
SeedVR2 :基于对抗训练的单步扩散视频复原(SeedVR加速版)(2025)
- 专题介绍
- 一、研究背景
- 二、方法细节
-
- [2.1 预备知识](#2.1 预备知识)
- [2.2 自适应窗口注意力](#2.2 自适应窗口注意力)
- [2.3 训练相关](#2.3 训练相关)
- 三、实验论证
-
- [3.1 定量结果](#3.1 定量结果)
- [3.2 定性结果](#3.2 定性结果)
- [3.3 消融实验](#3.3 消融实验)
- 四、总结和思考
本文将对《SeedVR2: One-Step Video Restoration via Diffusion Adversarial Post-Training》这篇文章进行解读,该文提出了SeedVR2,在SeedVR的基础上实现了加速,将多步扩散变成了单步扩散。SeedVR2的核心设计在于采用了自适应窗口注意力机制 和零依赖教师模型的对抗后训练(APT) 。参考资料如下:
参考资料如下:
1. 论文地址
2. 代码地址
专题介绍
现在是数字化时代,图像与视频早已成为信息传递的关键载体。超分辨率(super resolution,SR)技术能够突破数据源的信息瓶颈,挖掘并增强低分辨率图像与视频的潜能,重塑更高品质的视觉内容,是底层视觉的核心研究方向之一。并且SR技术已有几十年的发展历程,方案也从最早的邻域插值迭代至现今的深度学习SR,但无论是经典算法还是AI算法,都在视觉应用领域内发挥着重要作用。
本专题旨在跟进和解读超分辨率技术的发展趋势,为读者分享有价值的超分辨率方法,欢迎一起探讨交流。
系列文章如下:
【2】OSEDiff
【3】PiSA
【4】DLoRAL
【5】DOVE
【6】HYPIR
【7】SeedVR
【8】FlashVSR
一、研究背景
Diffusion-based的视频恢复(VR)虽然能生成高质量、细节丰富的视频,但通常需要数十步采样,导致计算成本和延迟极高,无法满足现实世界应用(如流媒体、实时编辑)的需求。
而单步Diff的图像复原\超分方法逐步取得了效果突破,成为了一种高效化的技术趋势,但当前多数方法有两个问题:
- 依赖于教师模型,性能受教师模型上限约束;
- 直接应用于视频时,因缺乏时空设计,效果不佳。
针对上述几个问题,该方案推出了一种高效的基于单步扩散的视频复原方法,其核心亮点如下:
-
首次实现"单步"扩散视频恢复: SeedVR2是首个在单步采样内实现高质量视频恢复的扩散模型。
-
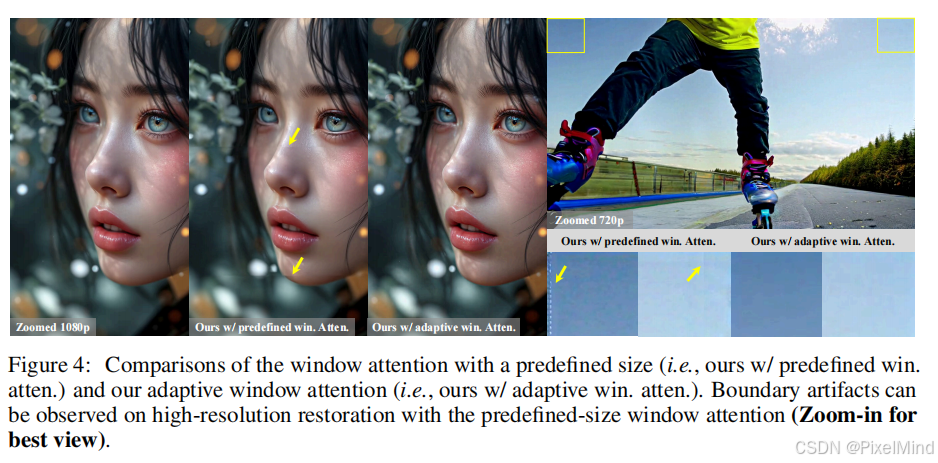
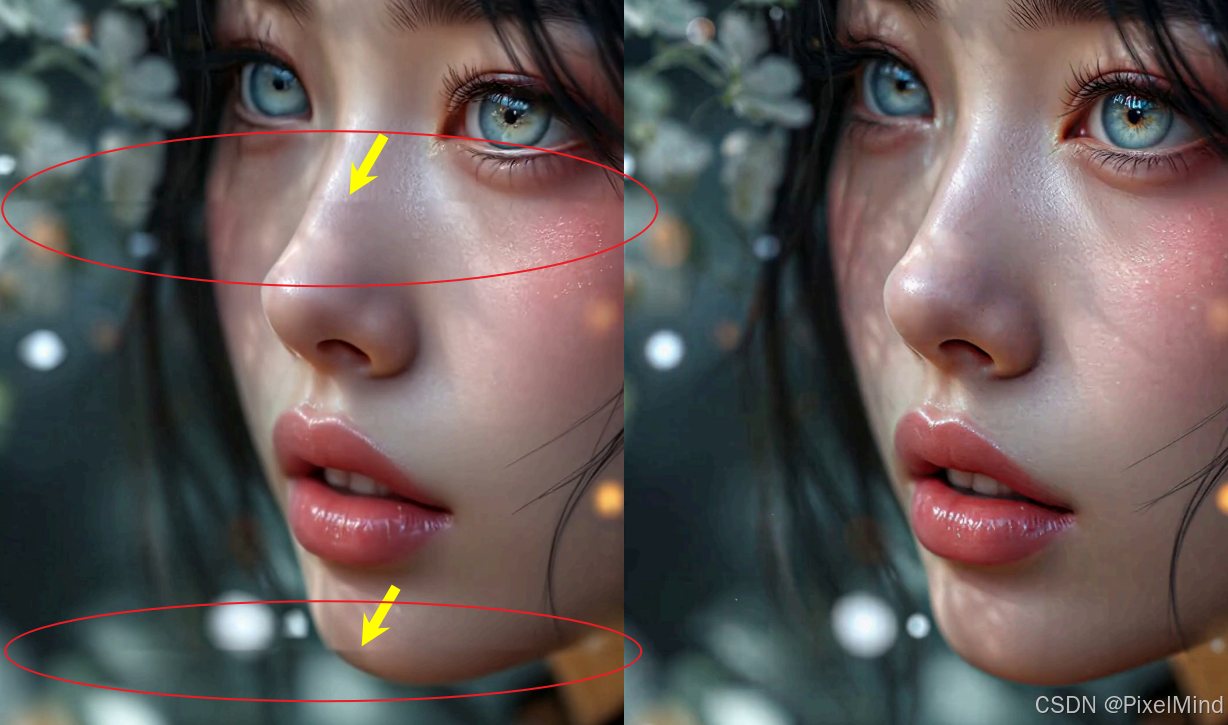
