在计算机视觉领域,"颜色" 是最直观的特征之一,无论是车道线检测、物体识别还是图像分割,精准的颜色过滤都是核心基础。但直接使用日常熟知的 RGB 空间做颜色筛选,往往会被光照、阴影、反光等因素干扰,而 HSV、LAB 等色彩空间则能完美解决这一痛点。
适合过滤的颜色空间:HSV
HSV(色相 Hue、饱和度 Saturation、明度 Value)是为 "人类视觉感知" 设计的颜色空间,它将颜色拆分为三个独立维度,完美解决了 RGB 的耦合问题。
| 通道 | 取值范围 | 通俗理解 | 过滤作用 |
|---|---|---|---|
| H(色相) | 0-179 | 颜色的 "种类"(如红、黄、绿) | 锁定目标颜色的固定区间(如黄色 = 20-30) |
| S(饱和度) | 0-255 | 颜色的 "鲜艳程度"(0 = 灰度,255 = 纯彩色) | 区分 "彩色目标" 和 "灰度背景"(如白色车道线 S≈0) |
| V(明度) | 0-255 | 颜色的 "亮度"(0 = 纯黑,255 = 纯白) | 过滤阴影(低 V)、过曝(高 V),只保留有效亮度区域 |
HSV 的核心优势:解耦
过滤的本质是 "维度解耦":将耦合的 RGB 拆分为独立的颜色 / 亮度维度,降低阈值筛选难度;
RGB转成HSV
python
# 转换到HSV的颜色空间
hsv = cv2.cvtColor(image, cv2.COLOR_RGB2HSV)举个例子:
- 黄色车道线:无论晴天还是阴天,H 值始终在 20-30 之间,只需调整 V 值即可适配亮度;
- 白色车道线:无需限制 H 值,只需锁定 "S<30(低饱和度)+ V>180(高亮度)",就能避开所有彩色干扰。
示例代码(以 "提取黄色 / 白色车道线" 为例)
python
import cv2
import numpy as np
def color_based_filtering(image):
# HSV空间过滤(识别黄色/白色车道线)
hsv = cv2.cvtColor(image, cv2.COLOR_BGR2HSV)
# 白色区域
lower_white = np.array([0, 0, 180])
upper_white = np.array([180, 30, 255])
white_mask = cv2.inRange(hsv, lower_white, upper_white)
# 黄色区域
lower_yellow = np.array([20, 100, 100])
upper_yellow = np.array([30, 255, 255])
yellow_mask = cv2.inRange(hsv, lower_yellow, upper_yellow)
# 合并车道线颜色掩码
lane_color_mask = cv2.bitwise_or(white_mask, yellow_mask)
return lane_color_mask
if __name__ == "__main__":
# 读取测试图片(替换为你的车道图片路径)
img = cv2.imread("1.png")
# 缩放图片(可选,适配显示)
img = cv2.resize(img, (640, 480))
lane_color_mask = color_based_filtering(img)
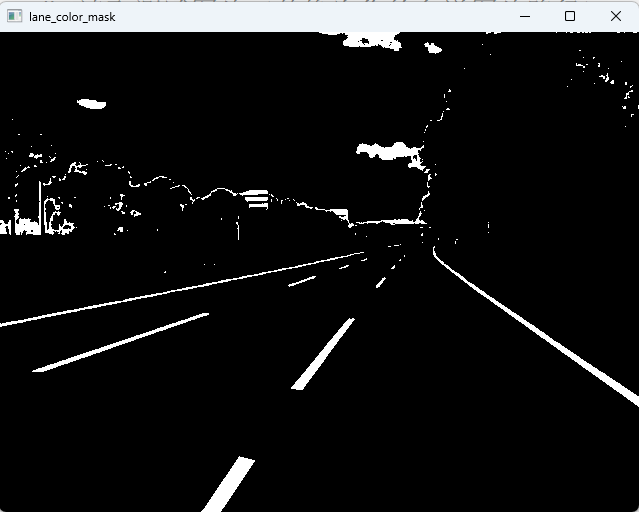
cv2.imshow("lane_color_mask", lane_color_mask)
cv2.waitKey(0)
cv2.destroyAllWindows()-
cv2.inRange:核心过滤函数,筛选出 HSV 值在指定区间内的像素,生成二值掩码(255 = 目标颜色,0 = 背景);
-
掩码合并 :通过
cv2.bitwise_or合并多颜色掩码,支持扩展到红色、绿色等其他颜色;
运行效果
原图

过滤后掩码图(除了车道线还有白云、建筑也是白的被保留下来)
总结
易受相似颜色背景干扰:颜色过滤仅关注 "颜色特征",无法区分 "目标物体" 和 "背景中相似颜色的干扰物":
- 车道线检测中:黄色路牌、白色车辆、灰色路面反光都会触发黄 / 白色阈值,导致掩码中混入大量噪点;
- 其他场景:用 HSV 过滤红色苹果时,红色广告牌、花瓣会被误判为目标。
颜色空间过滤的核心缺点是对动态光照敏感、易受相似颜色干扰、特征单一,本质是 "单一维度筛选无法适配复杂场景"。