节量
P_flexible_load = sdpvar(1, T);
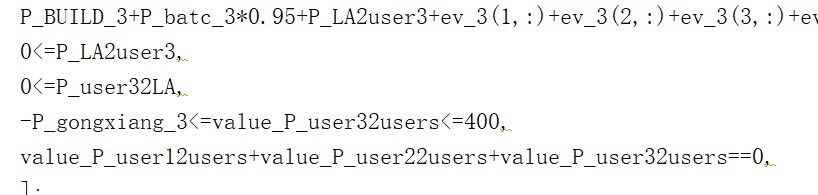
% 3. 约束条件
Constraints = [];
% 虚拟电厂出力限制
for n = 1:N
for t = 1:T
Constraints = [Constraints, P_VPP(n, t) >= 0];
Constraints = [Constraints, P_VPP(n, t) <= 100]; % 假设最大出力 100kW
end
end
% 电动汽车充放电约束
for t = 1:T
Constraints = [Constraints, P_EV_charge(t) >= 0];
Constraints = [Constraints, P_EV_charge(t) <= EV_max_charge];
Constraints = [Constraints, P_EV_discharge(t) >= 0];
Constraints = [Constraints, P_EV_discharge(t) <= EV_max_discharge];
Constraints = [Constraints, P_EV_charge(t) * EV_charging_rate - P_EV_discharge(t) * EV_discharging_rate <= 0]; % 电量平衡约束简化版
end
% 柔性负荷约束
for t = 1:T
Constraints = [Constraints, P_flexible_load(t) >= flexible_load_min];
Constraints = [Constraints, P_flexible_load(t) <= flexible_load_max];
if t > 1
Constraints = [Constraints, abs(P_flexible_load(t) - P_flexible_load(t - 1)) <= flexible_load_max * flexible_load_adjust_rate];
end
end
% 4. 目标函数 - 假设最小化总发电成本
Cost_VPP = sum(sum(P_VPP)); % 简单假设发电成本与出力成正比
Cost_EV = sum(P_EV_charge * 0.5 + P_EV_discharge * 0.3); % 充电和放电成本假设
