《博主简介》
小伙伴们好,我是阿旭。
专注于计算机视觉领域,包括目标检测、图像分类、图像分割和目标跟踪等项目开发,提供模型对比实验、答疑辅导等。
《------往期经典推荐------》
二、机器学习实战专栏【链接】 ,已更新31期,欢迎关注,持续更新中~~
三、深度学习【Pytorch】专栏【链接】
四、【Stable Diffusion绘画系列】专栏【链接】
五、YOLOv8改进专栏【链接】,持续更新中~~
六、YOLO性能对比专栏【链接】,持续更新中~
《------正文------》
目录
- 引言
- 目标检测架构盘点
- [1. 单阶段检测器](#1. 单阶段检测器)
- [2. 两阶段检测器:精度优先的细节控](#2. 两阶段检测器:精度优先的细节控)
-
- [Faster R-CNN:两阶段的标杆](#Faster R-CNN:两阶段的标杆)
- [3. 基于Transformer的检测器:DETR带来的新思路](#3. 基于Transformer的检测器:DETR带来的新思路)
- 总结
引言
YOLO模型作为目标检测领域的"明星",凭借出色的精度和实时性(高FPS)广为人知,但目标检测的世界远不止YOLO。不同的模型架构各有优劣,适用于不同的场景。今天我们就来深入解析三大主流目标检测架构------单阶段检测器、两阶段检测器和基于Transformer的检测器,带你了解它们的原理、特点以及如何用Python训练和运行模型。
目标检测架构盘点
目标检测的核心是从图像中定位并识别出目标(如行人、车辆、动物等),主流架构可分为三类:
- 单阶段检测器:YOLO、SSD
- 两阶段检测器:Fast R-CNN、Faster R-CNN
- 基于Transformer的检测器:DETR
(单阶段、两阶段与基于Transformer的检测器对比)
1. 单阶段检测器
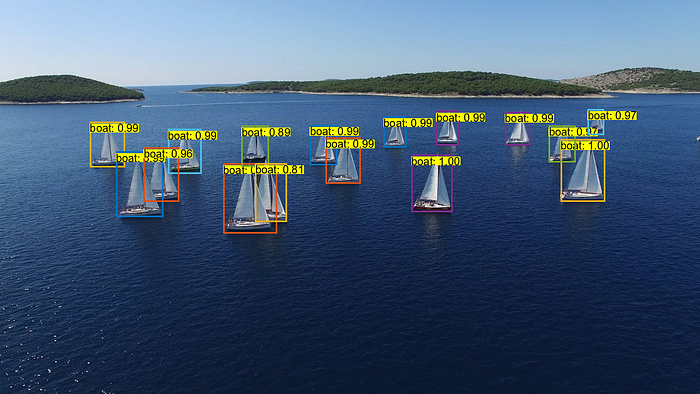
单阶段检测器的核心优势是速度快,非常适合实时场景(如视频监控、自动驾驶)。其核心原理是:通过一次神经网络计算,直接输出目标的边界框和类别标签,无需多步处理。
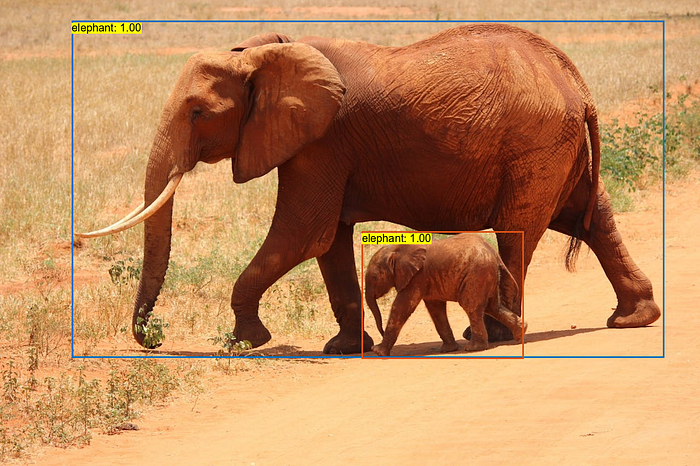
YOLO:最受欢迎的单阶段模型
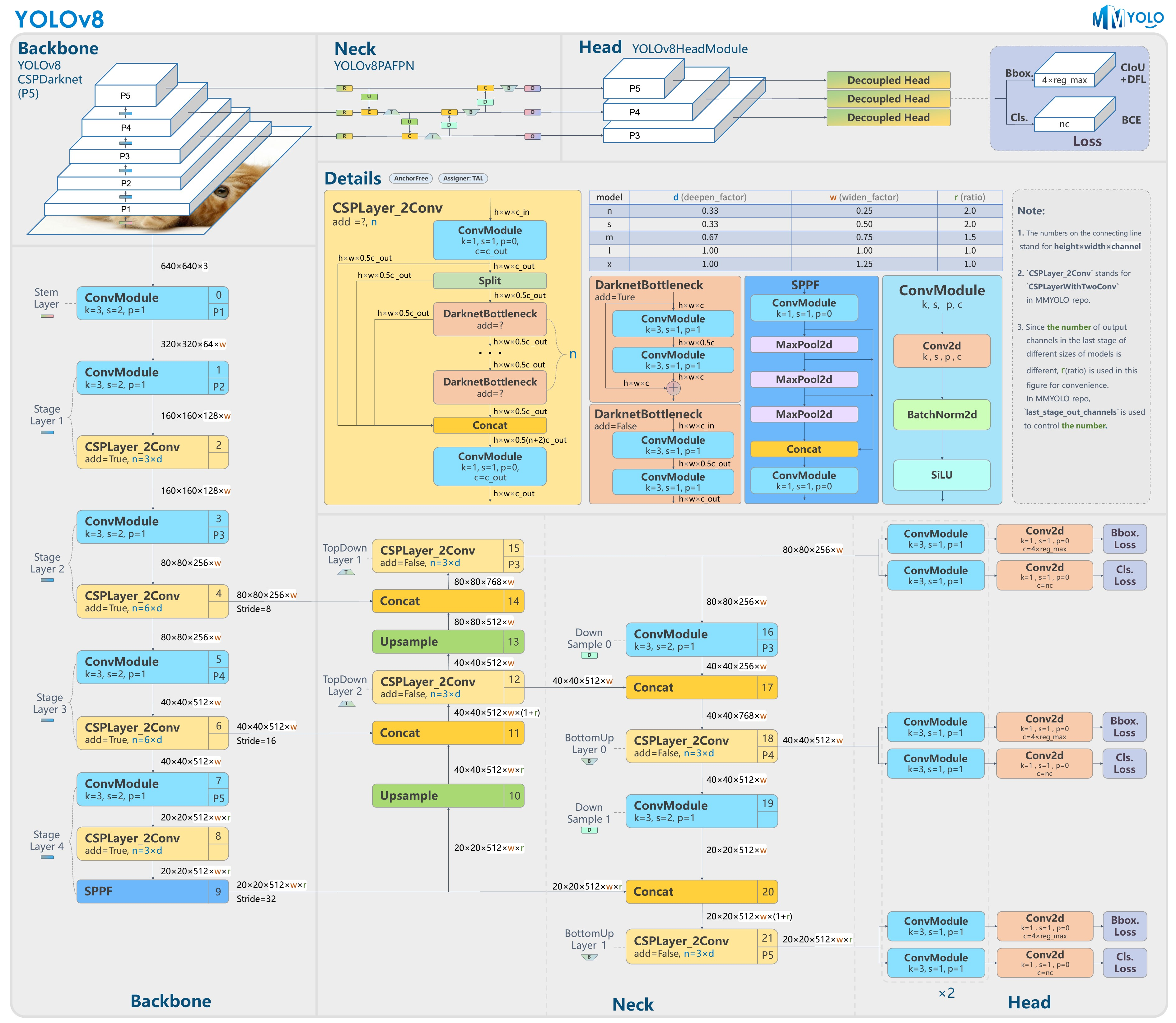
YOLO(You Only Look Once)之所以快,源于其"一步到位"的架构:骨干CNN网络提取图像特征并生成特征图,检测头直接基于特征图完成所有预测(边界框位置+类别)。
除了速度,YOLO的普及还得益于Ultralytics库------这个工具极大简化了YOLO的训练流程。即使是零基础用户,也能通过以下步骤快速上手:
