
基于CAN FD技术的虹科灵巧手高效控制系统
在人形机器人的研发版图中,灵巧手是连接技术构想与实际应用的关键桥梁,要让这双「机械手」实现毫米级运动、毫牛级力控,一套高效且精准的测试验证方案,是其从实验室原型走向量产落地的核心保障。
虹科打造的这套基于CAN FD技术的测试方案,将高速通信、智能监控与精准控制深度融合,为灵巧手的研发、质检与应用提供了全维度的能力支撑。本方案中承担核心执行任务的灵巧手,来自虹科合作伙伴灵巧智能,其优异的硬件表现,为虹科测试方案的价值验证提供了关键载体
当灵巧手遇上CAN FD:行业痛点与技术机遇
机器人灵巧手作为仿人机器人的核心执行部件,需具备多自由度运动、力感知与精准操作能力,其应用场景覆盖工业分拣、医疗康复、科研实验等多个领域。
而要实现对灵巧手**「毫米级运动、毫牛级力控」的精准测试**,传统通信与测试手段存在带宽不足、实时性差、数据解析复杂等痛点。

在机器人行业的通信控制中,基本会选用EtherCAT或者CAN FD作为核心通信协议。其中CAN FD凭借其稳定的传输质量和极低的布线成本崭露头角。
CAN FD作为传统CAN总线的升级版本,将数据段传输速率提升至8Mbps,单帧数据载荷扩展至64字节,同时保留了CAN总线的高可靠性与实时性优势,完美适配机器人灵巧手对「高速指令传输 + 多传感器数据回传」的需求。
虹科方案核心:三位一体的技术协同
虹科灵巧手运动控制方案以**「通信 + 监控 + 控制」**为核心逻辑 ,搭建起从信号采集到运动执行的完整验证链路,让灵巧手的每一个动作、每一组数据都可监测、可调控。

灵巧手单元
由虹科合作伙伴灵巧智能提供的这款灵巧手具备高自由度(如19DOF)、高精度力/位传感器与仿生结构设计,可复现拟人化动作与精细操作,是测试方案的核心执行单元。
CAN FD测试工具
虹科支持8路CAN(FD) 和2路1000BASE-T1协议****的总线工作站,适配灵巧手仲裁段1Mbps,数据段5Mbps的传输速率、64字节单帧载荷,且具备1微秒级时间戳精度,为「指令高速下发+数据实时回传」提供硬件基石。

虹科车辆网络通讯测试主板是一款高性能工控机主板,用于监控、仿真、模拟 CAN(FD)和T1网络报文,具备强大的数据处理和通讯能力。它集成了8路CAN(FD)接口以及2路1000BASE-T1接口,可兼容PCAN底层驱动,能够满足复杂通信网络环境下的测试、数据传输需求,广泛应用于汽车研发、智能交通、车辆检测等领域。
定制化软件平台 ------ 虹科PCAN-Explorer 6
基于虹科PCAN-Explorer 6打造的软件平台,针对灵巧智能灵巧手的通信协议做了专属适配,让复杂的测试流程变得简单高效:
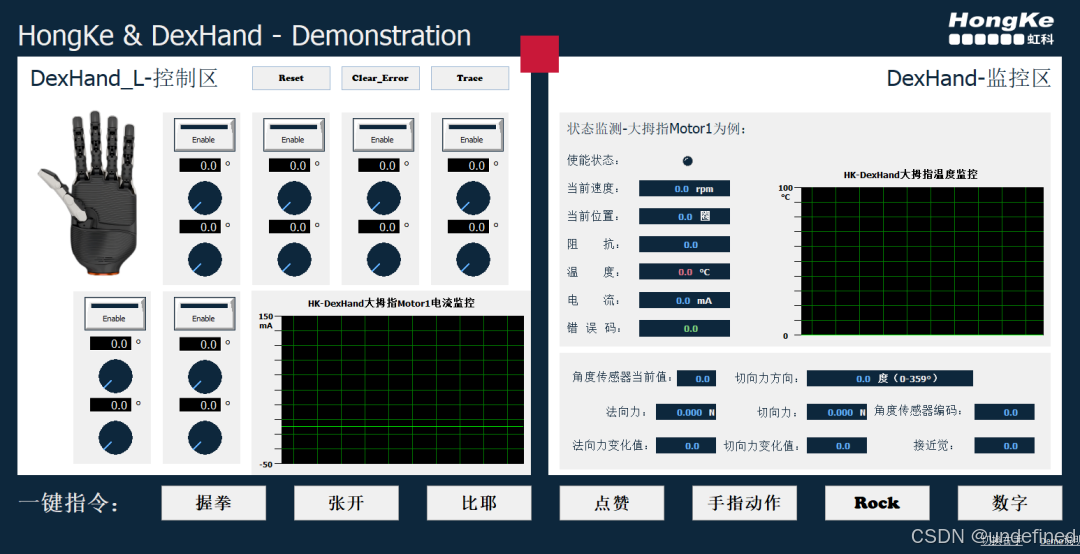
信号监控
实时采集并解析灵巧手的电机电流、温度、角度传感器、力传感器等多维度信号,以图表形式直观呈现(如本文「左右手软件监控图」所示,可分别对左手、右手的电机状态、传感器数据进行独立监控)。
指令发送
支持关键手势动作的一键式运动指令发送,也可通过参数化界面实现单关节、多关节的精细运动控制,实测延迟偏差小于5微秒,满足毫牛级力控的同步性要求。
数据解析与分析
借助数据库文件解析功能,将CAN FD总线上的原始数据转化为易懂的物理量,并支持数据记录、离线分析与故障追溯。
系统部署:从通信测试到拟人化控制
整套系统的部署流程简洁高效,无需复杂的专业操作即可完成测试准备:
快速建立通信链路

