ABB机器人仿真工作站,教学实训平台,提供软件的时候全部模型,压缩成工作站文件,解压即可使用。 提供的是工作站的全部模型。
最近发现了一个超赞的ABB机器人仿真工作站教学实训平台,必须来和大家分享一下。
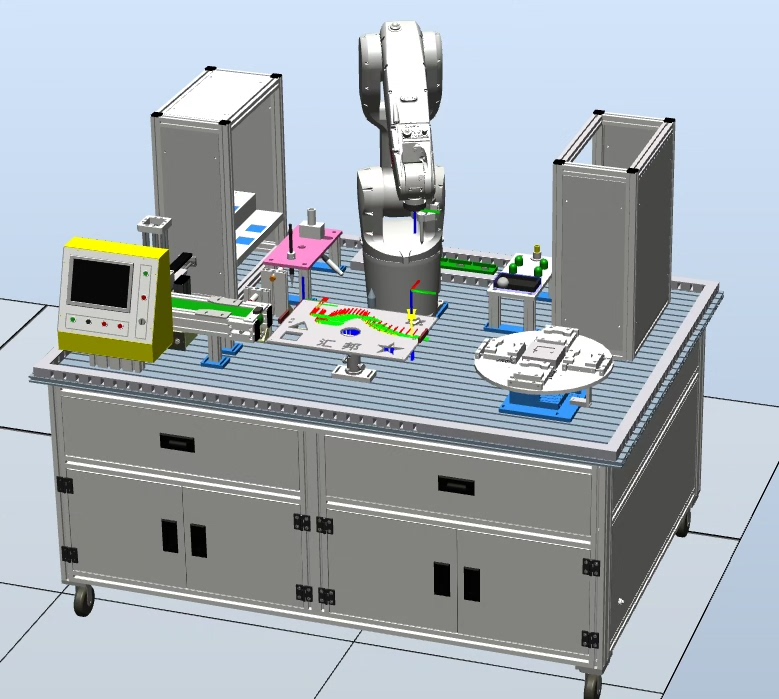
对于学习机器人相关知识或者进行教学实训来说,搭建一个机器人仿真环境常常让人头疼,要考虑各种模型、参数设置等。但这个平台就很贴心,直接把软件连同全部模型都压缩成了工作站文件。
想象一下,你拿到这个压缩包,只需解压,就能立即拥有一个完整可用的工作站,就像下面这样简单粗暴(虽然这里不是真实解压代码,但可以类比解压的便捷性):
python
# 假设这是模拟解压工作站文件的代码
import shutil
# 定义压缩包路径和目标解压路径
zip_file_path = 'ABB_robot_workstation.zip'
extract_dir = 'ABB_workstation'
try:
shutil.unpack_archive(zip_file_path, extract_dir)
print("工作站文件解压成功,可直接使用!")
except Exception as e:
print(f"解压出现错误: {e}")这段代码中,我们用Python的shutil库来模拟解压操作。unpack_archive函数就像是这个平台解压工作站文件的一个缩影,一行代码就完成了解压过程。实际平台解压也是如此便捷,不用你再到处找模型文件、手动配置各种复杂参数。
