突破灾难性遗忘!基于经验回放+EWC的核电站故障诊断增量学习系统完整实现资源-CSDN下载
一、引言:当AI遇到"遗忘症"------灾难性遗忘的挑战
在深度学习领域,有一个令人头疼的问题:灾难性遗忘(Catastrophic Forgetting)。想象一下,你训练了一个能够识别10种核电站故障的智能诊断系统,准确率高达95%。但是,当系统需要学习第11种新故障时,悲剧发生了------它突然忘记了之前学过的所有故障类型,准确率暴跌到30%以下。这就是灾难性遗忘的残酷现实。
在核电站这样的关键基础设施中,故障诊断系统必须能够:
- 持续学习:随着设备老化、运行条件变化,不断出现新的故障模式
- 保持记忆:不能忘记已经学过的历史故障类型
- 实时部署:不能每次都重新训练整个模型(计算成本和时间成本都太高)
传统的机器学习方法在面对这个问题时显得力不从心。每次新增故障类型,都需要:
- 重新收集所有历史数据
- 重新训练整个模型(可能需要数天甚至数周)
- 重新部署系统(停机时间成本巨大)
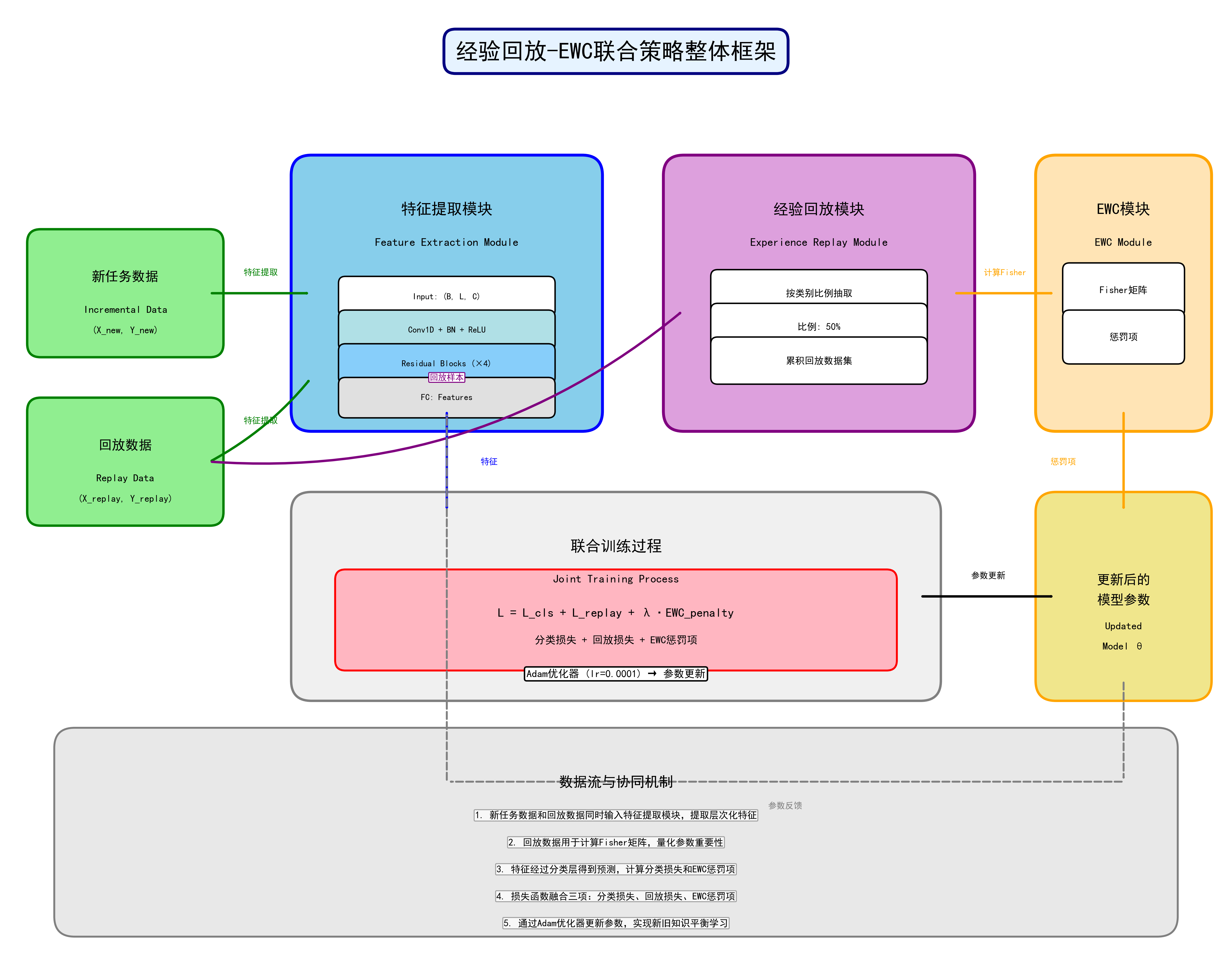
本文提出的解决方案:基于经验回放(Experience Replay)+ 弹性权重巩固(Elastic Weight Consolidation, EWC)的联合策略,让AI系统像人类一样,在学习新知识的同时不忘旧知识。
二、项目背景:核电站故障诊断的现实需求
2.1 核电站故障诊断的复杂性
核电站是一个极其复杂的系统,包含:
- 反应堆系统:核反应堆、控制棒、冷却系统
- 蒸汽系统:蒸汽发生器、主蒸汽管道、安全阀
- 给水系统:给水管道、给水泵、给水流量控制
- 安全系统:高压安注系统、压力安全系统
每个系统都可能发生多种故障,例如:
- 主蒸汽管道破裂:可能导致反应堆失压,是严重事故
- 冷却剂管道破口:会导致冷却剂流失,可能引发堆芯熔毁
- 蒸汽发生器传热管破裂(SGTR):会导致一回路和二回路之间的泄漏
- 给水流量丧失:会导致蒸汽发生器干涸
- 掉棒事故:控制棒意外掉落,导致反应性异常
- 主泵卡轴:主循环泵故障,影响冷却剂循环
- 安全阀误开启:压力安全系统故障
- 高压安注系统意外投入:安全系统误动作
2.2 数据特点
本项目使用的数据来自核电站仿真系统,每个故障类型包含:
- 多工况数据:不同功率水平、不同严重程度
- 时序数据:每个样本是时间序列,包含多个传感器读数
- 高维特征:每个时间步包含多个物理参数(压力、温度、流量等)
数据格式:
- 初始数据集:10种故障类型,每种包含多个工况的CSV文件
- 增量数据集:分阶段新增的故障类型
三、核心技术原理深度解析
3.1 灾难性遗忘的数学本质
要理解如何解决灾难性遗忘,首先需要理解它的数学本质。
假设我们有一个神经网络模型 f_\\theta(x),参数为 \\theta。在任务A上训练后,我们得到最优参数 \\theta_A\^:
\\theta_A\^\* = \\arg\\min_\\theta \\mathcal{L}A(\\theta)
其中 \\mathcal{L}A(\\theta) 是任务A上的损失函数。
当我们在任务B上继续训练时,目标是:
\\theta_B\^\* = \\arg\\min_\\theta \\mathcal{L}B(\\theta)
问题在于:如果直接优化 \\mathcal{L}B(\\theta),参数会从 \\theta_A\^ 移动到 \\theta_B\^,导致模型在任务A上的性能急剧下降。
3.2 经验回放(Experience Replay)机制
核心思想:在学习新任务时,同时回顾旧任务的样本。
实现方式:
- 在训练初始任务时,保存一部分代表性样本到回放缓冲区(Replay Buffer)
- 在训练新任务时,从回放缓冲区中采样旧样本,与新样本混合训练
数学表达:
\\mathcal{L}{total} = \\mathcal{L}{new}(\\theta) + \\alpha \\cdot \\mathcal{L}{replay}(\\theta)
