视频讲解:https://www.bilibili.com/video/BV1nVqDBTEma/?vd_source=5ba34935b7845cd15c65ef62c64ba82f
代码仓库:https://github.com/LitchiCheng/mujoco-learning
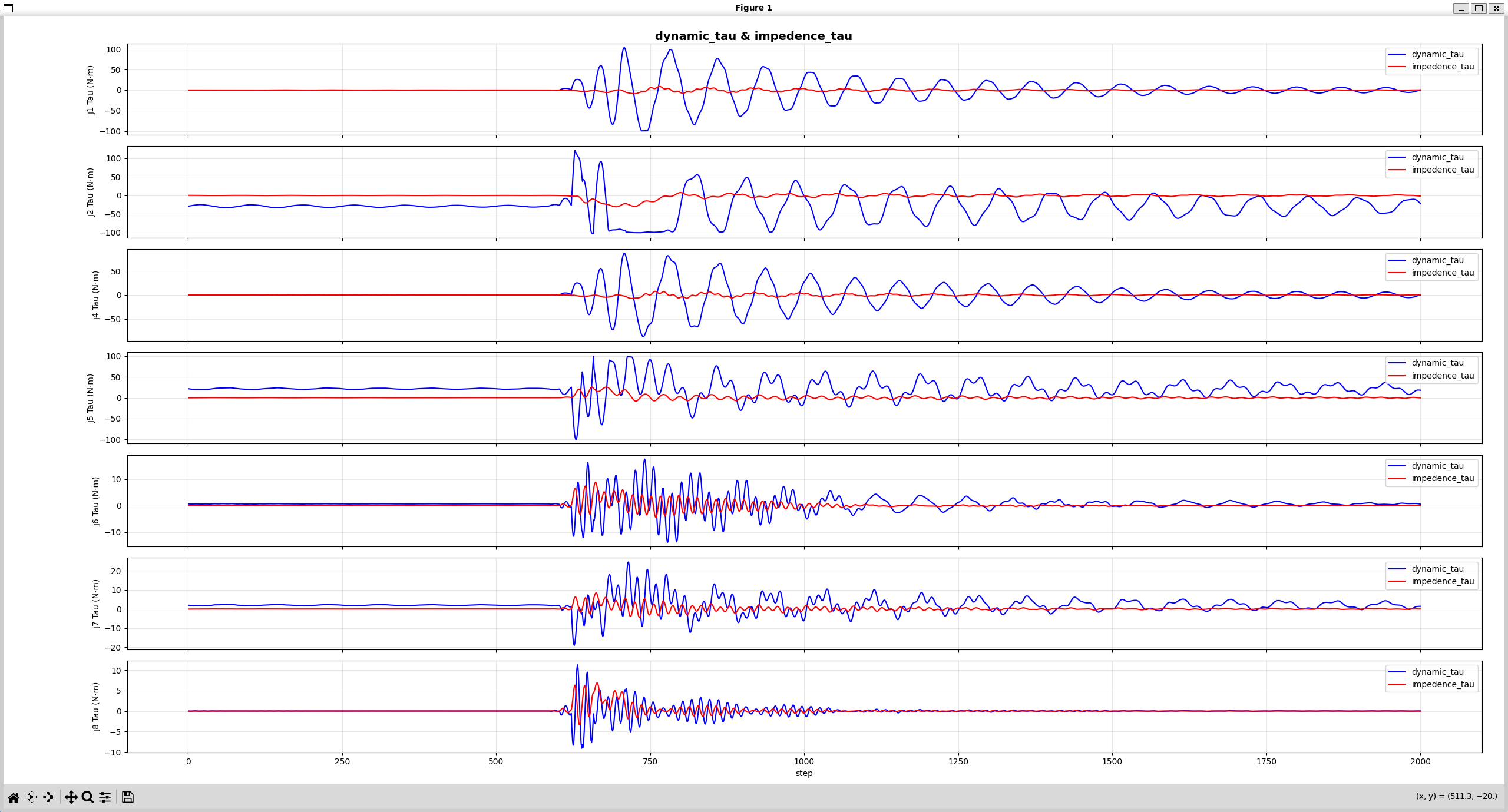
今天介绍下机械臂高级控制,使用 pinocchio 的动力学方法 RNEA(递归牛顿-欧拉算法 Recursive Newton Euler Alogrithm)进行逆运动学,包含重力、科氏 / 离心力、惯性力三项补偿
使用的 URDF 中的惯性参数、质量质心等,参数基本正确但实际还是存在误差,故再使用阻抗进行补偿维持当前位置。
动力学补偿需要输入当前关节位置、当前关节速度、当前关节加速度,对应核心公式如下:
τ=M(q)q¨+C(q,q˙)q˙+G(q)
q 关节位置
q˙ 关节速度
q¨ 关节加速度
M 惯性力
C 科氏力、离心力
G 重力
对应在mujoco场景下,逆动力学 Tau 计算代码如下,这里期望保持当前位置不动,可以给 a 即加速度为 0(给真实值也可以,看目标期望是什么)
q = self.data.qpos[:7]
v = self.data.qvel[:7]
a = np.zeros(7)
