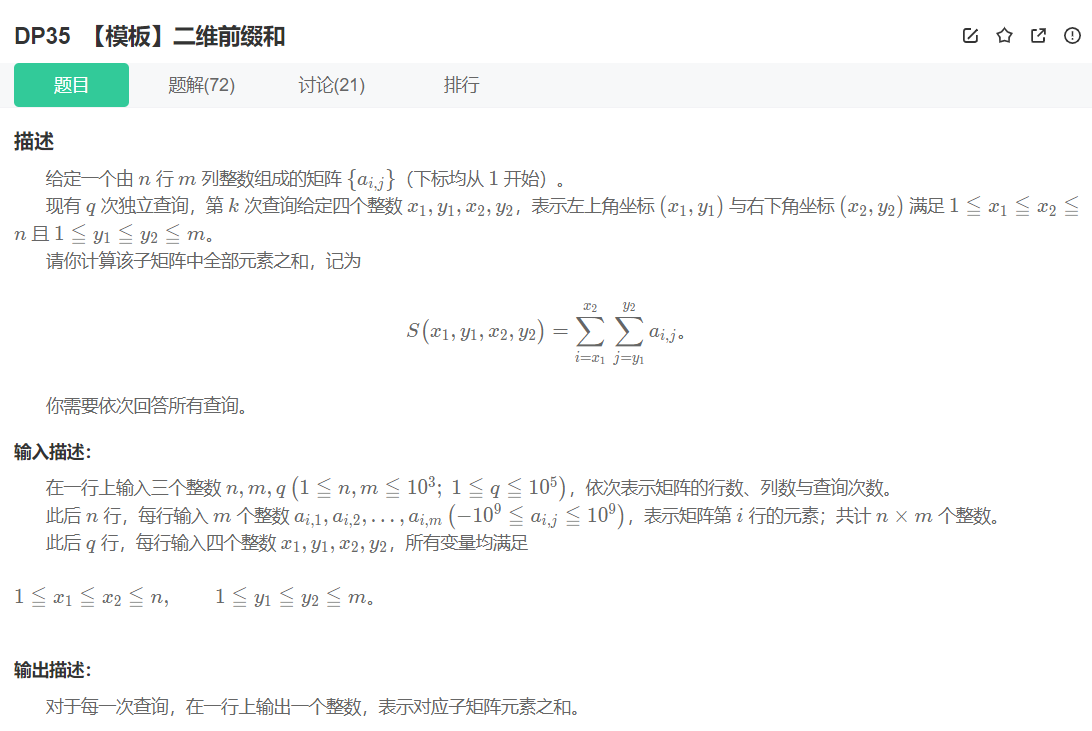
前缀和与差分是一对关联性十分强的两个算法,都是对一段数组进行操作,一个是累加,一个是两两相减,话不多说上干货!!!
前缀和
前缀和分一维和二维两种,这里我主要分析二维的,一维的比较简单;
以以前写的代码展开详细描述与解释,并附上题目
cpp
int main()
{
int n,m,q;
cin>>n>>m>>q;
vector<vector<int>> arr(n+1,vector<int>(m+1));
for(int i=1;i<=n;i++)
{
for(int j=1;j<=m;j++)
{
cin>>arr[i][j];
}
}
vector<vector<long long>> ret(n+1,vector<long long>(m+1));
for(int i=1;i<=n;i++)
{
for(int j=1;j<=m;j++)
{
ret[i][j]=ret[i-1][j]+ret[i][j-1]+arr[i][j]-ret[i-1][j-1];
}
}
int x1,x2,y1,y2;
while(q--)
{
cin>>x1>>y1>>x2>>y2;
cout<<ret[x2][y2]-ret[x1-1][y2]-ret[x2][y1-1]+ret[x1-1][y1-1]<<endl;
}
return 0;
}以i,j为例,若以i,j为例,retij的值为以1,1为左上角到以i,j为右下角中所有位置的和;但是若一直使用for循环从左上角遍历到右下角进行累加,那时间复杂度太高了,不可取;所以我们应该复用之前的位置进行计算;分为两种情况,一种是求整块的面积;一种是求阴影部分的面积
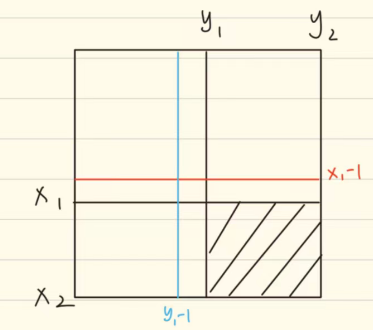
- 求阴影部分的面积
在计算此阴影部分的面积,我们应该利用x1-1,y2x2,y1-1x1-1,y1-1这三个点;因为以x1-1,y2与x2,y1-1位置为右下角的两个部分有重叠部分,多减的部分要加回来,即以x1-1,y1-1为右下角部分面积,由此我们可以推出公式:
S阴影=retx2y2-retx1-1y2-retx2y1-1+retx1-1y1-1
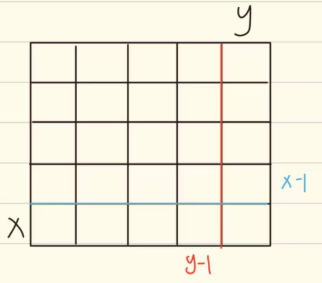
- 求整块的面积
在计算此阴影部分的面积,我们应该利用x-1,yx,y-1x-1,y-1x,y这四个点;因为以x-1,y与x,y-1位置为右下角的两个部分有重叠部分,多加的部分要减回来,即以x-1,y-1为右下角部分面积,最后,还需要加上原数组中的右下角的元素x,y,由此我们可以推出公式:
retxy=retx-1y+retxy-1-retx-1y-1+arrxy
注:以上虽然是模板,但是因为变量较多,不建议背诵,需要大家私底下自己画图推导,方为上策!!!
