非线性电液伺服系统精确模型反步控制。 pdf教程+matlab/simulink源码。 与pid控制对比。
嘿,各位技术宅们!今天咱们要一起钻进非线性电液伺服系统的神秘世界,好好聊聊精确模型反步控制这一厉害的技术,顺便还会把它和经典的PID控制来个大比拼,最后还有超实用的pdf教程以及matlab/simulink源码奉上,干货满满,千万别错过!
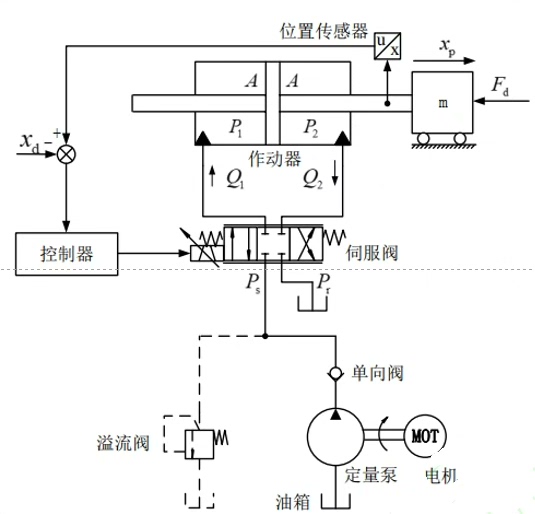
非线性电液伺服系统:为何如此特别
非线性电液伺服系统在现代工业中的地位那可是相当重要,从精密制造到航空航天,到处都有它的身影。然而,它的非线性特性就像个调皮的小精灵,给精确控制带来了不少麻烦。传统的线性控制方法在面对这些复杂的非线性关系时,往往有点力不从心。
PID控制:经典但有时也无奈
PID控制,这个大家耳熟能详的经典控制策略,在很多场景下都表现出色。它通过比例(P)、积分(I)、微分(D)三个环节的配合,能够有效地对系统进行调节。咱们来看段简单的PID控制代码示例(以Python为例,假设用control库来模拟简单系统):
python
import control
import matplotlib.pyplot as plt
# 定义系统传递函数
num = [1]
den = [1, 1, 0]
sys = control.TransferFunction(num, den)
# 设置PID参数
kp = 1
ki = 0.1
kd = 0.01
kp_term = control.TransferFunction([kp], [1])
ki_term = control.TransferFunction([ki], [1, 0])
kd_term = control.TransferFunction([kd, 0], [1])
pid = kp_term + ki_term + kd_term
# 闭环系统
cl_sys = control.feedback(pid * sys, 1)
# 仿真
t, y = control.step_response(cl_sys)
# 绘图
plt.plot(t, y)
