控制电机-感应电动机转差型矢量控制伺服模型系统 仿真模型+实验报告(内附实验参数,仿真波形等) 注意:matlab版本需在2016a以下,否则可能打不开
在电机控制领域,感应电动机转差型矢量控制伺服模型系统是一个相当关键且有趣的研究方向。今天咱就来唠唠这个系统,还会分享下对应的仿真模型以及实验报告相关内容。
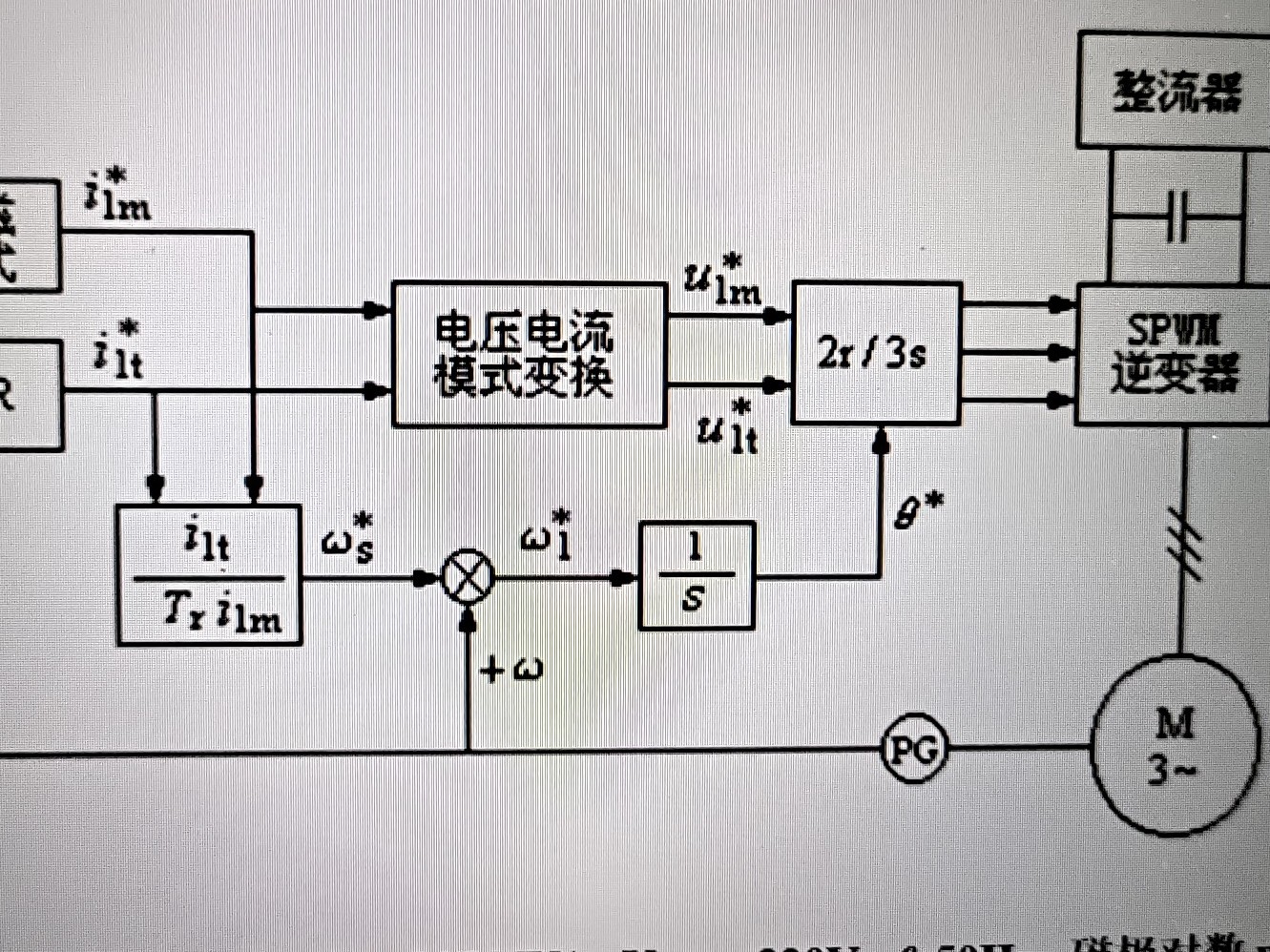
一、感应电动机转差型矢量控制原理
简单来讲,转差型矢量控制旨在通过对感应电动机的磁场和转矩分别进行独立控制,实现高性能的调速运行。其核心思路是将定子电流分解为产生磁场的励磁电流分量和产生转矩的转矩电流分量,这样就能像精准操控两个不同的旋钮一样,分别调节磁场和转矩,达到更灵活高效的电机控制效果。
在数学模型上,我们会涉及到一堆电机相关的参数和方程。例如,定子电流的矢量表示:
matlab
% 假设已经获取到定子电流的幅值和相位
Is_mag = 5; % 定子电流幅值
Is_theta = pi/4; % 定子电流相位
Is = Is_mag * (cos(Is_theta) + 1i * sin(Is_theta));这里简单创建了一个定子电流的复数表示,实际应用中这个电流值是由电机运行状态和控制算法动态确定的。通过这种矢量表示,我们能更好地在后续计算中对电流的不同分量进行处理,以实现磁场和转矩的分别控制。
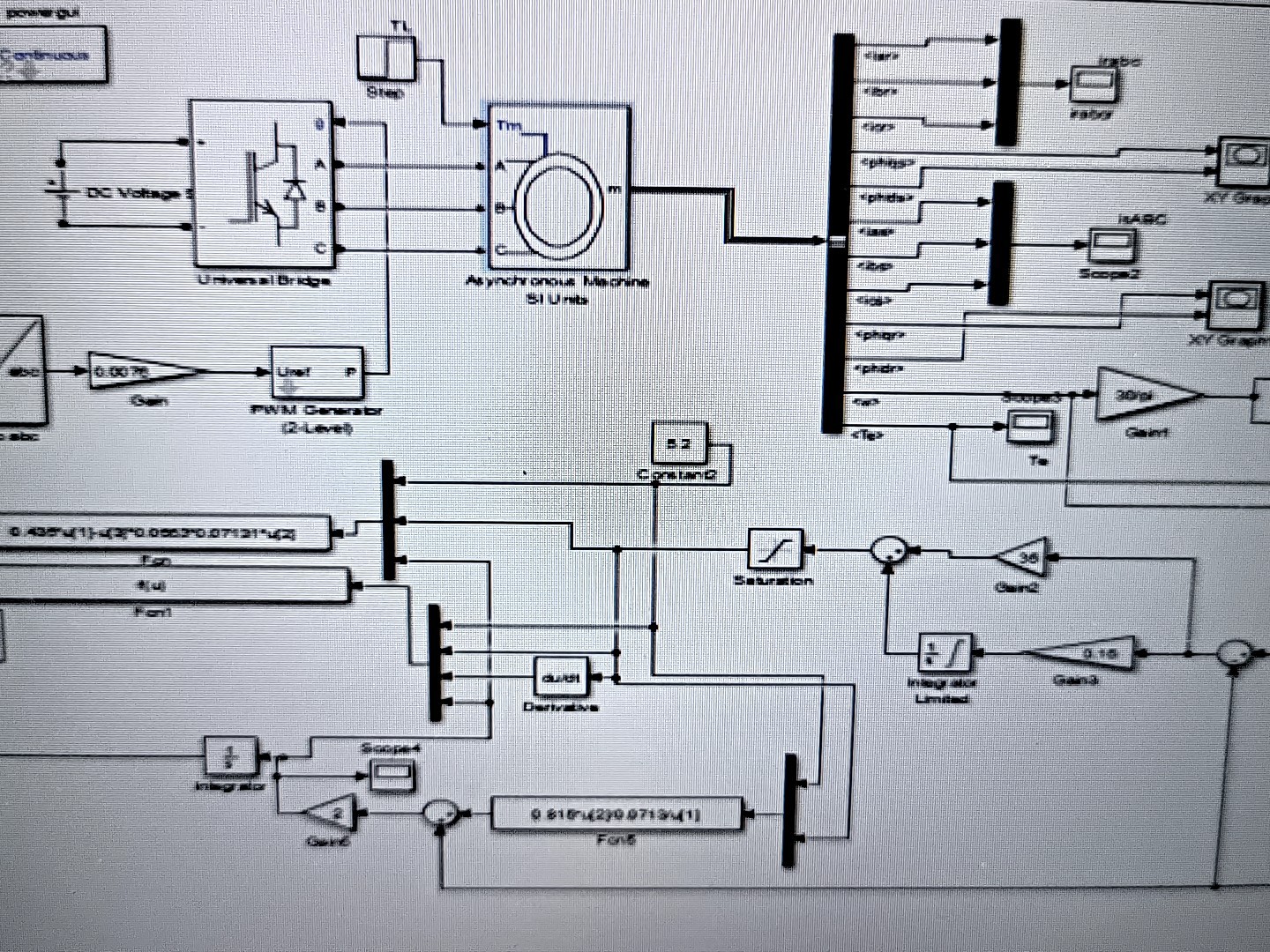
二、Matlab仿真模型搭建