如图可见,整套系统由灵巧智能灵巧手、虹科总线工作站、上位机(运行虹科PCAN-Explorer 6定制工程)组成。
硬件连接完成后,通过虹科PCAN-Explorer 6的**「总线配置」模块设置CAN FD通信参数**(如波特率、通信数据等),即可建立灵巧手与测试工具的高速通信链路。
建立数据库,多维度信号监控 ------ 让灵巧手「状态透明化」
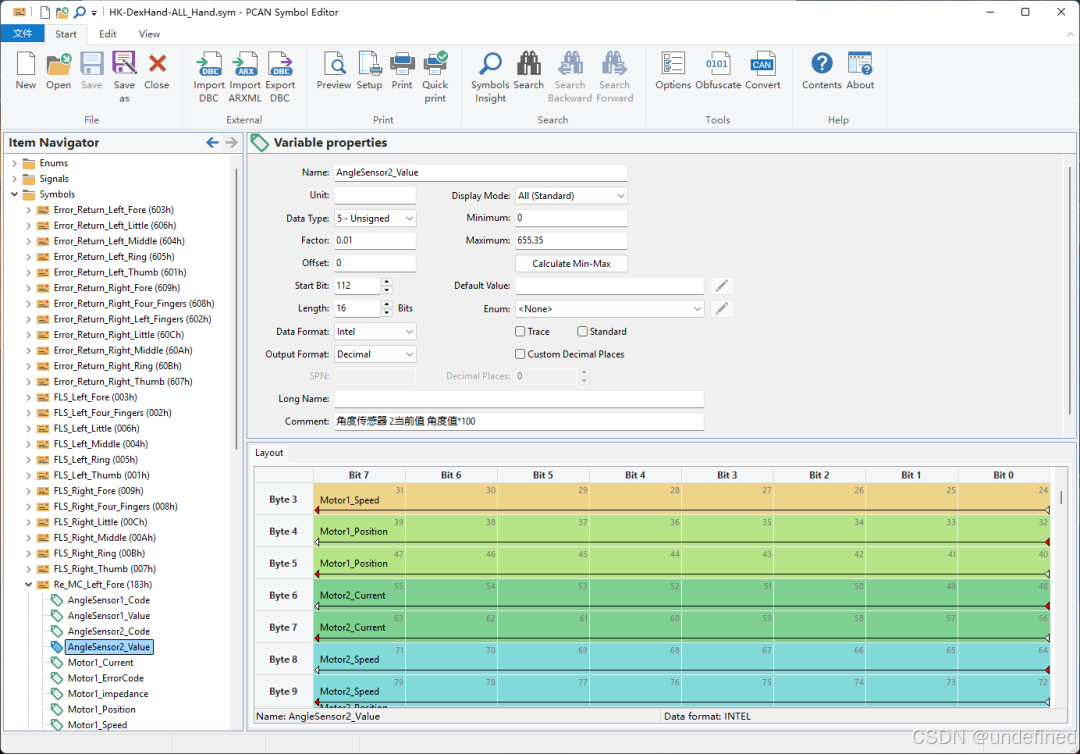
在虹科PCAN-Explorer 6软件的Symbol Editor中,可以自由建立基于CAN(FD)总线的通信数据库,包括对总线上具体报文和信号的描述、Layout,以及虚拟变量或者一些定制工程中可能用到的各种数据类型的参数。
通过对数据库文件的加载,在定制工程中我们可以从「链路层」转移到「应用层」,即便是非技术人员,也可以通过这一套定制工程,完成基本的通信测试和指令驱动:
电机状态监控
实时查看各关节电机的转速、位置、电流、温度等参数,确保电机运行在安全阈值内。
传感器数据监控
解析角度传感器、力传感器(法向力、切向力)的输出,验证灵巧手在运动过程中的位姿精度与力控性能。
通信状态监控
实时追踪CAN FD总线的负载率、错误帧等信息,保障通信链路的稳定性。
从实验室到应用场:加速灵巧手产业化落地
这套基于CAN FD技术的虹科机器人灵巧手测试方案,凭借软硬件的深度协同,构建了全链路、高精度的测试体系。
方案以**「硬件精准传输+软件智能解析」** 的专业技术架构,及全链路数据可追溯、测试流程可复现的严谨逻辑,既为灵巧手技术迭代提供量化支撑,更成为机器人产业标准化、精准化发展的技术标杆。目前,该灵巧手已在工业分拣、电力巡检等领域实现量产应用,本方案将持续为其产业化推进与规模化落地提供可靠的技术保障与测试支撑。欢迎联系虹科,预约定制企业专属解决方案。