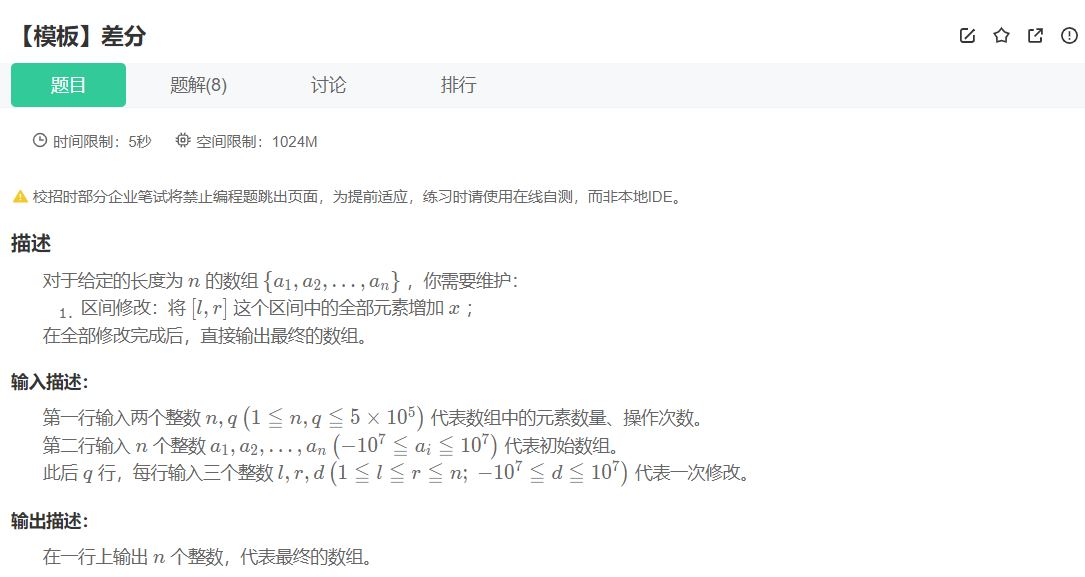
差分
差分分为一维与二维,与前缀和不同,差分这个概念我们比较陌生,所以,应该我会把一维与二维都详细推导一遍;
以以前写的代码展开详细描述与解释,并附上题目
- 一维差分
cpp
typedef long long ll;
const int N = 5e5 + 10;
ll f[N];//差分数组
int main()
{
int n, q;
cin >> n >> q;
for (int i = 1; i <= n; i++)
{
int x;
cin >> x;
f[i] += x;
f[i + 1] -= x;
}
while (q--)
{
ll l, r, k;
cin >> l >> r >> k;
f[l] += k;
f[r + 1] -= k;
}
for (int i = 1; i <= n; i++)
{
f[i] = f[i - 1] + f[i];
cout << f[i] << " ";
}
return 0;
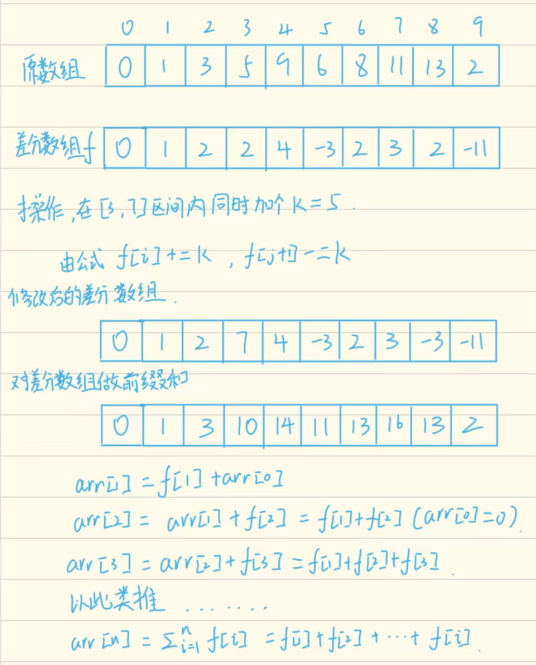
}一维差分介绍:一维差分 是一种用于高效处理数组区间更新与查询 的技巧,其核心思想是通过构造一个差分数组,将对原数组的区间批量修改 操作转化为差分数组的单点修改 ,从而将时间复杂度从 O(n) 优化到 O(1),常与前缀和配合使用
- 具体过程如下
差分数组初始化:d1=a1di=ai−ai−1(2≤i≤n)
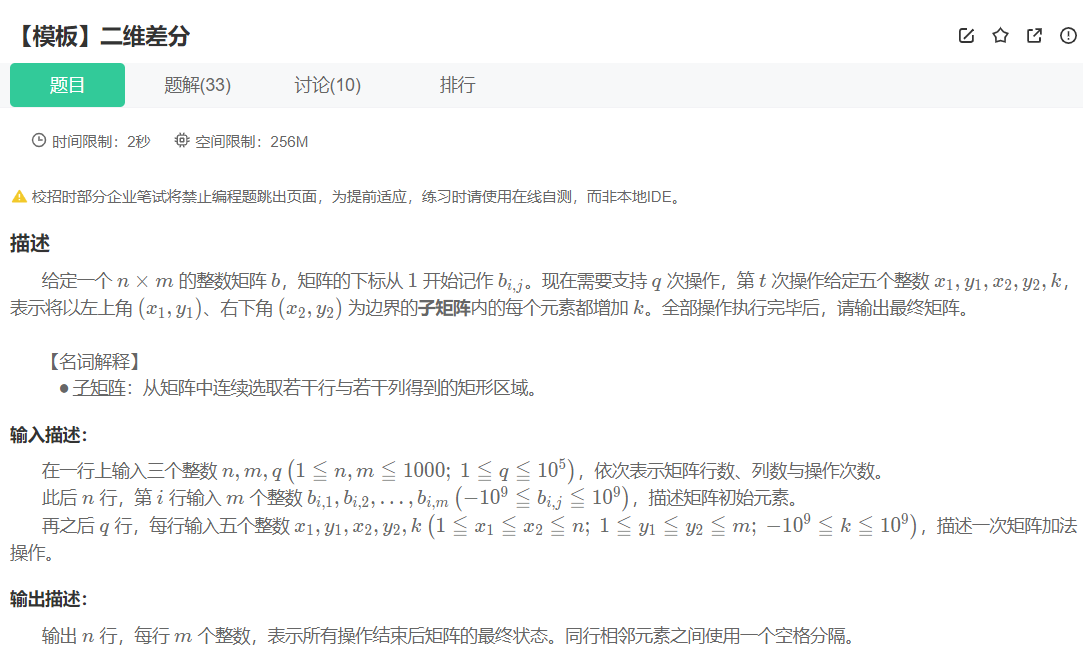
- 二维差分
cpp
typedef long long LL;