咱得在Matlab环境下搭建这个仿真模型,不过要注意,Matlab版本需在2016a以下,不然可能打不开。咱先从电机模型的搭建开始。
matlab
% 定义电机参数
R_s = 1; % 定子电阻
R_r = 0.8; % 转子电阻
L_s = 0.1; % 定子自感
L_r = 0.1; % 转子自感
L_m = 0.09; % 互感
J = 0.01; % 转动惯量
p = 2; % 极对数
% 搭建电机模型
motor =感应电动机模型('StatorResistance',R_s,'RotorResistance',R_r,...
'StatorInductance',L_s,'RotorInductance',L_r,'MutualInductance',L_m,...
'Inertia',J,'PolePairs',p);上面这段代码就是在Matlab里定义了感应电动机的一些基本参数,并据此搭建了电机模型。这些参数对于电机的性能模拟至关重要,不同的参数值会让电机在仿真中的表现大不一样。
接下来就是搭建转差型矢量控制模块。
matlab
% 搭建转差型矢量控制模块
speed_ref = 1000; % 速度参考值(rpm)
omega_ref = speed_ref * 2 * pi / 60; % 转换为rad/s
controller =转差型矢量控制器('SpeedReference',omega_ref,...
'StatorResistance',R_s,'RotorResistance',R_r,'StatorInductance',L_s,...
