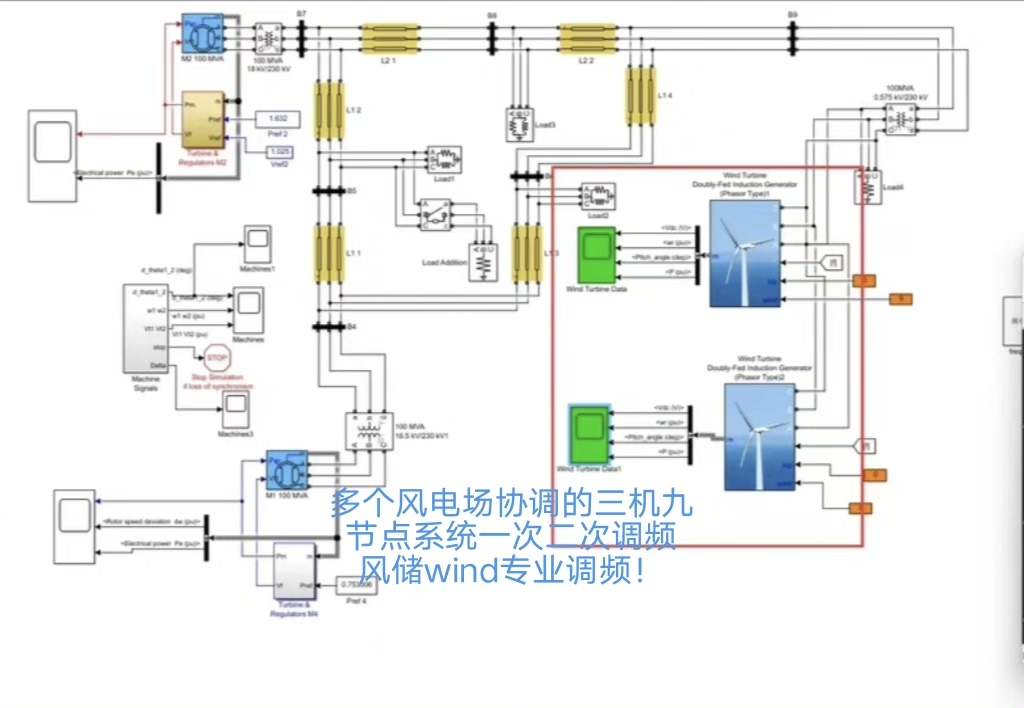
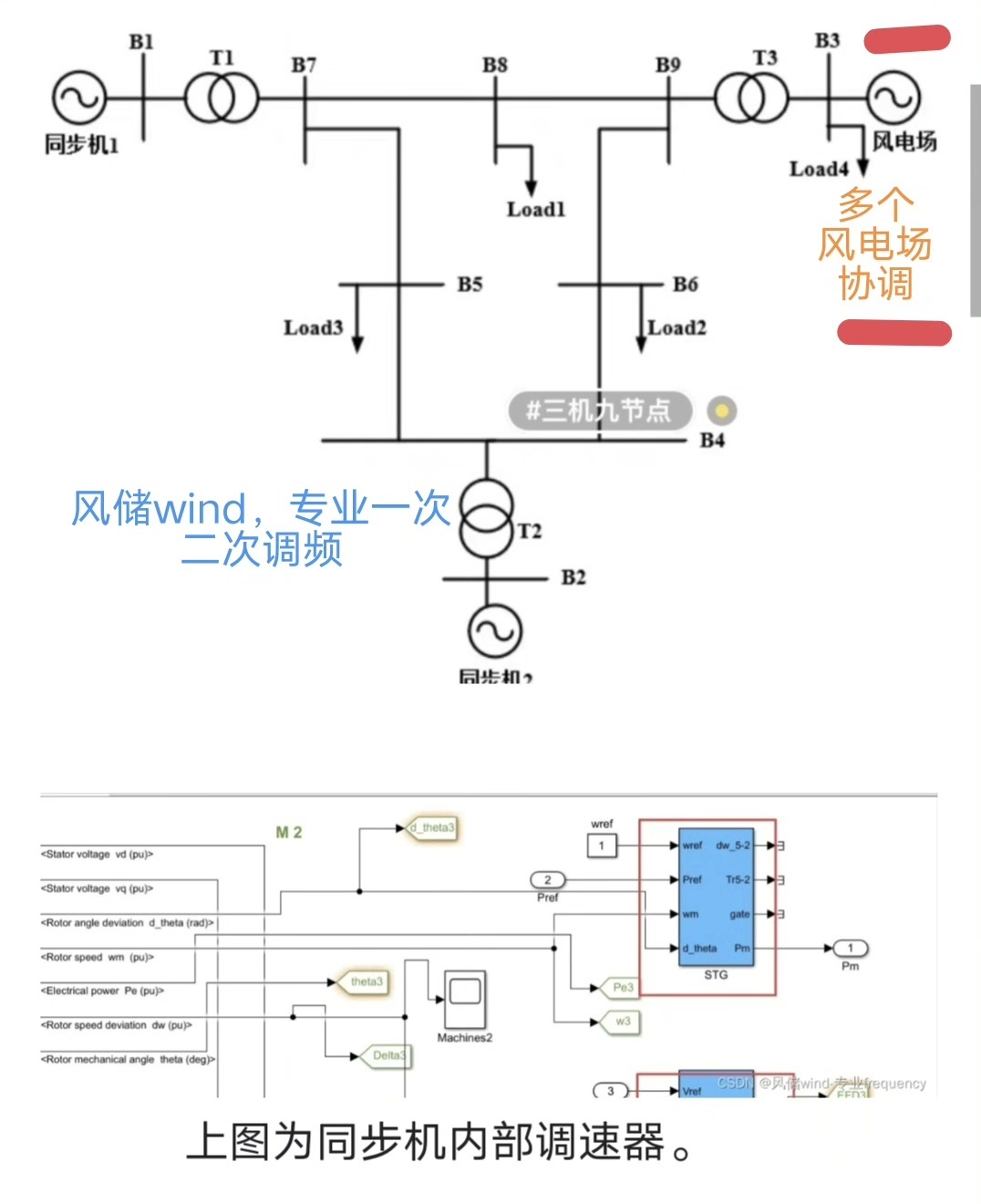
matlab/simulink多风电场协调的虚拟惯性,下垂控制一次调频,风电渗透率可调,目前为20%。 所有参数均设计好,可直接运行。 可加入超速减载,变桨控制,频率二次跌落转速回复设计。 多个风电场协调更符合实际,与单机等值风电场相比,可考虑风速差异,更能模拟实际风电场。 不同频率控制方法的频率特性如图所示。
在电力系统研究领域,随着风电规模的不断扩大,风电场的频率控制成为一个关键课题。今天咱们就来聊聊基于Matlab/Simulink的多风电场协调虚拟惯性以及相关的调频控制策略,目前风电渗透率设定为20% 。
多风电场协调的优势
