在计算机视觉领域,边缘检测是一个基础且核心的任务------它就像给图像"描边",提取出物体的轮廓信息,为后续的目标识别、图像分割、特征匹配等高级任务打下基础。
什么是Canny边缘检测?
Canny边缘检测是由计算机科学家John F. Canny在1986年提出的一种多阶段边缘检测算法。它的核心优势在于:检测准确率高、定位精准、抗噪声能力强,并且能有效抑制虚假边缘。
简单来说,普通边缘检测可能会把图像中的"噪声"误判为边缘,或者检测出的边缘不连续、位置偏移;而Canny通过一套严谨的流程,能更"聪明"地找到真正的图像边缘。
Canny的4个关键步骤
1、灰度化
边缘的本质是"亮度的突变",和颜色无关。

2. 高斯降噪
图像噪声就像照片上的"雪花点",是像素值的随机突变。这些突变很容易被边缘检测算法误判为"边缘",导致检测结果杂乱无章。
Canny采用"高斯模糊"来降噪,核心逻辑是:用一个"高斯核"(类似一个滑动窗口)遍历图像,对窗口内的像素进行"加权平均"------中心像素权重高,边缘像素权重低。这样一来,突变的噪声像素会被周围正常像素"中和",图像变得平滑,噪声被大幅抑制。
这里要注意:高斯核的尺寸(常用(5,5))和标准差会影响降噪效果------核越大、标准差越大,降噪越强,但图像细节也会损失越多,需要平衡选择。
3、梯度计算
定位边缘的位置和方向
-
梯度大小:表示亮度变化的"剧烈程度",梯度越大,越可能是边缘;
-
梯度方向:表示亮度变化的"方向"。
4、非极大值抑制
计算出梯度后,我们得到了许多"候选边缘点",但它们通常太"粗"了。非极大值抑制的目标是只保留局部梯度最大的点,从而得到细化的边缘。
5、双阈值筛选
使用两个阈值(高阈值和低阈值)来区分强边缘、弱边缘和非边缘。
Canny设定了两个阈值:高阈值(maxVal)和低阈值(minVal),根据梯度大小对像素进行分类:
-
梯度值 > 高阈值:强边缘,直接保留;
-
梯度值 < 低阈值:弱边缘,直接剔除;
-
低阈值 ≤ 梯度值 ≤ 高阈值:潜在边缘,只有当它和"强边缘"直接相连时,才被保留(否则剔除)。
这个规则能有效剔除孤立的虚假边缘(残留噪声),同时保留连续的真实边缘。
Canny边缘检测代码
python
import cv2
def canny_edge_detection(img):
"""Canny边缘检测:灰度化→降噪→边缘提取"""
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY) # 灰度化
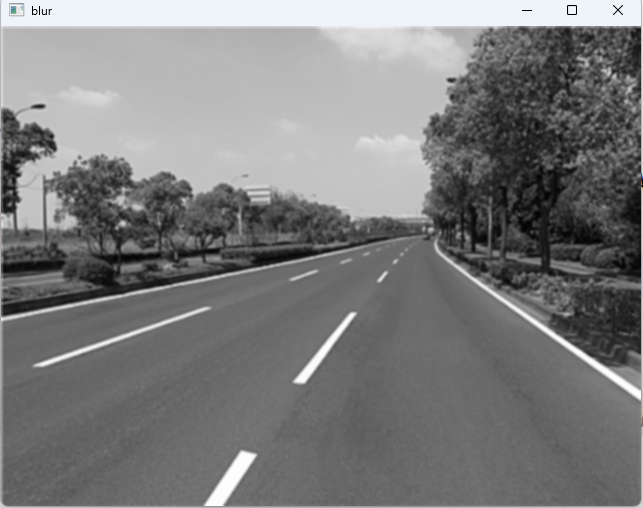
blur = cv2.GaussianBlur(gray, (5, 5), 0) # 高斯降噪
# Canny边缘检测(低阈值50,高阈值150)(内置了梯度计算、NMS、双阈值筛选)
canny = cv2.Canny(blur, 50, 150)
return canny
if __name__ == "__main__":
img = cv2.imread("1.png")
img = cv2.resize(img, (640, 480)) # 缩放图片
canny = canny_edge_detection(img)
cv2.imshow("canny", canny)
cv2.waitKey(0)
cv2.destroyAllWindows()原图:

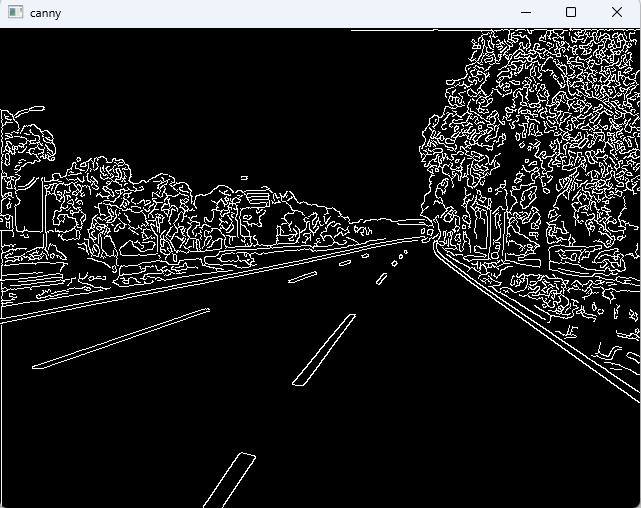
处理后: