最近在 IsaacLab 调试机器人RL训练时,我开始审视一个看似不起眼的基础配置:步进频率。
通常仿真器标配的是:物理仿真频率200Hz,配合 decimation=4,从而得到 50Hz 的控制频率。这引发了我的思考:在算力有限或对精度有更高要求的场景下,这个配置是唯一的选择吗?现实部署时的频率架构又该如何与仿真对齐?
带着这些疑问,我进行了一系列的对比测试,以下是关于 物理仿真频率 ( f s i m f_{sim} fsim) 、控制频率 ( f p o l i c y f_{policy} fpolicy) 以及 实机部署架构 的关键发现。
探索一:物理仿真频率的效费比分析
在保持模型决策频率锁定为 50Hz 的前提下,我测试了三种不同的物理仿真频率配置(通过调整 dt 和 decimation):
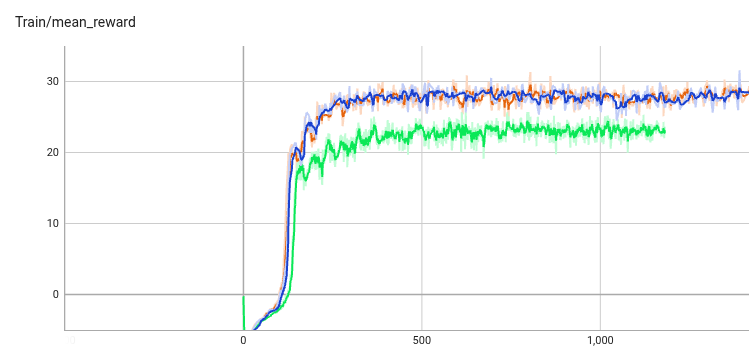
- 低频组 :100Hz ( d t = 0.01 s dt=0.01s dt=0.01s), Decimation=2,下图绿色曲线
- 基准组 :200Hz ( d t = 0.005 s dt=0.005s dt=0.005s), Decimation=4,下图蓝色曲线
- 高频组 :300Hz ( d t = 0.0033 s dt=0.0033s dt=0.0033s), Decimation=6,下图橙色曲线
1. 训练效果与收敛性对比
在一个基础的步态行走任务中,实验数据表明:
- 100Hz vs 200Hz:100Hz 组的表现有肉眼可见的下降,训练收敛较慢,且最终奖励值低于基准组。这说明 100Hz 的物理积分精度不足以支撑双足机器人基础的动力学特性。
- 200Hz vs 300Hz:两者的训练曲线非常接近,在简单行走任务上,收敛速度和最终奖励几乎没有区别。说明对于常规任务,200Hz 已经提供了足够的物理保真度。
2. 训练时间成本(迭代效率)
提升精度是有代价的。在相同的硬件环境下,记录单次迭代(Iteration)的耗时如下:
- 100Hz 配置:约 1.0s
- 200Hz 配置:约 1.5s
- 300Hz 配置 :约 2.0s
从 200Hz 提升到 300Hz,意味着物理计算量增加,导致训练时间增加了约 33%。
3. 高频的潜在价值:支持更高的增益
虽然在简单行走中 300Hz 优势不明显,但其核心价值在于控制刚度的上限 。物理步长越小,PD 控制器的稳定性越高。这意味着在 300Hz 仿真下,我们可以设置比 200Hz 更高的 K p K_p Kp(刚度系数)和 K d K_d Kd(阻尼系数)而不导致物理发散。这对于未来训练高动态、大扭矩动作(如跳跃、跑酷)至关重要。
探索二:控制频率的选择------ 50Hz 的合理性
在控制频率的选择上,50Hz 是一个经过验证的平衡点。它既能覆盖人类运动的主要频谱,又能与主流动捕数据(通常为 30fps 或 60fps)保持较好的兼容性。过低的频率(如 20Hz)会导致机器人对姿态干扰的响应滞后;而过高的频率(如 100Hz)虽然理论上限高,但对硬件带宽和延迟控制提出了极高的要求。
探索三:理想的实机部署架构------快慢分层
当我们拿着训练好的 50Hz 模型走向真机时,如何设计底层的控制架构?
直接将底层控制频率设得过低(例如仅 200Hz)并不理想,因为这意味着底层执行单元的响应延迟达到了 5ms,这对于高性能电机是一种浪费。
建议架构:
- 决策层 (RL Policy, 50Hz):负责高层运动规划,保持与仿真训练完全一致的频率。
- 执行层 (Low-level Controller, 1000Hz) :建议将底层的 PD 计算、总线通信以及电机驱动频率设定在 1000Hz (或尽可能高的频率)。
- 虽然决策层每 20ms 才更新一次目标指令,但底层的高频循环可以确保电机力矩的输出更加细腻,并能更快地响应传感器的反馈。
- 这种"慢决策、快执行"的分层架构,能最大程度发挥硬件性能,同时规避了 Sim-to-Real 中的延迟瓶颈。
探索四:频率同步的铁律------切勿"超频"
在部署阶段,一个绝对不能触碰的红线是:更改推理频率。
如果模型是在 50Hz的推理频率下训练的,在实机上必须严格以 50Hz 进行推理。切勿为了追求"反应速度"强行将推理频率提升至 100Hz。
这样做会导致域偏差:
- 神经网络对速度的感知是基于时间步长( d t dt dt)的。如果 d t dt dt 减半,模型会错误地判断当前的运动状态。
- 模型内部隐式的积分逻辑会失效,导致输出的动作幅度与预期严重不符,极易引发飞车或剧烈震荡。
总结
- 仿真端:200Hz 是性价比极高的基准选择。如果算力充裕且任务涉及高动态刚性控制,可以升级至 300Hz+,但需接受训练时间延长的代价。
- 部署端:决策频率必须严格锁定(如 50Hz),但底层执行频率应尽可能高(如 1000Hz),构建快慢分层的控制体系。