v = np.concatenate((v, np.zeros(2)))
q = np.concatenate((q, np.zeros(2)))
a = np.concatenate((a, np.zeros(2)))
dynamic_tau = pin.rnea(self.pin_model, self.pin_data, q, v, a)这里存在一定误差(模型参数不准等)使得纯靠动力学无法完全维持当前位置,故可以通过阻抗控制也会拉回期望位置,阻抗控制核心如下
self.Kp = np.diag([100] * 7)
self.Kd = np.diag([10] * 7)
error = self.initial_pos - q
impedence_tau = self.Kp @ error[:7] - self.Kd @ v[:7]完整代码如下,2000步后打印阻抗补偿和动力学补偿的曲线图。
import mujoco_viewer
import time
import mujoco
import numpy as np
from scipy.spatial.transform import Rotation as R
import matplotlib.pyplot as plt
import pinocchio as pin
class PandaEnv(mujoco_viewer.CustomViewer):
def __init__(self, scene_xml, arm_xml):
super().__init__(scene_xml, 3, azimuth=-45, elevation=-30)
self.scene_xml = scene_xml
self.arm_xml = arm_xml
self.initial_pos = self.model.key_qpos[0]
self.data.qpos[:7] = self.initial_pos[:7]
self.data.qvel[:7] = np.zeros(7)
self.step = 0
self.step_list = []
self.dynamics_tau_list = []
self.damping_tau_list = []
def runBefore(self):
self.pin_model = pin.RobotWrapper.BuildFromMJCF(self.arm_xml).model
self.pin_data = self.pin_model.createData()
def runFunc(self):
q = self.data.qpos[:7]
v = self.data.qvel[:7]
a = np.zeros(7)
v = np.concatenate((v, np.zeros(2)))