自适应窗口注意力机制: 针对高分辨率视频恢复中预定义窗口大小导致的边界伪影问题,提出了一种动态调整窗口大小的机制。该机制在训练和推理时根据输入分辨率计算窗口尺寸,显著提升了模型在任意分辨率输入下的鲁棒性,是处理高分辨率视频的关键技术。
-
零依赖教师模型的对抗后训练(APT): 与依赖预训练教师模型进行蒸馏的方法不同,SeedVR2直接以一个预训练的扩散模型(SeedVR)为起点,通过对抗性后训练(Adversarial Post-Training, APT)进行端到端微调。这避免了教师模型性能上限的限制,并允许模型在单步内超越初始模型的性能。
-
专为视频恢复设计的训练改进:
-
渐进式蒸馏(Progressive Distillation): 在对抗训练前,先通过渐进式蒸馏(从64步逐步蒸馏到1步)来弥合初始多步模型与目标单步模型之间的巨大鸿沟,稳定训练过程并保持恢复能力。
-
特征匹配损失(Feature Matching Loss): 为解决高分辨率视频训练中计算LPIPS损失成本过高的问题,提出直接从判别器中提取多层特征进行匹配的损失函数。该损失在效率和效果上取得了良好平衡,是稳定大规模对抗训练的关键。
-
改进的损失函数组合: 采用RpGAN损失替代传统的非饱和GAN损失,并结合R1和R2正则化项,有效防止了训练过程中的模式崩溃,提升了训练稳定性。

-
二、方法细节
2.1 预备知识
扩散APT是一种将多步扩散模型转换为一步生成器的扩散加速方法。APT主要有两个训练阶段,即确定性蒸馏 和对抗后训练。
-
确定性蒸馏:按照带有MSE损失的离散时间一致性蒸馏对蒸馏模型进行训练。教师模型采用了固定的classifier-free guidance(CFG)系数和一个预定义的负提示。
-
对抗训练:先通过预训练的扩散网络初始化判别器,然后引入额外的"cross-attention-only transformer blocks" 来生成logits用于损失计算。为了稳定训练和避免高阶梯度计算,APT提出了一个近似的R1损失来正则化判别器,判别器最终损失为非饱和GAN损失和近似化R1损失。
架构示意图如下
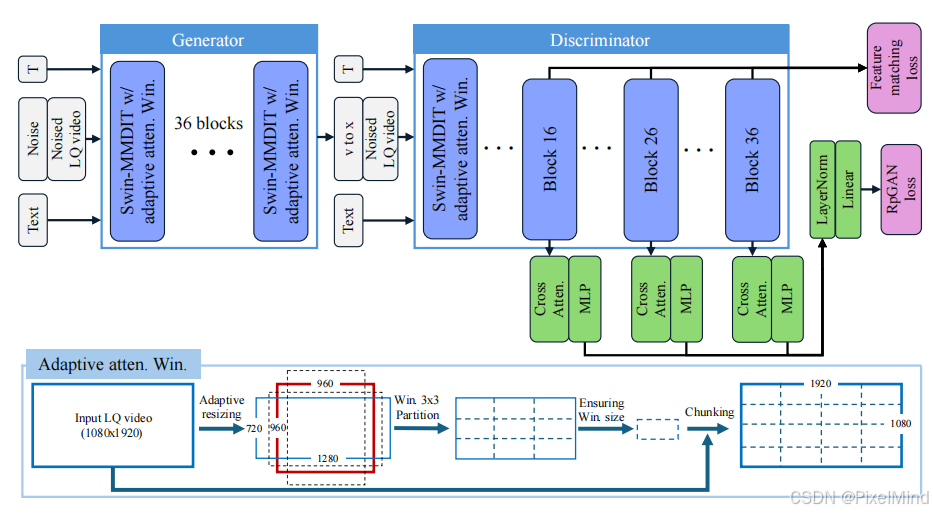
2.2 自适应窗口注意力
文中所提到像SeedVR这样的模型,使用的是预设大小的窗口注意力(例如 64x64)。
在处理高分辨率视频(如 1080p)时,这种固定大小的窗口在图像块(patch)的边界处会产生可见的不连续性(即边界伪影)。这种缺陷源于训练时的分辨率与测试时的分辨率不匹配。
这里提出了一种全新的注意力机制,其核心思想是让窗口大小在一定范围内根据输入的分辨率动态计算。从训练和测试两个阶段来看。
