#!/usr/bin/env python3
# -*- coding: utf-8 -*-
import os
import time
import socket
import struct
import select
import threading
import subprocess
import argparse
# ===== CAN 常量 =====
SOL_CAN_RAW = getattr(socket, "SOL_CAN_RAW", 101)
CAN_RAW_FILTER = getattr(socket, "CAN_RAW_FILTER", 1)
CAN_RAW_LOOPBACK = getattr(socket, "CAN_RAW_LOOPBACK", 3)
CAN_RAW_RECV_OWN_MSGS = getattr(socket, "CAN_RAW_RECV_OWN_MSGS", 4)
CAN_ECHO_FLAG = 0x20000000
STD_MASK = 0x7FF
CAN_ID = 0x123
PAYLOAD = bytes([0x11, 0x22, 0x33, 0x44, 0x55, 0x66, 0x77, 0x88])
CAN_FRAME_FMT = "=IB3x8s" # can_id, dlc, pad, data
# ===== 工具函数 =====
def run(cmd):
subprocess.run(cmd, shell=True, stdout=subprocess.DEVNULL, stderr=subprocess.DEVNULL)
def setup_can():
run("sudo ifconfig can0 down")
run("sudo ifconfig can1 down")
run("sudo ip link set can0 up type can bitrate 1000000")
run("sudo ip link set can1 up type can bitrate 1000000 dbitrate 1000000 restart-ms 1000 berr-reporting on fd on")
run("sudo ifconfig can0 txqueuelen 65536")
run("sudo ifconfig can1 txqueuelen 65536")
def open_can(iface, is_tx):
s = socket.socket(socket.AF_CAN, socket.SOCK_RAW, socket.CAN_RAW)
s.bind((iface,))
flt = struct.pack("=II", CAN_ID, STD_MASK)
s.setsockopt(SOL_CAN_RAW, CAN_RAW_FILTER, flt)
if is_tx:
s.setsockopt(SOL_CAN_RAW, CAN_RAW_LOOPBACK, 0)
else:
s.setsockopt(SOL_CAN_RAW, CAN_RAW_RECV_OWN_MSGS, 0)
return s
def pack_frame():
return struct.pack(CAN_FRAME_FMT, CAN_ID, 8, PAYLOAD)
def fmt_frame():
return "ID=0x123 DATA=11 22 33 44 55 66 77 88"
# ===== 发送线程 =====
def send_loop(sock, rate, end_t, stat, key, tag):
interval = 1.0 / rate
next_t = time.perf_counter()
frame = pack_frame()
printed = False
while time.perf_counter() < end_t:
now = time.perf_counter()
if now < next_t:
time.sleep(min(0.0005, next_t - now))
continue
try:
sock.send(frame)
stat[key] += 1
if not printed:
print(f"[{tag} TX OK] {fmt_frame()}")
printed = True
except OSError:
pass
next_t += interval
# ===== 接收线程 =====
def recv_loop(sock, end_t, stat, key, tag):
printed = False
while time.perf_counter() < end_t:
r, _, _ = select.select([sock], [], [], 0.05)
if not r:
continue
frame = sock.recv(16)
can_id, dlc, data = struct.unpack(CAN_FRAME_FMT, frame)
if can_id & CAN_ECHO_FLAG:
continue
if (can_id & STD_MASK) == CAN_ID and data[:8] == PAYLOAD:
stat[key] += 1
if not printed:
print(f"[{tag} RX OK] {fmt_frame()}")
printed = True
# ===== 主程序 =====
def main():
parser = argparse.ArgumentParser()
parser.add_argument("--no-setup", action="store_true", help="跳过 can 配置")
parser.add_argument("--duration", type=float, default=3.0, help="每档测试秒数")
parser.add_argument("--rates", default="10,50,100,200,500,1000,2000,3000,4000,5000")
args = parser.parse_args()
if not args.no_setup:
setup_can()
tx0 = open_can("can0", True)
tx1 = open_can("can1", True)
rx0 = open_can("can0", False)
rx1 = open_can("can1", False)
rates = [int(x) for x in args.rates.split(",")]
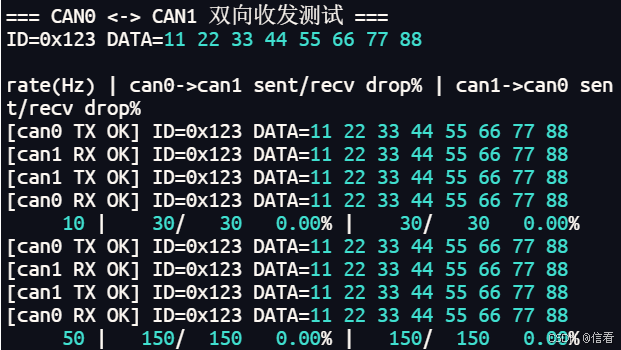
print("\n=== CAN0 <-> CAN1 双向收发测试 ===")
print("ID=0x123 DATA=11 22 33 44 55 66 77 88\n")
print("rate(Hz) | can0->can1 sent/recv drop% | can1->can0 sent/recv drop%")
for rate in rates:
stat = {
"s0": 0, "r1": 0,
"s1": 0, "r0": 0
}
start = time.perf_counter()
send_end = start + args.duration
recv_end = send_end + 0.5
ts0 = threading.Thread(target=send_loop, args=(tx0, rate, send_end, stat, "s0", "can0"))
ts1 = threading.Thread(target=send_loop, args=(tx1, rate, send_end, stat, "s1", "can1"))
tr0 = threading.Thread(target=recv_loop, args=(rx0, recv_end, stat, "r0", "can0"))
tr1 = threading.Thread(target=recv_loop, args=(rx1, recv_end, stat, "r1", "can1"))
tr0.start(); tr1.start()
ts0.start(); ts1.start()
ts0.join(); ts1.join()
tr0.join(); tr1.join()
d01 = 0 if stat["s0"] == 0 else (stat["s0"] - stat["r1"]) / stat["s0"] * 100
d10 = 0 if stat["s1"] == 0 else (stat["s1"] - stat["r0"]) / stat["s1"] * 100
print(f"{rate:7d} | {stat['s0']:5d}/{stat['r1']:5d} {d01:6.2f}%"
f" | {stat['s1']:5d}/{stat['r0']:5d} {d10:6.2f}%")
if d01 > 1 or d10 > 1:
print(">> 已明显开始丢包,再提速意义不大了")
break
print("\n=== 测试结束 ===")
if __name__ == "__main__":
if os.geteuid() != 0:
print("请 sudo 运行")
exit(1)
main()