plt.xlabel('Time (seconds)')
plt.ylabel('Response')
plt.title('PID Control Step Response')
plt.grid(True)
plt.show()这段代码首先定义了一个简单的系统传递函数,然后设置了PID的参数,构建出PID控制器,并将其与系统组成闭环,最后通过step_response函数来观察系统的阶跃响应。PID控制的优点是结构简单、易于实现,但是在非线性电液伺服系统中,由于系统的非线性特性,PID控制可能无法达到很高的控制精度,它就像一个标准的"好学生",按部就班,但面对复杂多变的情况,可能就应付不来了。
反步控制:精确控制的新希望
反步控制(Backstepping Control)则为非线性电液伺服系统的精确控制带来了新的曙光。它的核心思想是通过逐步构造Lyapunov函数,来设计控制器,从而保证系统的稳定性和跟踪性能。下面咱们用Matlab代码来大概展示下反步控制在非线性电液伺服系统模型中的应用思路(简化示例,实际模型会复杂得多):
matlab
% 定义系统参数
m = 1; % 质量
b = 0.1; % 阻尼系数
k = 1; % 弹簧系数
% 定义符号变量
syms x1 x2 u real
x = [x1; x2];
% 系统动力学方程
xdot1 = x2;
xdot2 = (1/m) * (-b*x2 - k*x1 + u);
xdot = [xdot1; xdot2];
% 设计反步控制器
V1 = 0.5 * x1^2;
alpha1 = 0;
V1_dot = diff(V1, x1) * xdot1;
V2 = V1 + 0.5 * (x2 - alpha1)^2;
u = -diff(V2, x2) * xdot2 - diff(V2, x1) * xdot1;
% 转换为数值函数
xdot_func = matlabFunction(xdot, 'Vars', {x, u});
u_func = matlabFunction(u, 'Vars', {x});
% 仿真设置
tspan = 0:0.01:10;
x0 = [1; 0];
