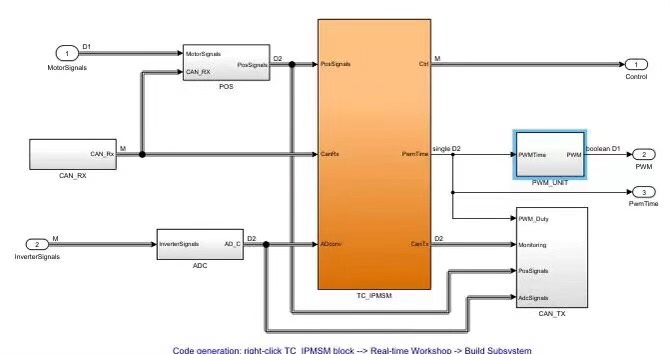
博世汽车电驱仿真模型,同步电机和异步电机模型,相电流完美波形 博世汽车电驱仿真模型,同步电机和异步电机模型,相电流完美波形,自动计算弱磁模型调用各种脚本进行foc控制,正反转切换电流无波动
在汽车电驱领域,博世的仿真模型一直是众多工程师关注的焦点。今天咱们就来深入探讨一下博世汽车电驱仿真模型里的同步电机和异步电机模型,以及与之紧密相关的相电流完美波形、弱磁模型计算和 FOC 控制等酷炫的技术。
同步电机与异步电机模型
同步电机和异步电机在博世汽车电驱仿真模型中扮演着关键角色。同步电机以其转速与电源频率严格同步的特性,常用于对转速精度要求极高的场景。而异步电机则凭借结构简单、成本低等优势,在许多常规驱动应用中广泛使用。
先来看段简单的电机模型初始化代码(以 Python 为例,仅为示意,非实际博世模型代码):
python
class Motor:
def __init__(self, type, rated_power, rated_speed):
self.type = type
self.rated_power = rated_power
self.rated_speed = rated_speed
synchronous_motor = Motor('synchronous', 100, 3000)
asynchronous_motor = Motor('asynchronous', 80, 2800)这段代码简单构建了电机类,并分别实例化了同步电机和异步电机。type 属性区分了电机类型,ratedpower**和 rated speed 定义了电机的额定功率和转速。在实际的博世模型中,电机模型会更加复杂,涵盖电磁、机械等多方面的精确参数。
相电流完美波形
相电流完美波形是衡量电机性能的重要指标。在博世模型里,实现相电流完美波形可不是件容易事。要知道,电机运行过程中,电流波形会受到多种因素影响,比如电机负载、电源谐波等。
以同步电机为例,为了得到完美的相电流波形,在控制算法中需要精确调整电压矢量。这里简单示意一下 FOC 控制算法中涉及相电流控制的代码片段(同样是简化示意):
python
import math
def foc_control(angle, current_ref, motor_params):
# 计算电压矢量角度
alpha = angle
beta = angle + math.pi/2
# 根据电流参考值和电机参数计算电压分量
v_alpha = current_ref * motor_params['resistance'] + motor_params['inductance'] * (d_id_dt + omega * current_ref)
v_beta = current_ref * motor_params['resistance'] + motor_params['inductance'] * (d_iq_dt + omega * current_ref)
# 反 Park 变换得到三相电压
v_a = v_alpha * math.cos(alpha) - v_beta * math.sin(alpha)
v_b = v_alpha * math.cos(alpha - 2*math.pi/3) - v_beta * math.sin(alpha - 2*math.pi/3)
v_c = v_alpha * math.cos(alpha + 2*math.pi/3) - v_beta * math.sin(alpha + 2*math.pi/3)
return v_a, v_b, v_c这段代码通过 FOC 控制算法,依据电机转子角度 angle、电流参考值 currentref**和电机参数 motor params 来计算三相电压。合理调整这些电压,就能让相电流趋近完美波形,从而提升电机效率和性能。
自动计算弱磁模型
在博世汽车电驱仿真模型中,自动计算弱磁模型是一大亮点。弱磁控制在高速运行时对电机性能提升至关重要。当电机转速升高到一定程度,通过弱磁控制可以拓宽电机的调速范围。
下面简单模拟一下弱磁模型计算(依旧是简化示例):
python
def weak_magnetic_calculation(speed, rated_speed, rated_flux):
if speed > rated_speed:
flux = rated_flux * (rated_speed / speed)
else:
flux = rated_flux
return flux这段代码根据电机当前转速 speed 和额定转速 rated_speed 来计算弱磁情况下的磁通 flux。当转速超过额定转速,磁通会相应降低,以此实现弱磁控制。博世模型中的弱磁计算会结合更多实际因素,比这个示例要复杂得多。
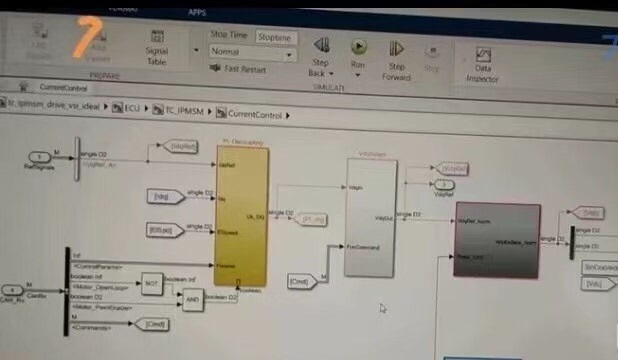
调用各种脚本进行 FOC 控制与正反转切换
博世模型通过调用各种脚本进行 FOC(磁场定向控制),这是现代电机控制的核心技术之一。FOC 能将交流电机的控制等效为直流电机控制,大大提高控制精度。
而正反转切换电流无波动更是博世模型的卓越之处。在实际车辆行驶中,电机正反转切换频繁,如果电流波动大,不仅影响驾驶体验,还可能损坏电机。通过优化的 FOC 控制脚本,能实现正反转过程中电流的平稳过渡。
python
# 假设存在一个函数用于正反转切换
def reverse_direction(motor, current_control):
# 改变电机旋转方向相关设置
motor.rotation_direction ='reverse'
# 利用 FOC 控制调整电流,确保无波动
new_current = current_control.adjust_current_for_reverse()
return new_current这段代码简单模拟了电机正反转切换,通过调整电机旋转方向设置,并借助 FOC 控制的电流调整函数 adjustcurrentfor_reverse() 来保证切换时电流无波动。
博世汽车电驱仿真模型在同步电机和异步电机的应用上,通过实现相电流完美波形、自动计算弱磁模型、调用脚本进行 FOC 控制以及正反转切换电流无波动等一系列技术,为汽车电驱系统的高效稳定运行提供了坚实保障。无论是在学术研究还是实际工程应用中,都有很多值得我们学习和借鉴的地方。