其中:
- \\mathcal{L}{new}(\\theta) 是新任务的损失
- \\mathcal{L}{replay}(\\theta) 是回放样本的损失
- \\alpha 是平衡系数
优势:
- 简单直观,易于实现
- 不需要修改网络结构
- 效果显著
局限性:
- 需要存储历史样本(内存开销)
- 回放样本的选择策略影响性能
- 对于大规模数据,回放缓冲区可能不够大
3.3 弹性权重巩固(EWC)机制
核心思想:通过Fisher信息矩阵量化每个参数对旧任务的重要性,对重要参数施加约束,防止其过度偏离最优值。
Fisher信息矩阵:
F_i = \\mathbb{E}{x \\sim p(x\|y), y \\sim p(y)} \\left\[ \\left( \\frac{\\partial \\log p(y\|x, \\theta)}{\\partial \\theta_i} \\right)\^2 \\right\]
Fisher信息矩阵 F_i 衡量参数 \\theta_i 对模型输出的敏感度。F_i 越大,说明 \\theta_i 对任务越重要。
EWC损失函数:
\\mathcal{L}{EWC}(\\theta) = \\mathcal{L}{new}(\\theta) + \\frac{\\lambda}{2} \\sum_i F_i (\\theta_i - \\theta_i\^)\^2
其中:
- \\theta_i\^ 是旧任务的最优参数
- F_i 是参数 \\theta_i 的Fisher信息
- \\lambda 是正则化系数(控制约束强度)
物理意义:
- 如果 F_i 很大(参数重要),则 (\\theta_i - \\theta_i\^)\^2 的惩罚很大,参数不能偏离太远
- 如果 F_i 很小(参数不重要),则允许参数自由调整
优势:
- 不需要存储原始数据,只需要存储Fisher信息矩阵和最优参数
- 理论基础扎实
- 内存效率高
局限性:
- 假设参数空间是二次的(可能不够准确)
- Fisher信息矩阵的计算需要额外开销
- 对于多任务场景,需要累积多个Fisher矩阵
3.4 联合策略:Replay + EWC
为什么联合使用?
- 互补性:
- Replay提供显式的旧任务样本,让模型直接"看到"旧数据
- EWC提供隐式的参数约束,防止参数过度偏离
- 双重防护:
- Replay:数据层面的防护
- EWC:参数层面的防护
- 鲁棒性:
- 即使回放样本选择不当,EWC仍能提供保护
- 即使EWC的Fisher估计不准确,Replay仍能发挥作用
联合损失函数:
\\mathcal{L}{total} = \\mathcal{L}{replay}(\\theta) + \\mathcal{L}{new}(\\theta) + \\lambda{EWC} \\cdot \\mathcal{L}{EWC}(\\theta)
四、网络架构设计:ResNet1D详解
4.1 为什么选择ResNet1D?
一维时序数据的特点:
- 核电站传感器数据是时间序列
- 每个时间步包含多个特征(压力、温度、流量等)
- 需要捕捉时序依赖关系
ResNet的优势:
- 残差连接:解决深层网络的梯度消失问题
- 批归一化:加速训练,提高稳定性
- 层次化特征提取:从局部特征到全局特征
4.2 ResNet1D架构详解
输入格式:
- 形状:(batch_size, sequence_length, num_features)
- 例如:(64, 90, 50) 表示64个样本,每个样本90个时间步,每个时间步50个特征
网络结构:
输入 (B, L, C)
↓
转置 (B, C, L) # Conv1d需要通道在前
↓
Conv1d(k=7, s=2) + BN + ReLU
↓
MaxPool1d(k=3, s=2)
↓