'RotorInductance',L_r,'MutualInductance',L_m,'PolePairs',p);这里定义了速度参考值,并将其转换为弧度每秒的单位,然后据此搭建了转差型矢量控制器。这个控制器会根据给定的速度参考值和电机实时反馈的状态信息,计算出合适的控制信号,去调节电机的运行。
将电机模型和控制器连接起来,再设置好仿真参数,就可以进行仿真啦。
三、实验报告
实验参数
- 电机参数:和仿真模型里定义的类似,定子电阻、转子电阻、各种电感、转动惯量以及极对数等。
- 控制参数:速度参考值设定为1000rpm,还有控制器中的一些PI调节参数等。
仿真波形
仿真运行后,我们能得到各种波形。比如速度波形,可以清晰看到电机从启动到稳定运行过程中速度是如何变化的。
matlab
figure;
plot(simulationData.time, simulationData.speed);
xlabel('时间 (s)');
ylabel('速度 (rad/s)');
title('电机速度响应波形');通过这段代码,我们在Matlab里绘制出了速度波形。从波形上能直观地看出电机速度是否能快速稳定地达到参考值,以及在运行过程中有没有波动等情况,以此来评估控制算法的性能。
通过对感应电动机转差型矢量控制伺服模型系统的仿真和实验,我们能更深入地理解电机控制的原理和实现方式,也为实际应用中的电机控制优化提供了重要参考。希望这篇博文能对各位在这个领域探索的朋友有所帮助。