实际中的风电场往往是多个分布的,多个风电场协调控制相比单机等值风电场更贴合实际情况。因为不同地理位置的风电场风速存在差异,这种差异对风电输出功率有着显著影响。比如在Matlab/Simulink模型搭建中,可以利用随机数结合地理信息来模拟不同风电场的风速:
matlab
% 假设三个风电场,风速范围为[5, 25] m/s
windSpeed1 = 5 + 20 * rand(1);
windSpeed2 = 5 + 20 * rand(1);
windSpeed3 = 5 + 20 * rand(1); 上述代码简单生成了三个不同风电场随机风速,这有助于我们模拟真实场景下风速的时空变化,进而更好研究多风电场联合运行时的特性。
虚拟惯性与下垂控制一次调频
虚拟惯性控制可以使风电机组像传统同步发电机一样提供惯性响应,增强系统频率稳定性。下垂控制则是根据系统频率偏差来调节风电机组的有功功率输出。以下是一个简单下垂控制代码示意:
matlab
% 下垂系数设置
R = 0.05;
% 额定频率
f_nom = 50;
% 实时测量频率
f_measured = 49.8;
% 计算有功功率参考值变化量
deltaP = (f_nom - f_measured) / R; 这里通过下垂系数R和频率偏差计算出有功功率参考值的变化量deltaP ,风电机组根据这个值调整自身功率输出,从而参与系统的一次调频。
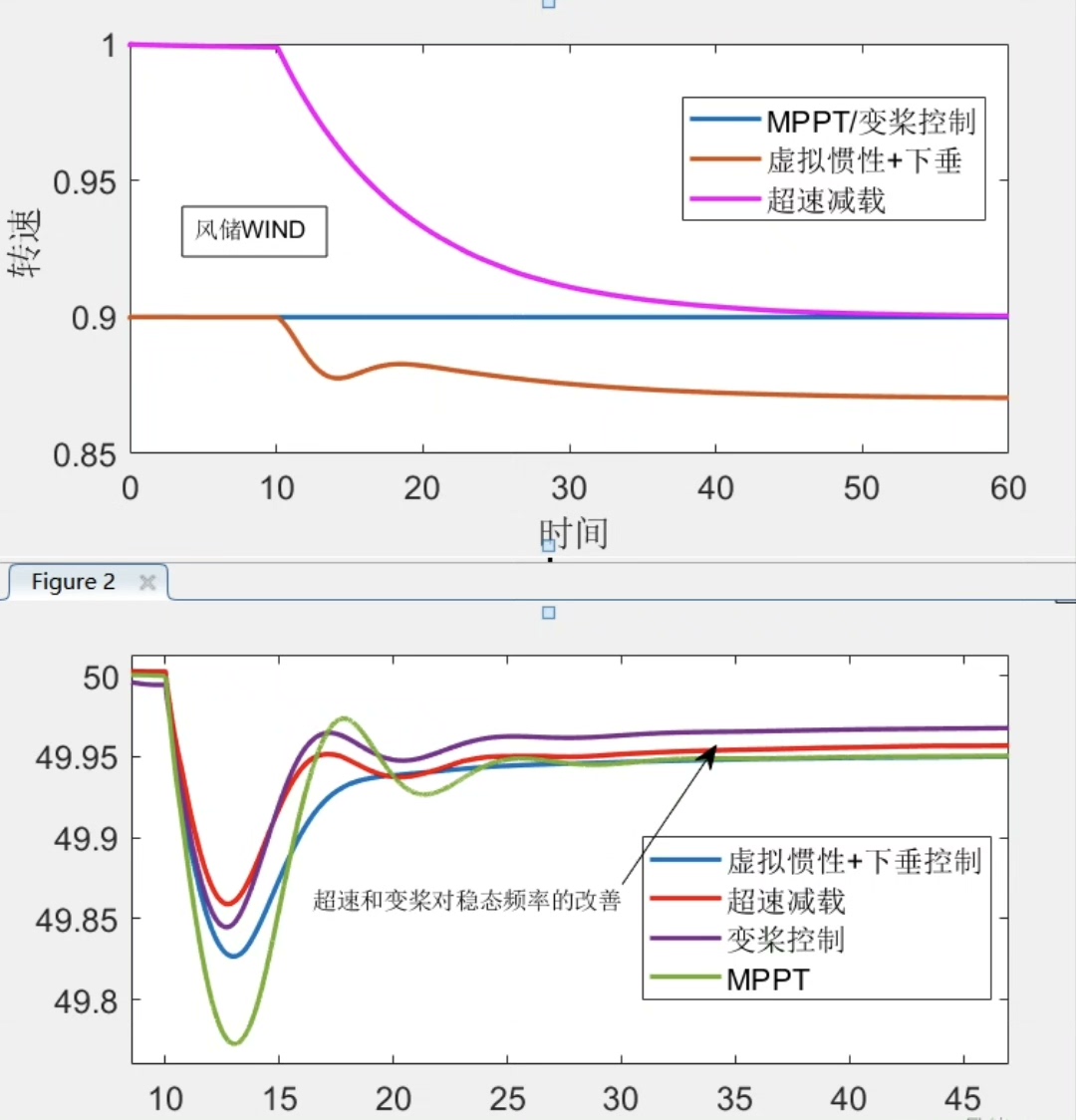
超速减载、变桨控制与频率二次跌落转速回复设计
超速减载策略在系统频率快速下降时,通过快速减少风电机组的有功输出,避免系统频率过度跌落。例如:
matlab
if f_measured < 49.5
% 执行超速减载
P_out = P_out * 0.8;
end当频率低于49.5Hz时,风电机组输出功率降低至原来的80%。
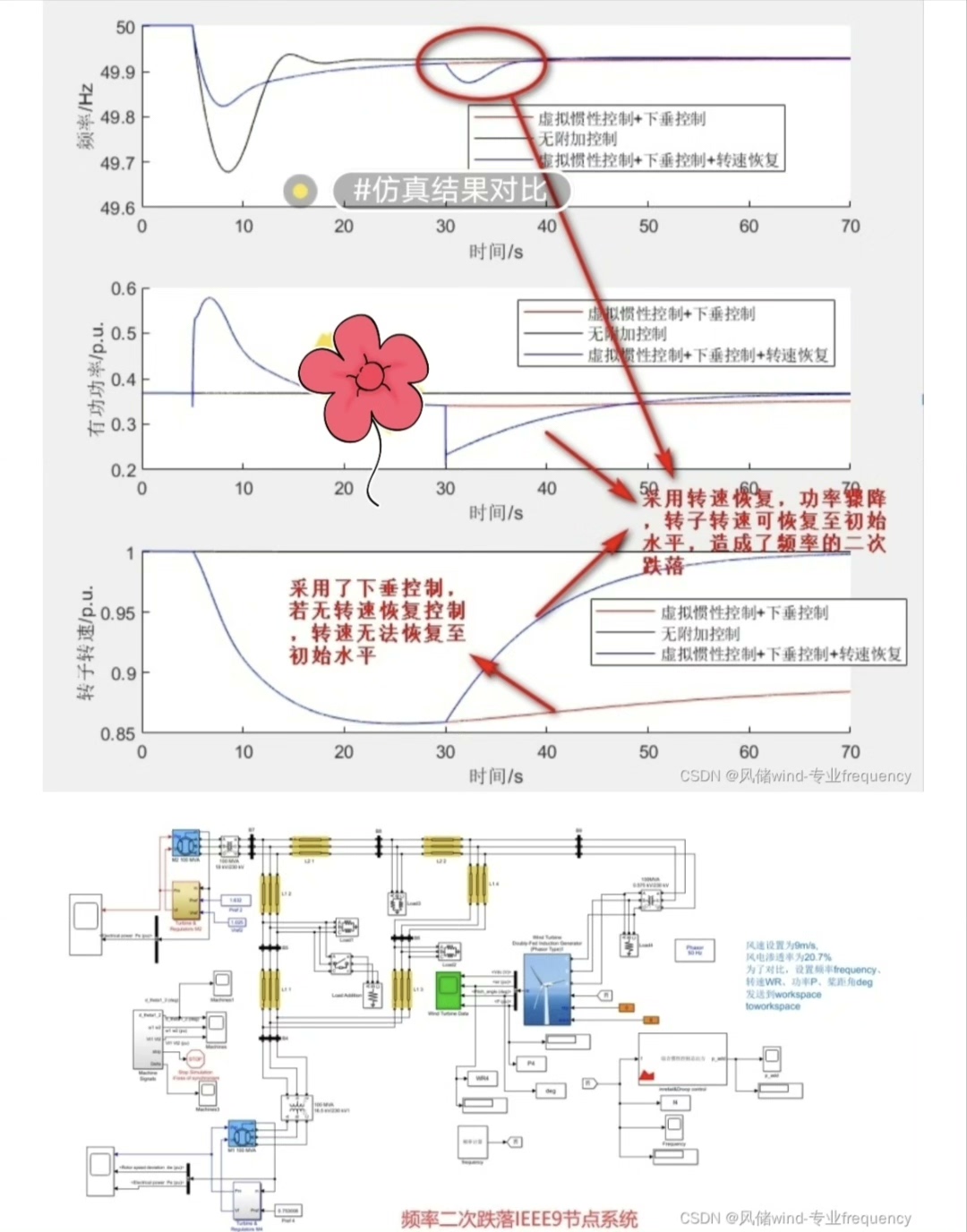
变桨控制通过调整叶片桨距角,改变风电机组捕获的风能,达到调节功率的目的。而频率二次跌落转速回复设计是在一次调频后,针对可能出现的频率二次跌落情况,进一步调整风电机组转速,恢复系统频率稳定。
不同频率控制方法的频率特性
从我们搭建的Matlab/Simulink模型仿真结果来看,不同频率控制方法呈现出各异的频率特性。虚拟惯性控制能够快速提供惯性响应,抑制频率的初始变化速率;下垂控制则能根据频率偏差持续调节功率,使频率稳定在一定范围内。而超速减载、变桨控制等策略在不同阶段对频率的稳定和恢复起到重要作用。通过观察不同控制方法下频率变化曲线(可在Simulink示波器中直观看到),我们可以清晰对比各方法的优劣,从而为实际电力系统风电场控制策略的选择提供有力依据。
在本次基于Matlab/Simulink的研究中,所有参数都已设计好,模型可直接运行,方便大家深入探究多风电场协调控制下的频率稳定问题,希望能为风电领域的小伙伴们带来一些思路和启发。