Layer1: 2个残差块,64通道
↓
Layer2: 2个残差块,128通道,stride=2
↓
Layer3: 2个残差块,256通道,stride=2
↓
Layer4: 2个残差块,512通道,stride=2
↓
AdaptiveAvgPool1d(1) # 全局平均池化
↓
Flatten
↓
Linear(512, num_classes)
↓
输出 (B, num_classes)
残差块结构:
class ResidualBlock1D(nn.Module):
def init(self, in_channels, out_channels, stride=1):
第一个卷积:可能改变通道数和尺寸
self.conv1 = nn.Conv1d(in_channels, out_channels,
kernel_size=3, stride=stride, padding=1)
self.bn1 = nn.BatchNorm1d(out_channels)
第二个卷积:保持通道数和尺寸
self.conv2 = nn.Conv1d(out_channels, out_channels,
kernel_size=3, stride=1, padding=1)
self.bn2 = nn.BatchNorm1d(out_channels)
下采样层(如果需要)
if stride != 1 or in_channels != out_channels:
self.downsample = nn.Sequential(
nn.Conv1d(in_channels, out_channels,
kernel_size=1, stride=stride),
nn.BatchNorm1d(out_channels)
)
def forward(self, x):
identity = x
out = self.conv1(x)
out = self.bn1(out)
out = F.relu(out)
out = self.conv2(out)
out = self.bn2(out)
残差连接
if self.downsample is not None:
identity = self.downsample(x)
out += identity # 关键:残差连接
out = F.relu(out)
return out
关键设计点:
- 滑动窗口:将长时序数据切分成固定长度的窗口(如90个时间步)
- 动态输出层:在增量学习时,扩展分类层以适应新类别数
- 特征提取器共享:所有任务共享特征提取层,只扩展分类层
五、完整实现代码解析
5.1 数据加载与预处理
滑动窗口函数:
def Slidingwindow(dataX, STEPS=10):
"""
将长时序数据切分成固定长度的窗口
输入: dataX shape (T, F) - T个时间步,F个特征
输出: X shape (T-STEPS+1, STEPS, F) - 多个窗口
"""
X = \[\]
for i in range(dataX.shape0 - STEPS):
X.append(dataXi:i + STEPS, :)
return np.array(X, dtype=np.float32)
数据加载函数:
def load_data(data_path, class_mapping, steps=90, test_split=0.2):
"""
从指定路径加载数据,自动识别类别
参数:
data_path: 数据根目录
class_mapping: 类别名称到ID的映射
steps: 滑动窗口长度
test_split: 测试集比例
返回:
X_tensor: 特征张量 (N, steps, features)
Y_tensor: 标签张量 (N,)
train_indices: 训练集索引
test_indices: 测试集索引
class_names: 类别名称列表
"""