-
训练阶段的窗口计算:
-
给定一个编码后的输入视频特征图 X ∈ R d t × d h × d w × d c X \in \mathbb{R}^{d_t \times d_h \times d_w \times d_c} X∈Rdt×dh×dw×dc,其分辨率为 d h × d w {d_h \times d_w} dh×dw= 45 × 80。
-
在做Swin-MMDIT时,其窗口大小(window size)不是固定的,而是根据输入特征图的尺寸动态计算的。
p t = ⌈ min ( d t , 30 ) n t ⌉ , p h = ⌈ d h n h ⌉ , p w = ⌈ d w n w ⌉ p_t = \left\lceil \frac{\min(d_t, 30)}{n_t} \right\rceil, \quad p_h = \left\lceil \frac{d_h}{n_h} \right\rceil, \quad p_w = \left\lceil \frac{d_w}{n_w} \right\rceil pt=⌈ntmin(dt,30)⌉,ph=⌈nhdh⌉,pw=⌈nwdw⌉其中, n t n_t nt, n h n_h nh, n w n_w nw分别是沿时间维度 d t d_t dt、高度维度 d h d_h dh、宽度维度 d w d_w dw划分的窗口数量。 ⋅ · ⋅是向上取整函数。为了防止训练和推理时序列长度差距过大,对 d t d_t dt设置了一个上限 m i n ( d t , 30 ) min(d_t, 30) min(dt,30)。
-
由于训练数据的宽高比变化很大,即使训练分辨率固定,每次训练时计算出的窗口大小也会随之变化。这种设计迫使模型在训练阶段就学习处理各种不同大小的窗口,从而显著提升了模型在测试时对不同分辨率输入的泛化能力。
-
测试阶段的窗口计算:
为了进一步提高模型在高分辨率输入下的鲁棒性,测试时引入了一个"分辨率一致性窗口划分策略"。

-
给定一个测试时的视频特征图 X ^ ∈ R d ^ t × d ^ h × d ^ w × d ^ c \hat{X} \in \mathbb{R}^{\hat{d}_t \times \hat{d}_h \times \hat{d}_w \times \hat{d}_c} X^∈Rd^t×d^h×d^w×d^c 。
-
首先,计算一个"空间代理分辨率"(spatial proxy resolution) d ~ h × d ~ w {\tilde{d}_h \times \tilde{d}_w} d~h×d~w。