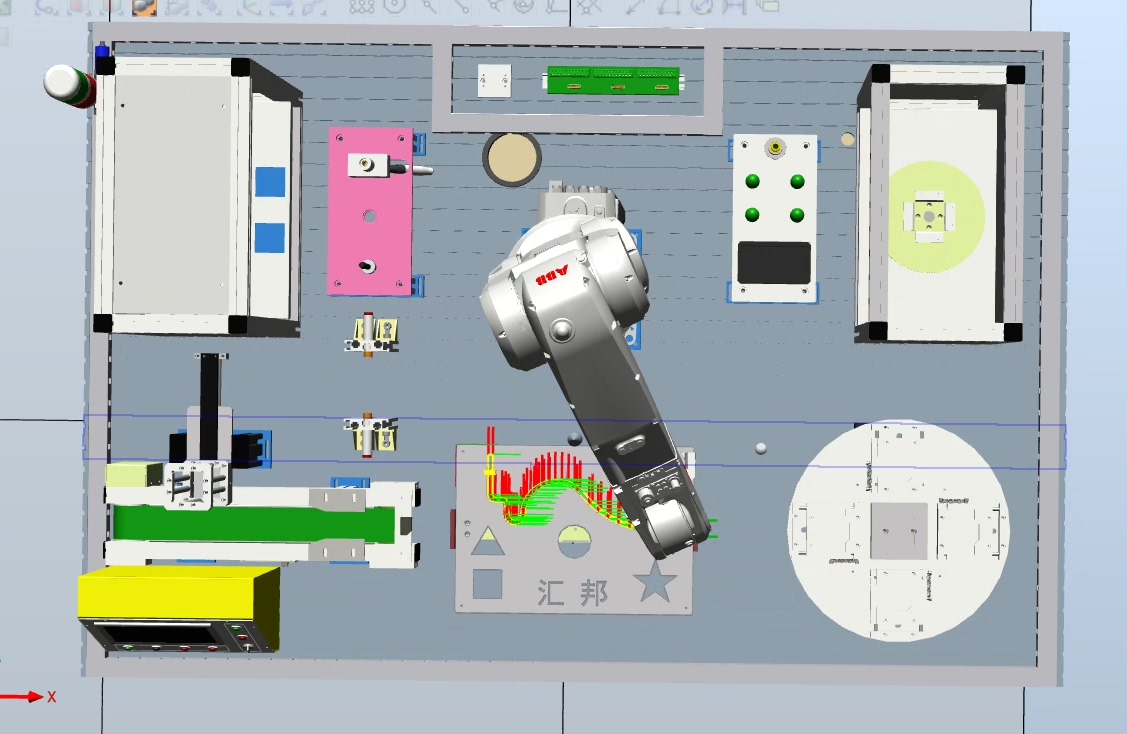
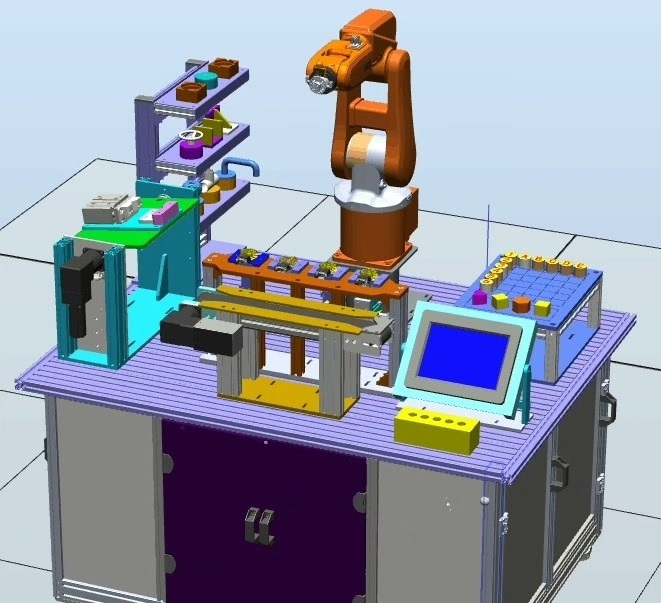
这种直接提供工作站全部模型的方式,大大降低了使用门槛。无论是学生学习ABB机器人编程,还是老师进行教学演示,都能快速上手,把更多精力放在机器人编程逻辑、动作规划等核心内容上。
比如说,在这个解压后的工作站里,你可以直接调用ABB机器人的模型,进行路径规划的练习。假设使用RobotStudio软件(ABB官方的机器人仿真软件),可能会有类似这样的代码(这里代码仅为示意,实际代码会因具体需求和软件版本有所不同):
python
# 假设这是在RobotStudio中控制ABB机器人运动的Python脚本示例
from robostudio_api import Robot
# 连接到解压后的工作站中的机器人模型
my_robot = Robot('ABB_Robot1')
# 定义目标位置
target_position = [100, 200, 300] # 示例位置坐标
# 控制机器人移动到目标位置
my_robot.move_to(target_position)在这段代码里,我们先通过Robot类连接到解压后的工作站中的机器人模型,就像在真实平台里直接调用模型一样。然后定义目标位置,最后让机器人移动到该位置。
总之,这个ABB机器人仿真工作站教学实训平台,以提供工作站全部模型并压缩成解压即可用的工作站文件的方式,为教学和学习带来了极大的便利,绝对是机器人爱好者和教育工作者的福音。