options = odeset('RelTol',1e-6,'AbsTol',1e-9);
% 仿真求解
[t, xsol] = ode45(@(t, x) xdot_func(x, u_func(x)), tspan, x0, options);
% 绘图
figure;
subplot(2,1,1);
plot(t, xsol(:,1));
xlabel('Time (s)');
ylabel('x1');
title('State x1');
subplot(2,1,2);
plot(t, xsol(:,2));
xlabel('Time (s)');
ylabel('x2');
title('State x2');这段Matlab代码首先定义了一个简单的非线性电液伺服系统模型(这里简化为包含质量、阻尼和弹簧的系统),然后利用符号运算来设计反步控制器。通过逐步构建Lyapunov函数(V1和V2),得到控制输入u。最后使用ode45函数对系统进行数值仿真求解,并绘制出系统状态的变化曲线。反步控制能够更好地处理非线性特性,它像是一个灵活的"高手",能够根据系统的复杂情况做出更智能的调整。
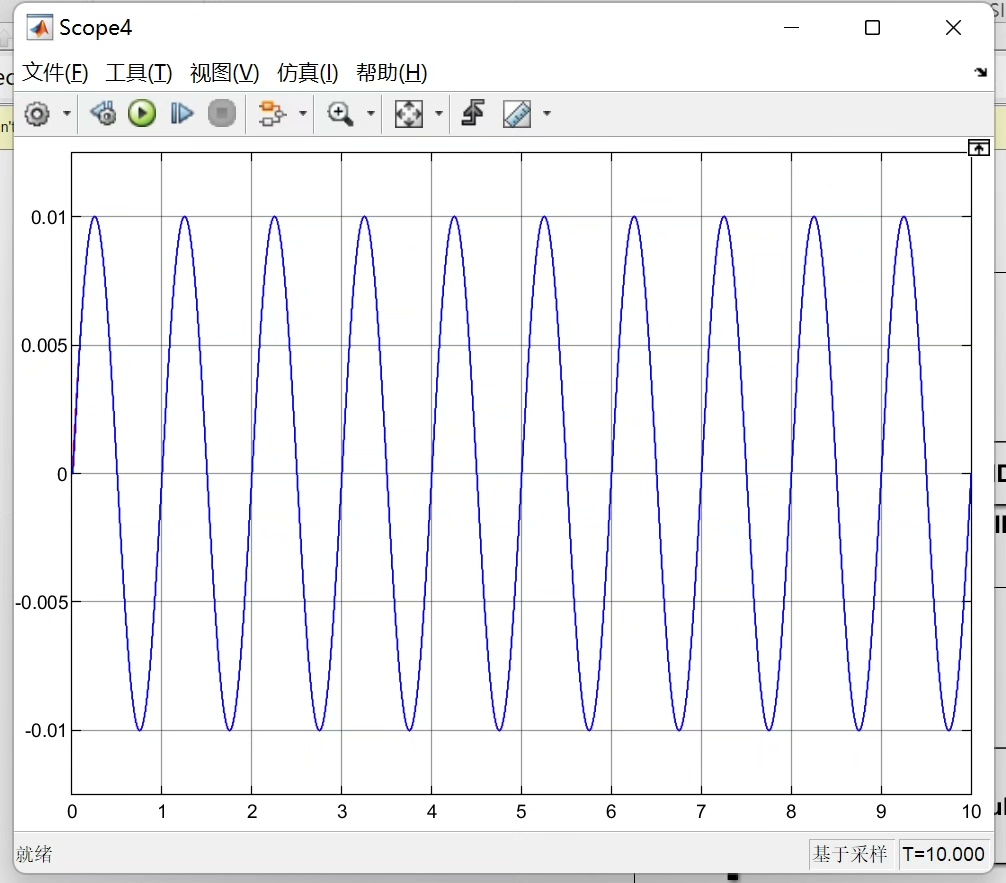
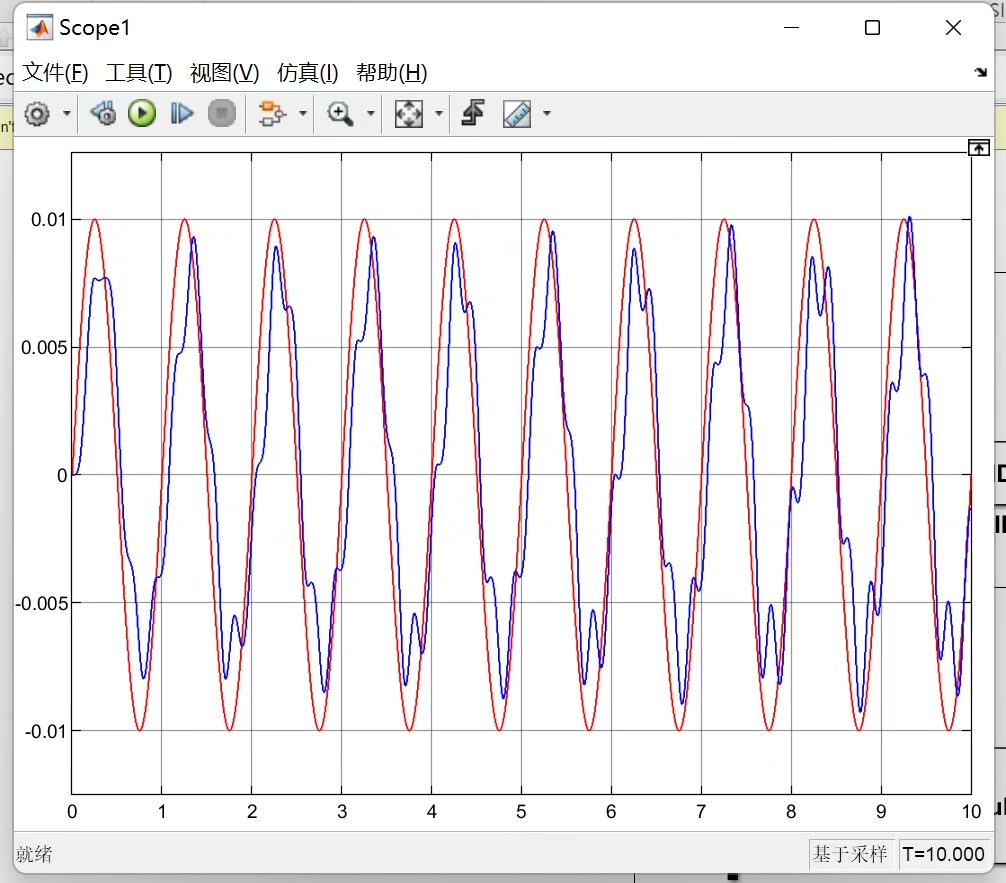
对比与结论
通过实际的代码示例和仿真,我们可以明显看出,PID控制在简单线性系统或者对精度要求不是极高的场景下表现不错,但在非线性电液伺服系统这种复杂的环境中,反步控制能够实现更高的控制精度和更好的系统性能。不过,反步控制的设计相对复杂,需要对系统的数学模型有深入的理解。
福利:pdf教程与matlab/simulink源码
为了让大家更深入地学习和实践,我准备了详细的pdf教程,里面会更全面地讲解非线性电液伺服系统的精确模型反步控制理论,以及与PID控制的对比分析。同时,还有完整的matlab/simulink源码,大家可以直接在自己的电脑上进行仿真实验,进一步探索这两种控制策略的奥秘。
希望今天的分享能让大家对非线性电液伺服系统的控制有新的认识,赶紧下载资料,动手实践起来吧!如果在学习过程中有任何问题,欢迎在评论区留言交流。咱们下次技术探索再见!