d ~ h = d h × d w × d ^ h d ^ w , d ~ w = d h × d w × d ^ w d ^ h \tilde{d}_h = \sqrt{d_h \times d_w \times \frac{\hat{d}_h}{\hat{d}_w}}, \quad \tilde{d}_w = \sqrt{d_h \times d_w \times \frac{\hat{d}_w}{\hat{d}_h}} d~h=dh×dw×d^wd^h ,d~w=dh×dw×d^hd^w-
这个代理分辨率的宽高比 必须与测试输入的宽高比完全一致, d ~ h × d ~ w = d ^ h × d ^ w {\tilde{d}_h \times \tilde{d}_w = \hat{d}_h \times \hat{d}_w} d~h×d~w=d^h×d^w。
-
同时,这个代理分辨率的面积 必须与训练时的分辨率面积相同, d ~ h × d ~ w {\tilde{d}_h \times \tilde{d}_w} d~h×d~w = d h × d w {d_h \times d_w} dh×dw = 45 × 80。
-
然后,将这个代理分辨率 d ~ h × d ~ w = d ^ h × d ^ w {\tilde{d}_h \times \tilde{d}_w = \hat{d}_h \times \hat{d}_w} d~h×d~w=d^h×d^w代入到计算窗口的公式(公式1),与测试时的时间维度 d ^ t \hat{d}_t d^t一起,计算出最终的测试时窗口大小。
-
这个策略确保了测试时的窗口划分方式,在"空间"维度上,与训练时的划分方式在"比例"和"密度"上保持一致,从而最大限度地减少了因分辨率变化带来的不一致性,巧妙地解决了固定窗口在高分辨率视频修复中导致的边界伪影问题。如下图所示。
2.3 训练相关
这部分主要是解决两个问题:1. 如何得到高质量的单步扩散模型?;2. 如何稳定地进行对抗训练?
为此,SeedVR2采用了两大策略:渐进式蒸馏 和损失改进。
1️⃣ 渐进式蒸馏 progressive distillation
初始模型与目标模型之间的差距较大,直接训练可能会削弱单步模型的能力。为了缓解这以问题,借鉴了渐进式蒸馏的思想。
-
从64步,逐步降到32步、16步、8步、4步、2步,最后到1步。
-
每个蒸馏过程约10K次迭代。
-
采用最简单的MSE损失函数。
-
逐步增加训练数据的时间维度,从图像到不同帧数的视频。
最终,从一个7B参数的模型,蒸馏出一个3B参数的模型,性能几乎不降,实现了"小而强"的效果!
