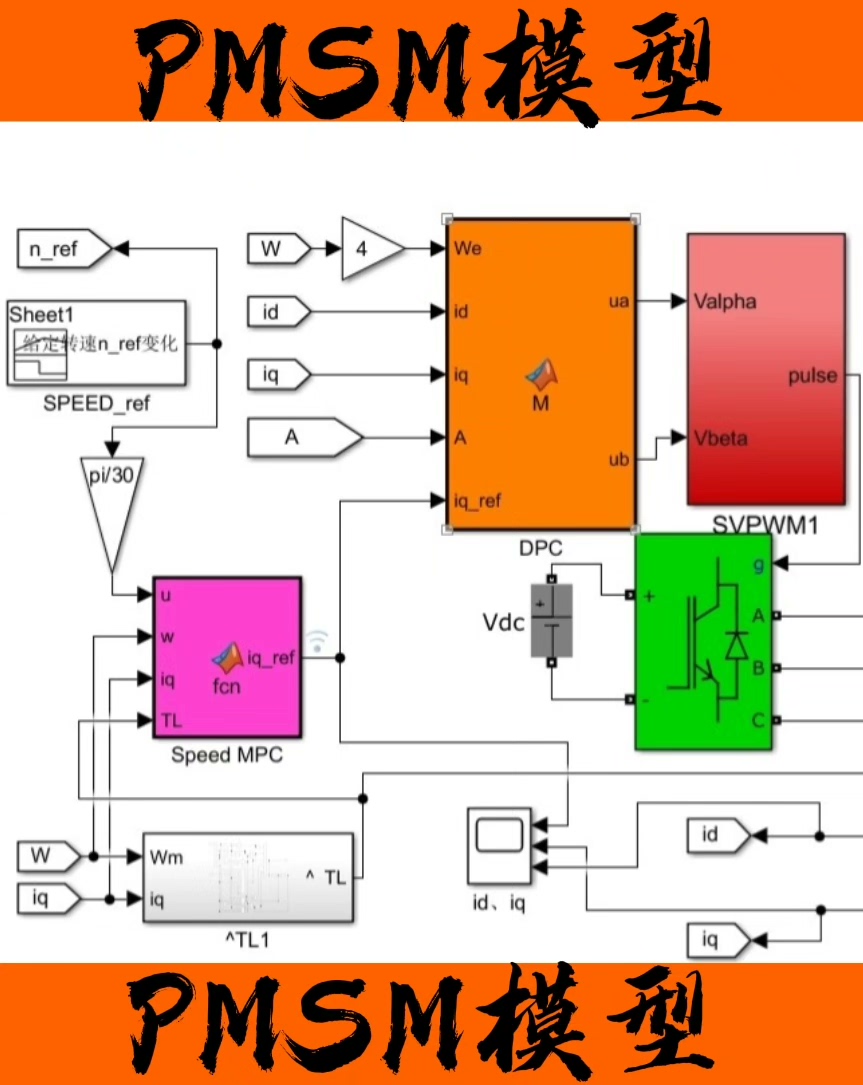
基于扰动观测器的永磁同步电机(PMSM)模型预测控制(MPC)仿真 速度外环基于模型预测控制、电流内环基于无差拍控制搭建,控制效果理想,模块程序设计通俗易通
在电机控制领域,永磁同步电机(PMSM)因其高效、节能等优点被广泛应用。而如何实现对PMSM更精准、高效的控制一直是研究的热点。今天就来聊聊基于扰动观测器的PMSM模型预测控制(MPC)仿真相关内容。

这次的控制策略中,速度外环基于模型预测控制,电流内环基于无差拍控制搭建,实际效果还挺理想,而且模块程序设计通俗易懂,这对于我们深入理解和实践都很友好。
速度外环 - 模型预测控制(MPC)
模型预测控制是一种基于模型的先进控制策略,它通过预测系统未来的行为,并根据优化目标来计算当前的控制输入。
简单说,在速度外环MPC里,我们首先要建立PMSM的离散时间模型。比如,假设我们已经有了如下离散时间状态方程:
python
# 这里以Python代码简单示意状态方程离散化,实际可能会结合电机参数在其他环境下更严谨推导
A = np.array([[1, Ts], [0, 1 - B * Ts / J]])
B = np.array([[0], [Kt * Ts / J]])这里A和B就是离散化后的状态矩阵和输入矩阵,Ts是采样时间,J是转动惯量,B是粘滞摩擦系数,Kt是转矩系数。
接下来就是预测环节,我们要预测未来几个时刻的速度:
python
# 预测未来N个时刻的速度
def predict_speed(x, u, A, B, N):
x_pred = np.zeros((2, N))
x_pred[:, 0] = x
for k in range(1, N):
x_pred[:, k] = A @ x_pred[:, k - 1] + B @ u
return x_pred这里x是当前状态,u是控制输入。通过这个函数,我们就可以预测出未来N个时刻的速度。然后根据预测结果和目标值,通过优化算法来计算当前的控制输入。
电流内环 - 无差拍控制
电流内环采用无差拍控制,它的优势在于能够快速跟踪电流指令。无差拍控制的核心思想是根据系统模型预测下一时刻的状态,并在当前时刻施加合适的控制量,使得下一时刻的输出恰好等于给定值。
以三相PMSM为例,假设已知电机的电压方程和磁链方程,我们可以推导出无差拍控制的电压指令计算公式。
matlab
% 这里以Matlab代码示意无差拍控制电压指令计算
% 已知电机参数和当前电流、磁链等
Rs = 0.1; % 定子电阻
Ld = 0.008; % d轴电感
Lq = 0.008; % q轴电感
psi_f = 0.175; % 永磁体磁链
omega_r = 100; % 转子电角速度
% 当前电流
id = 0;
iq = 1;
% 计算无差拍控制电压指令
vd = -Rs * id + Lq * omega_r * iq;
vq = -Rs * iq - Ld * omega_r * id + omega_r * psi_f;这里计算出的vd和vq就是施加到电机的d轴和q轴电压指令,通过这样的计算,能快速地让电流跟踪上指令值。
扰动观测器的作用
在实际运行中,PMSM会受到各种扰动,比如负载变化等。扰动观测器就像是一个"侦察兵",能够实时观测到这些扰动,并将其补偿到控制量中。
以基于扩张状态观测器(ESO)的扰动观测为例,我们可以设计如下形式的ESO:
python
# Python代码示意ESO基本结构
beta1 = 300
beta2 = 3000
beta3 = 10000
z1 = 0
z2 = 0
z3 = 0
def eso(y, u):
global z1, z2, z3
e = z1 - y
z1 = z1 - Ts * (z2 - beta1 * e)
z2 = z2 - Ts * (z3 - beta2 * e + 1.5 * u)
z3 = z3 - Ts * beta3 * e
return z3这里y是系统输出(比如速度或电流),u是控制输入。通过ESO实时估计出扰动z3,然后在控制算法中对其进行补偿,从而提高系统的抗干扰能力。
通过这样速度外环MPC、电流内环无差拍控制,再结合扰动观测器的设计,整个PMSM控制系统不仅控制效果理想,而且模块程序设计清晰易懂,方便我们进一步学习和优化。无论是深入研究电机控制理论,还是实际工程应用,都能从这样的架构中获得不少启发。