- 从Kaggle、Roboflow等平台获取自定义数据集;
- 安装Ultralytics库;
- 用不到50行代码完成模型训练。
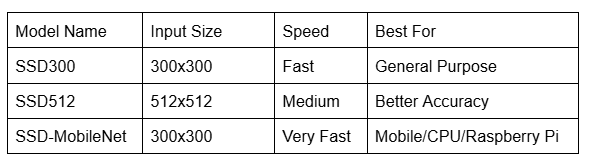
SSD:多尺度检测的"前辈"
SSD(Single Shot MultiBox Detector)也是单阶段检测器的代表,其特点是基于多尺度特征图进行检测------既利用高分辨率特征图捕捉小目标,也用低分辨率特征图识别大目标。
不过,相比YOLO的持续迭代(如YOLOv5、v8),SSD已逐渐过时。但作为经典架构,仍有学习价值,目前可通过PyTorch实现其训练。
2. 两阶段检测器:精度优先的细节控
两阶段检测器的流程分为两步,因此速度较慢(不适合实时场景),但检测精度更高,尤其擅长小目标识别。
Faster R-CNN:两阶段的标杆
Faster R-CNN的核心流程是:
- 第一阶段(区域提议):通过骨干网络和RPN(Region Proposal Network)生成可能包含目标的候选区域;
- 第二阶段(目标检测):从候选区域中精确识别目标类别并优化边界框。
其优势在于引入了FPN(特征金字塔网络)------通过融合不同尺度的特征图,让模型既能从高分辨率特征图中捕捉小目标细节,又能从低分辨率特征图中把握大目标全局,因此对小目标(如远处的行人、小物体)的检测效果远超单阶段模型。

3. 基于Transformer的检测器:DETR带来的新思路
前两种架构均基于CNN,而基于Transformer的检测器则引入了NLP领域的Transformer结构,开创了目标检测的新范式。
DETR:用Transformer做检测
DETR(Detection Transformer)的核心架构包括:
- CNN骨干网络:负责提取图像特征;
- Transformer编码器:通过自注意力机制学习图像全局特征(如不同区域的关联关系);
- Transformer解码器:将编码器输出的特征转换为最终预测(目标类别和边界框)。
这种架构摆脱了传统目标检测中对"锚框(Anchor Box)"的依赖,直接通过Set Prediction(集合预测)输出目标,简化了模型设计。
总结
三种架构各有侧重,选择时需结合场景需求:
- 实时性优先(如视频流处理):选单阶段检测器(YOLO);
- 精度优先(如小目标检测):选两阶段检测器(Faster R-CNN);
- 想尝试新范式或处理复杂场景关联:选基于Transformer的检测器(DETR)。
无论你选择哪种方法,掌握其原理并结合实践,才能真正发挥目标检测的价值。

好了,这篇文章就介绍到这里,喜欢的小伙伴感谢给点个赞和关注,更多精彩内容持续更新~~
关于本篇文章大家有任何建议或意见,欢迎在评论区留言交流!