2️⃣ 损失函数改进 Loss Improvement
作者要训练的是"史上最大的视频修复GAN"(生成器+判别器总参数量约16B),对抗训练极其不稳定。
怎么办?策略如下:
-
受R3GAN启发,改用 RpGAN(Relativistic GAN)损失代替传统GAN损失。不是直接判断"真/假",而是判断"比平均真实度高或低"。
-
引入R2正则化,惩罚判别器在"假数据"上的梯度范数 ,防止其对假数据过于敏感。公式如下:
L a R 2 = ∥ D ( x ^ , c ) − D ( N ( x ^ , σ I ) , c ) ∥ 2 \mathcal{L}_{aR2} = \|D(\hat{x}, c) - D(\mathcal{N}(\hat{x}, \sigma \mathbf{I}), c)\|_2 LaR2=∥D(x^,c)−D(N(x^,σI),c)∥2其中 x x x (表示从模型输出的速度场转换而来的样本预测, c c c是文本条件, σ σ σ控制扰动高斯噪声的方差, I I I表示单位矩阵。作者表示,上述损失改进保证了在训练数千次迭代也没有出现模式崩溃,训练将会更加稳定。
-
引入特征匹配损失。除了GAN Loss,还有L1和LPIPS Loss,这在像素空间计算会很费算力。于是,这里采用特征匹配损失,直接从判别器的第16、26、36层(即"仅交叉注意力的Transformer块"之前),提取特征。并且计算生成视频和真实视频在这些特征层上的L2距离 。
L F = 1 3 ∑ i = 16 , 26 , 36 ∥ D i F ( x ^ , c ) − D i F ( x , c ) ∥ 1 \mathcal{L}F = \frac{1}{3} \sum{i=16,26,36} \|D_i^F(\hat{x}, c) - D_i^F(x, c)\|_1 LF=31i=16,26,36∑∥DiF(x^,c)−DiF(x,c)∥1
除此之外,还对损失权重做了精细调整:
-
生成器训练时 :L1损失、特征匹配损失、GAN损失的权重都设为 1.0。
-
判别器训练时:GAN损失权重 = 1.0;R1 和 R2 正则化权重 = 1000(大权重,强制稳定)
三、实验论证
训练: 在72块NVIDIA H100-80G GPU上训练,使用约100帧720p的视频作为每批次数据。首先从头训练一个7B的SeedVR模型,然后在此基础上进行SeedVR2的对抗后训练。