X = \[\]
Y = \[\]
class_names = \[\]
遍历每个类别文件夹
for class_name in os.listdir(data_path):
if class_name in class_mapping:
class_names.append(class_name)
class_path = os.path.join(data_path, class_name)
遍历该类别的所有CSV文件
for csv_file in os.listdir(class_path):
csv_path = os.path.join(class_path, csv_file)
try:
data = pd.read_csv(csv_path, encoding='gbk')
if data.shape0 < steps:
continue
滑动窗口切分
x = Slidingwindow(data.values, STEPS=steps)
X.append(x)
Y.append(np.array(class_mapping\[class_name] * x.shape0))
except Exception as e:
print(f"读取文件 {csv_path} 时出错: {e}")
合并所有数据
X = np.concatenate(X, axis=0)
Y = np.concatenate(Y, axis=0)
转换为PyTorch张量
X_tensor = torch.tensor(X, dtype=torch.float32)
Y_tensor = torch.tensor(Y, dtype=torch.long)
划分训练集和测试集
dataset_size = len(X_tensor)
indices = list(range(dataset_size))
split = int(np.floor(test_split * dataset_size))
np.random.shuffle(indices)
train_indices, test_indices = indicessplit:, indices:split
return X_tensor, Y_tensor, train_indices, test_indices, class_names
5.2 回放样本选择策略
按比例选择回放样本:
def select_replay_samples_by_ratio(X, Y, indices, ratio=0.5):
"""
每类按固定比例抽取样本作为回放样本
参数:
X: 特征(未使用,保持接口一致性)
Y: 标签
indices: 候选样本索引
ratio: 抽取比例(0~1)
返回:
replay_indices: 回放样本索引列表
"""
replay_indices = \[\]
unique_classes = torch.unique(Yindices)
for cls in unique_classes:
找到该类在候选集中的所有索引
class_indices = idx for idx in indices if Y\[idx == cls]
class_total = len(class_indices)
按比例计算需要抽取的数量
num_samples = max(1, int(class_total * ratio))
num_samples = min(num_samples, class_total)
不放回抽样
if num_samples < class_total:
sampled = np.random.choice(class_indices, num_samples, replace=False)
else:
sampled = class_indices
replay_indices.extend(sampled)
return replay_indices
为什么选择这个策略?