Cost_flexible_load = sum(P_flexible_load * 0.2); % 柔性负荷调节成本假设
Objective = Cost_VPP + Cost_EV + Cost_flexible_load;
% 5. 求解
ops = sdpsettings('solver', 'cplex');
sol = optimize(Constraints, Objective, ops);
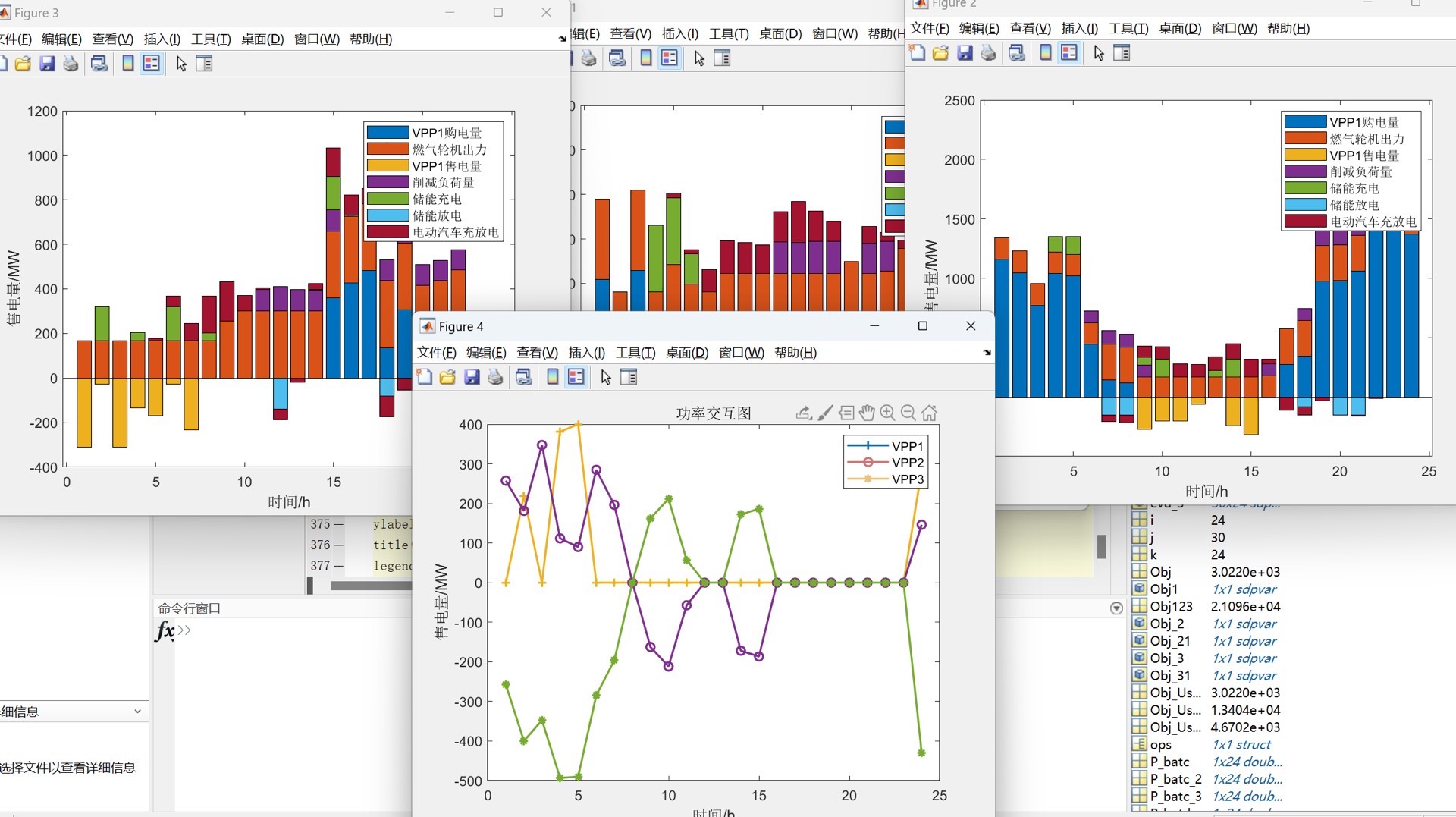
% 6. 结果展示
if sol.problem == 0
disp('优化成功');
disp('虚拟电厂出力:');
disp(value(P_VPP));
disp('电动汽车充电量:');
disp(value(P_EV_charge));
disp('电动汽车放电量:');
disp(value(P_EV_discharge));
disp('柔性负荷调节量:');
disp(value(P_flexible_load));
else
disp('优化失败');
end代码分析
- 参数定义部分 :我们先明确了模型中的各种关键参数,比如虚拟电厂数量
N、时段数量T,以及电动汽车和柔性负荷的特性参数。这一步是为后续变量和约束条件设置做准备。 - 变量声明 :用
sdpvar声明了我们需要求解的变量,包括虚拟电厂出力PVPP*、电动汽车充放电量P*EVcharge**和PEVdischarge*,以及柔性负荷调节量P*flexible_load。这些变量就是模型要找的最优解。 - 约束条件 :
- 虚拟电厂出力限制,保证每个虚拟电厂在各个时段的出力在合理范围内。
- 电动汽车充放电约束,不仅限制了充放电量,还简单考虑了电量平衡。
- 柔性负荷约束,确保负荷在允许范围,并且考虑了调节速率限制。
- 目标函数:这里假设最小化总发电成本,把虚拟电厂发电成本、电动汽车充放电成本和柔性负荷调节成本都加起来。不同成本的权重假设是根据实际情况预估的,实际应用中可以调整。
- 求解与结果展示 :使用
optimize函数,结合cplex求解器,根据我们设定的约束和目标来求解。最后根据求解结果输出相应信息,如果成功就展示各个变量的最优值。
整个模型的代码可扩展改写性强。要是以后考虑更多的虚拟电厂特性,比如不同的发电成本函数,或者更复杂的电动汽车电池寿命损耗模型,都可以在现有基础上轻松修改。
总之,这个多虚拟电厂联合调度优化模型通过合理的建模和代码实现,在 matlab + yalmip + cplex 平台上为能源调度提供了一种有效的解决方案。