数据集: 合成数据集(SPMCS, UDM10, REDS30, YouHQ40)和真实世界数据集(VideoLQ, AIGC28)。
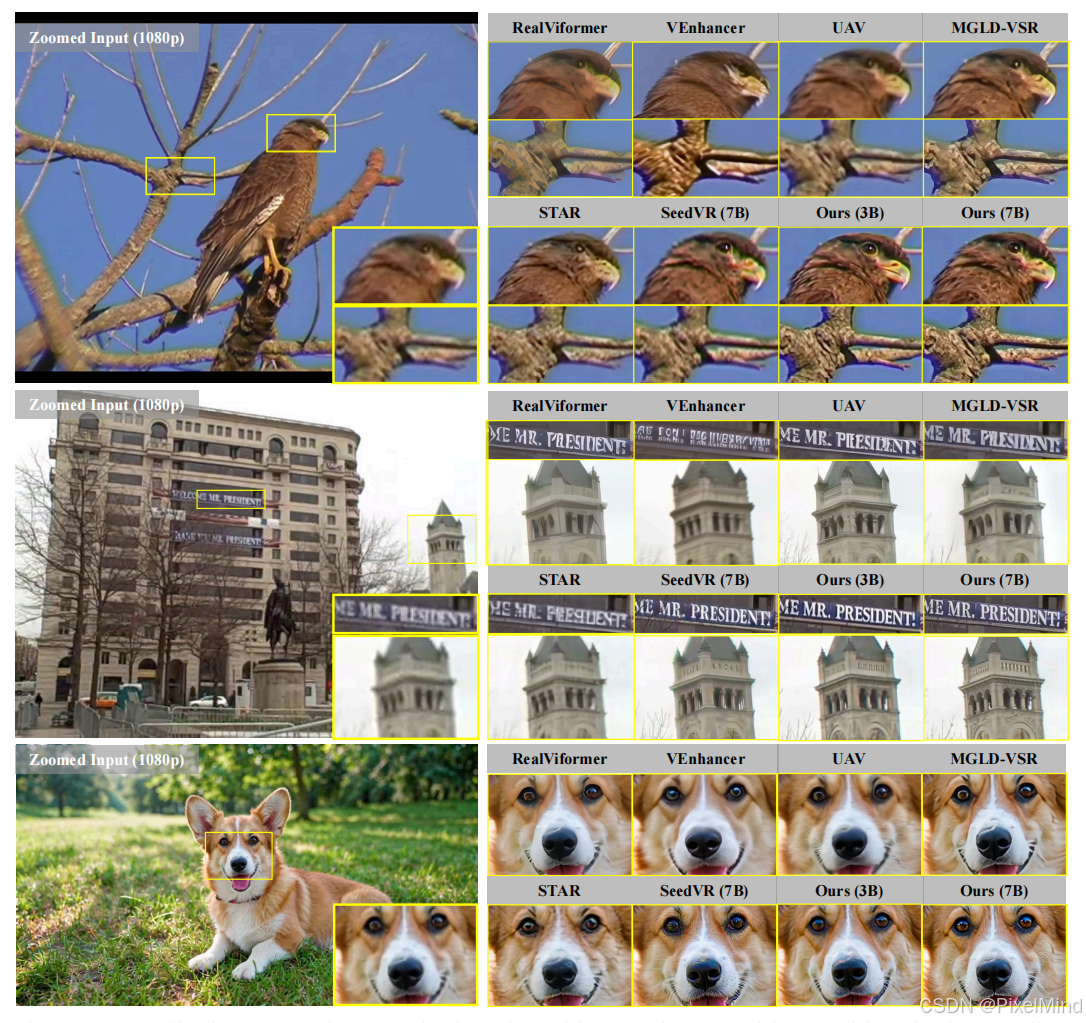
对比方法: 与当前最先进的视频恢复方法进行比较,包括基于GAN的方法(RealViformer)、基于扩散的多步方法(VEnhancer, UAV, MGLD-VSR, STAR, SeedVR)等。
3.1 定量结果
SeedVR2在多个合成数据集上,尤其是在感知指标LPIPS和DISTS上,表现优于或与SOTA方法相当。在真实世界数据集VideoLQ上,其NIQE、MUSIQ和DOVER得分与基线相当;在AIGC数据集上,其所有指标均取得了最高分。

效率对比: SeedVR2(7B模型)的推理时间(约299.4秒/100帧720p视频)比其他需要50步的扩散模型(如VEnhancer的2029.2秒)快4倍以上,证明了其巨大的效率优势。

3.2 定性结果
用户研究显示,SeedVR2(特别是3B模型)在视觉质量上明显优于其他所有方法,在视觉保真度上与多步的SeedVR相当。

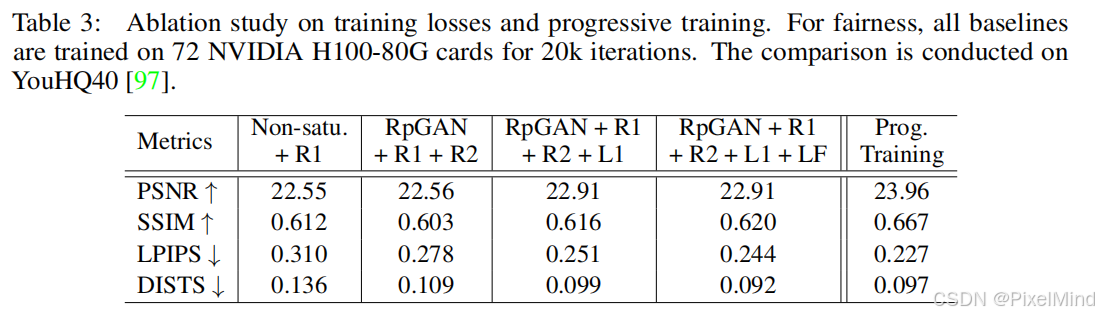
3.3 消融实验
自适应窗口的作用已经在上面展示过了。其他方面的改进有效性如下表所示。例如,采用RpGAN+R1+R2损失比原始APT损失在感知指标上大幅提升;加入L1和特征匹配损失进一步优化了性能;渐进式蒸馏对最终性能至关重要。
四、总结和思考
SeedVR2是首个通过对抗后训练实现单步视频恢复的扩散模型。它通过引入自适应窗口注意力机制 、渐进式蒸馏 、特征匹配损失等一系列针对视频恢复的创新设计,成功地将一个需要多步采样的扩散模型转化为一个高效、高质量的单步生成器。
实验表明,SeedVR2不仅在效率上比现有方法快4倍以上,而且在视觉质量和客观指标上也达到了相当甚至更优的水平。尽管目前仍存在对视频VAE效率的依赖以及在极端退化情况下的鲁棒性问题,但SeedVR2为未来的视频恢复研究提供了重要的思路和强大的基线模型。
感谢阅读,欢迎留言或私信,一起探讨和交流。
如果对你有帮助的话,也希望可以给博主点一个关注,感谢。