- 简单有效:不需要复杂的采样算法
- 类别平衡:每个类别都按相同比例抽取,保持类别平衡
- 可扩展:随着类别数增加,回放样本库也会增长
5.3 EWC实现详解
EWC类实现:
class EWC:
def init(self, model, dataloader, device, lambda_ewc=10000):
self.model = model
self.dataloader = dataloader
self.device = device
self.lambda_ewc = lambda_ewc
获取所有可训练参数
self.params = {n: p for n, p in self.model.named_parameters()
if p.requires_grad}
初始化Fisher信息矩阵
self.fisher = {n: torch.zeros_like(p.data, device=self.device)
for n, p in self.params.items()}
计算Fisher信息矩阵
self._compute_fisher()
保存旧参数(当前最优参数)
self.old_params = {n: p.clone().detach().to(self.device)
for n, p in self.params.items()}
def _compute_fisher(self):
"""计算Fisher信息矩阵"""
original_mode = self.model.training
self.model.eval()
criterion = nn.CrossEntropyLoss()
计算总样本数(用于归一化)
total_samples = 0
for inputs, _ in self.dataloader:
total_samples += inputs.size(0)
累加梯度平方
for inputs, targets in self.dataloader:
inputs, targets = inputs.to(self.device), targets.to(self.device)
self.model.zero_grad()
outputs = self.model(inputs)
loss = criterion(outputs, targets)
loss.backward()
累加每个参数的梯度平方
for n, p in self.params.items():
if p.grad is not None:
self.fishern += (p.grad ** 2) / total_samples
恢复模型原始模式
self.model.train(original_mode)
def penalty(self):
"""计算EWC惩罚项"""
loss = 0.0
for n, p in self.params.items():
确保所有张量在同一设备
fisher = self.fishern
old_param = self.old_paramsn
EWC惩罚:F_i * (θ_i - θ_i^*)^2
loss += (fisher * (p - old_param) ** 2).sum()
return self.lambda_ewc * loss / 2
关键点解析:
- Fisher信息矩阵计算:
- 在旧任务的最优参数上计算
- 使用回放数据(或旧任务数据)
- 对梯度平方求平均(归一化)
- 惩罚项计算:
- 对每个参数计算 (θ_i - θ_i\^)\^2
- 乘以对应的Fisher信息 F_i
- 求和后乘以正则化系数 \\lambda_{EWC}
- 参数更新:
- 在训练新任务时,总损失 = 分类损失 + EWC惩罚
- 通过反向传播更新参数
- 重要参数(F_i大)的更新幅度会被限制
5.4 增量训练流程
核心训练函数:
def train_with_replay_and_incremental(
model, replay_loader, incremental_loader,
test_loader, history_test_loader, incremental_test_loader,
ewc, epochs=100, lr=0.0001
):
"""
使用Replay+EWC进行增量训练
参数:
model: 待训练的模型
replay_loader: 回放数据加载器(包含所有历史回放样本)
incremental_loader: 增量数据加载器(当前阶段的新数据)
test_loader: 合并测试集加载器
history_test_loader: 历史类别测试集加载器
incremental_test_loader: 增量类别测试集加载器
ewc: EWC对象
epochs: 训练轮数
lr: 学习率
"""
model.train()
optimizer = optim.Adam(model.parameters(), lr=lr)
criterion = nn.CrossEntropyLoss()
train_losses = \[\]
test_accuracies = \[\]
initial_test_accuracies = \[\]
incremental_test_accuracies = \[\]
for epoch in range(epochs):
running_loss = 0.0
correct = 0
total = 0
创建迭代器
replay_iter = iter(replay_loader)
incre
incremental_iter = iter(incremental_loader)
确定最大迭代次数
max_iter = max(len(replay_loader), len(incremental_loader))
for i in range(max_iter):
处理回放数据
try:
replay_inputs, replay_targets = next(replay_iter)
replay_inputs, replay_targets = replay_inputs.to(device), replay_targets.to(device)
optimizer.zero_grad()
replay_outputs = model(replay_inputs)
replay_loss = criterion(replay_outputs, replay_targets)
添加EWC惩罚