q = np.concatenate((q, np.zeros(2)))
a = np.concatenate((a, np.zeros(2)))
dynamics_tau = pin.rnea(self.pin_model, self.pin_data, q, v, a)
IMPENDANCE_COMPENSATION = True
if IMPENDANCE_COMPENSATION:
self.Kp = np.diag([100] * 7)
self.Kd = np.diag([10] * 7)
else:
self.Kp = np.diag([0] * 7)
self.Kd = np.diag([0] * 7)
error = self.initial_pos - q
impedence_tau = self.Kp @ error[:7] - self.Kd @ v[:7]
impedence_tau = np.concatenate((impedence_tau, np.zeros(2)))
tau = dynamics_tau + impedence_tau
self.data.ctrl[:7] = tau[:7]
print(f"Total Torque: {np.round(tau[:7], 2)}")
print(f"impedence_tau: {np.round(impedence_tau[:7], 2)}")
self.step += 1
self.step_list.append(self.step)
self.dynamics_tau_list.append(dynamics_tau[:7].copy())
self.damping_tau_list.append(impedence_tau[:7].copy())
# if self.step >= 2000:
# self.plotTorque()
if __name__ == "__main__":
SCENE_XML = "model/franka_emika_panda/scene_tau.xml"
ARM_XML = "model/franka_emika_panda/panda_tau.xml"
env = PandaEnv(SCENE_XML, ARM_XML)
env.run_loop()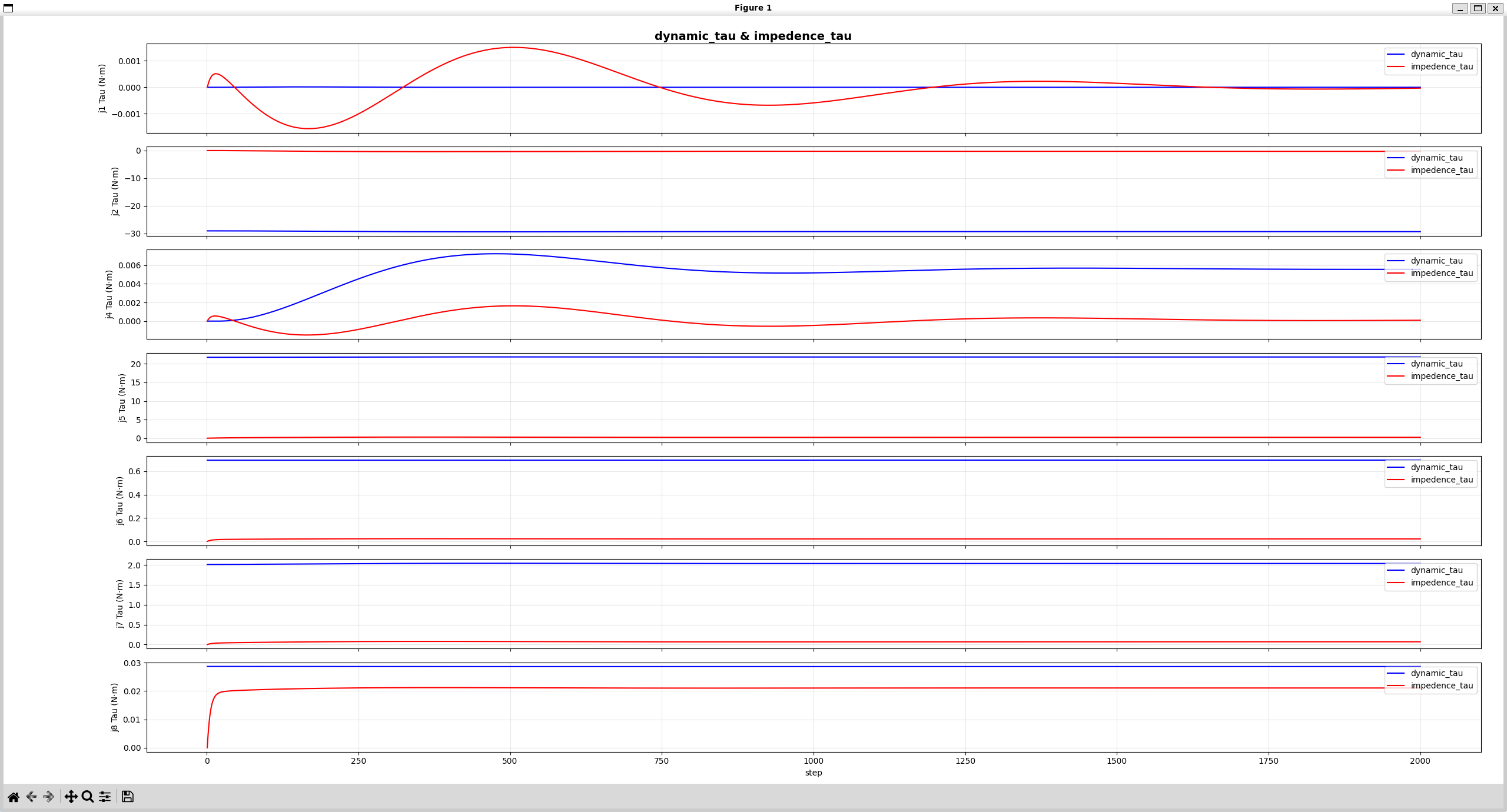
维持 home 位置
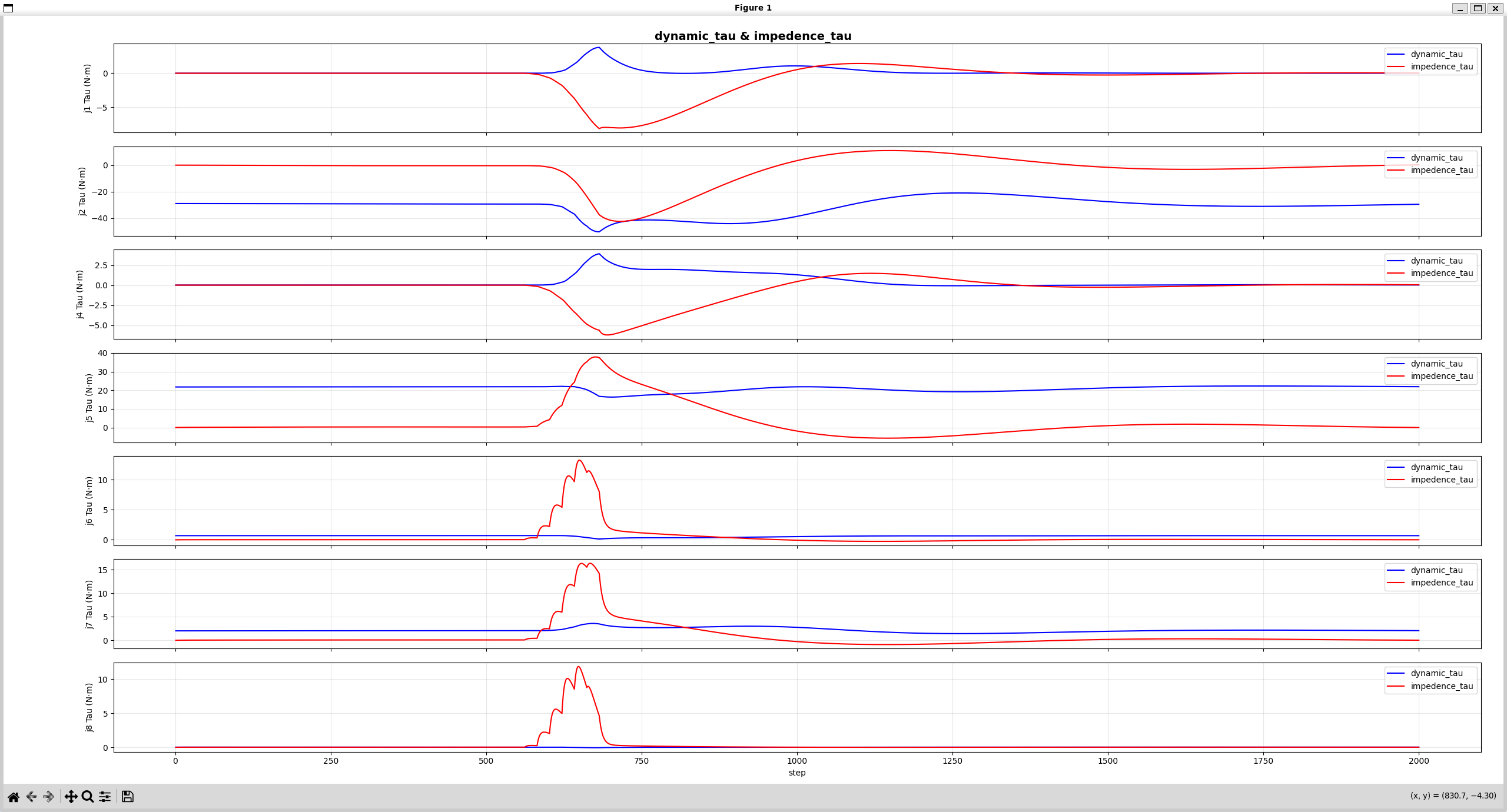
维持 home 位置+在末端增加一个力扰动
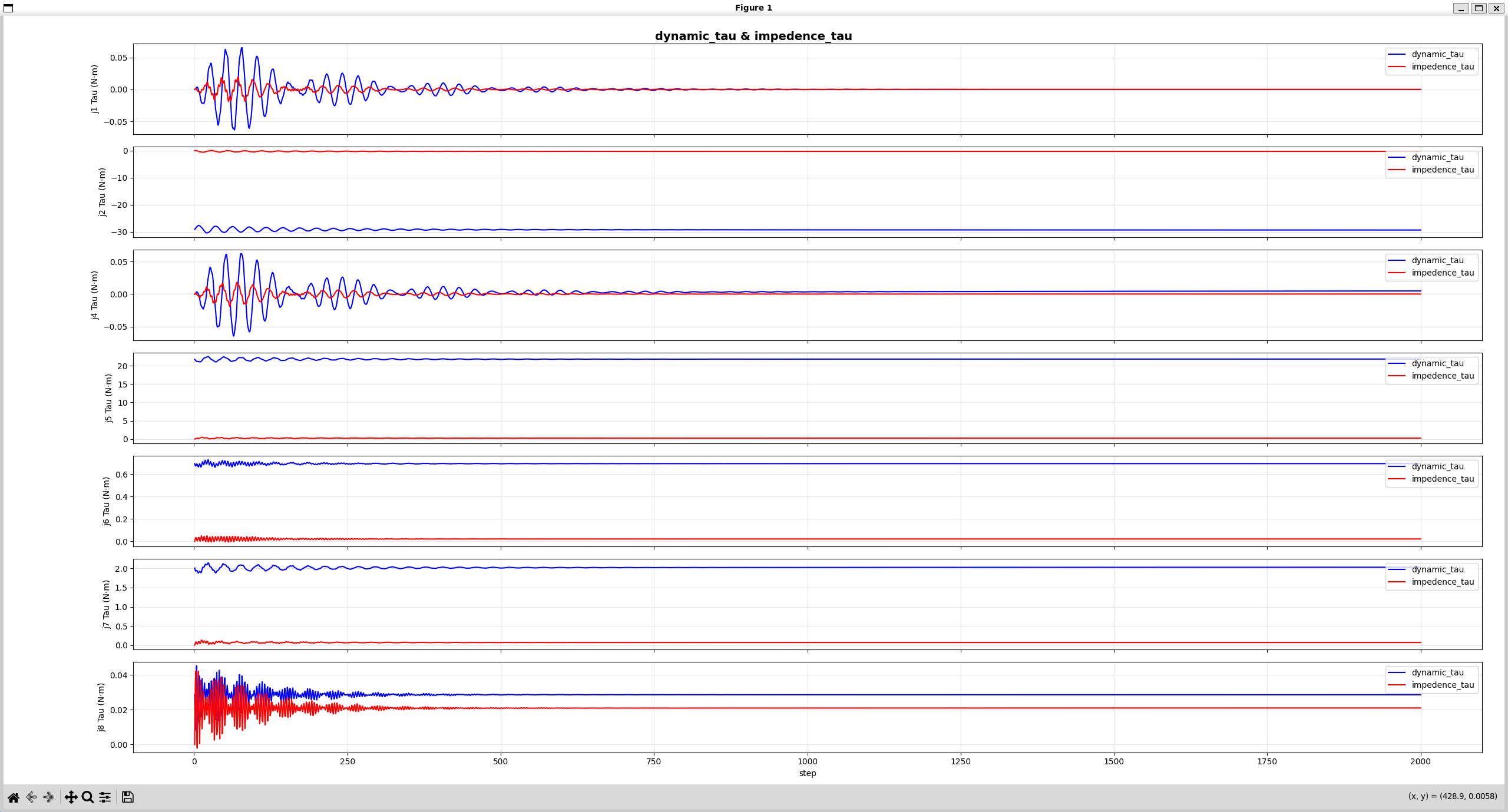
维持 home 位置+调整阻抗系数
维持 home 位置+调整阻抗系数+增加末端力扰动