replay_penalty = ewc.penalty()
replay_loss = replay_loss + replay_penalty
replay_loss.backward()
optimizer.step()
running_loss += replay_loss.item()
, predicted = replay_outputs.max(1)
total += replay_targets.size(0)
correct += predicted.eq(replay_targets).sum().item()
except StopIteration:
replay_iter = iter(replay_loader)
处理增量数据
try:
inc_inputs, inc_targets = next(incremental_iter)
inc_inputs, inc_targets = inc_inputs.to(device), inc_targets.to(device)
optimizer.zero_grad()
inc_outputs = model(inc_inputs)
inc_loss = criterion(inc_outputs, inc_targets)
添加EWC惩罚
inc_penalty = ewc.penalty()
inc_loss = inc_loss + inc_penalty
inc_loss.backward()
optimizer.step()
running_loss += inc_loss.item()
, predicted = inc_outputs.max(1)
total += inc_targets.size(0)
correct += predicted.eq(inc_targets).sum().item()
except StopIteration:
incremental_iter = iter(incremental_loader)
计算平均损失
epoch_loss = running_loss / (2 * max_iter)
epoch_acc = correct / total
train_losses.append(epoch_loss)
评估模型
test_accuracy, , = test_model(model, test_loader)
initial_test_accuracy, , = test_model(model, history_test_loader)
incremental_test_accuracy, , = test_model(model, incremental_test_loader)
test_accuracies.append(test_accuracy)
initial_test_accuracies.append(initial_test_accuracy)
incremental_test_accuracies.append(incremental_test_accuracy)
print(f'Epoch {epoch + 1}/{epochs}, 训练Loss: {epoch_loss:.4f}, 训练Acc: {epoch_acc:.4f}')
print(f' 合并测试集Accuracy: {test_accuracy:.4f}')
print(f' 历史类别测试集Accuracy: {initial_test_accuracy:.4f}')
print(f' 当前增量类别测试集Accuracy: {incremental_test_accuracy:.4f}')
return model, train_losses, test_accuracies, initial_test_accuracies, incremental_test_accuracies
**训练流程的关键点**:
-
**混合训练**:每个epoch中,回放数据和增量数据交替训练
-
**双重损失**:回放数据和增量数据都添加EWC惩罚
-
**多维度评估**:同时评估合并准确率、历史准确率、增量准确率
5.5 主函数:完整的增量学习流程
**主函数核心逻辑**:
ython
def main():
超参数设置
batch_size = 64
initial_epochs = 100
learning_rate = 0.001
steps = 90 # 时间序列长度
replay_ratio = 0.5 # 回放样本比例
incremental_epochs = 100
lambda_ewc = 10000 # EWC正则化系数
1. 获取初始类别映射
initial_classid = get_initial_class_mapping(INITIAL_DATA_PATH)
2. 获取增量学习阶段
incremental_stages, incremental_class_mappings = get_incremental_stages(INCREMENTAL_STAGES_PATH)
3. 分配类别ID
incremental_class_mappings, combined_class_mappings = assign_class_ids(
initial_classid, incremental_class_mappings
)
4. 加载初始数据并训练初始模型
X_initial, Y_initial, train_indices_initial, test_indices_initial, _ = load_data(
INITIAL_DATA_PATH, initial_classid, steps=steps
)
model = create_resnet_model(input_size=X_initial.shape2,
num_classes=len(initial_classid)).to(device)
训练初始模型
model, initial_train_losses, initial_test_accuracies = train_model(
model, initial_train_loader, initial_test_loader,
epochs=initial_epochs, lr=learning_rate
)
5. 选择初始回放样本
replay_indices_initial = select_replay_samples_by_ratio(
X_initial, Y_initial, train_indices_initial, ra