const int N=1010;
int n,m,q;
LL f[N][N];
void insert(int x1,int y1,int x2,int y2,LL k)
{
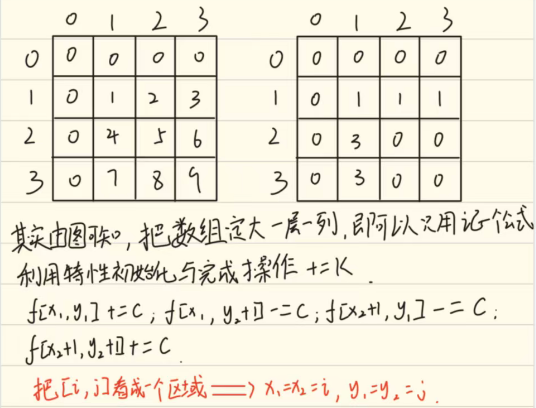
f[x1][y1]+=k;f[x1][y2+1]-=k;f[x2+1][y1]-=k;f[x2+1][y2+1]+=k;
}
int main()
{
cin>>n>>m>>q;
for(int i=1;i<=n;i++)
{
for(int j=1;j<=m;j++)
{
int x;cin>>x;
insert(i,j,i,j,x);
}
}
while(q--)
{
int a,b,c,d,k;cin>>a>>b>>c>>d>>k;
insert(a,b,c,d,k);
}
for(int i=1;i<=n;i++)
{
for(int j=1;j<=m;j++)
{
f[i][j]=f[i-1][j]+f[i][j-1]-f[i-1][j-1]+f[i][j];
cout<<f[i][j]<<" ";
}
cout<<endl;
}
return 0;
}二维差分介绍:二维差分是一维差分的扩展,用于高效处理二维数组的矩形区域批量更新,核心目标是将矩形区域的加 / 减操作从 O(nm) 的时间复杂度优化为 O(1),常与二维前缀和配合使用,广泛应用于矩阵区间修改、图像处理等场景
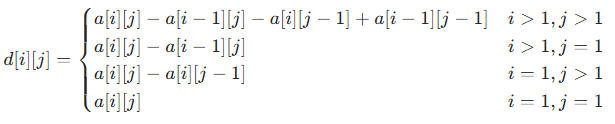
- 具体过程如下
初始化差分数组
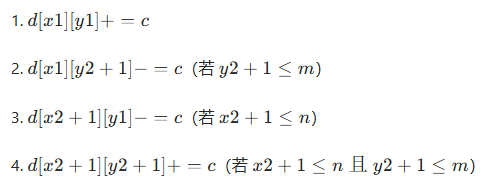
操作二维数组
优化
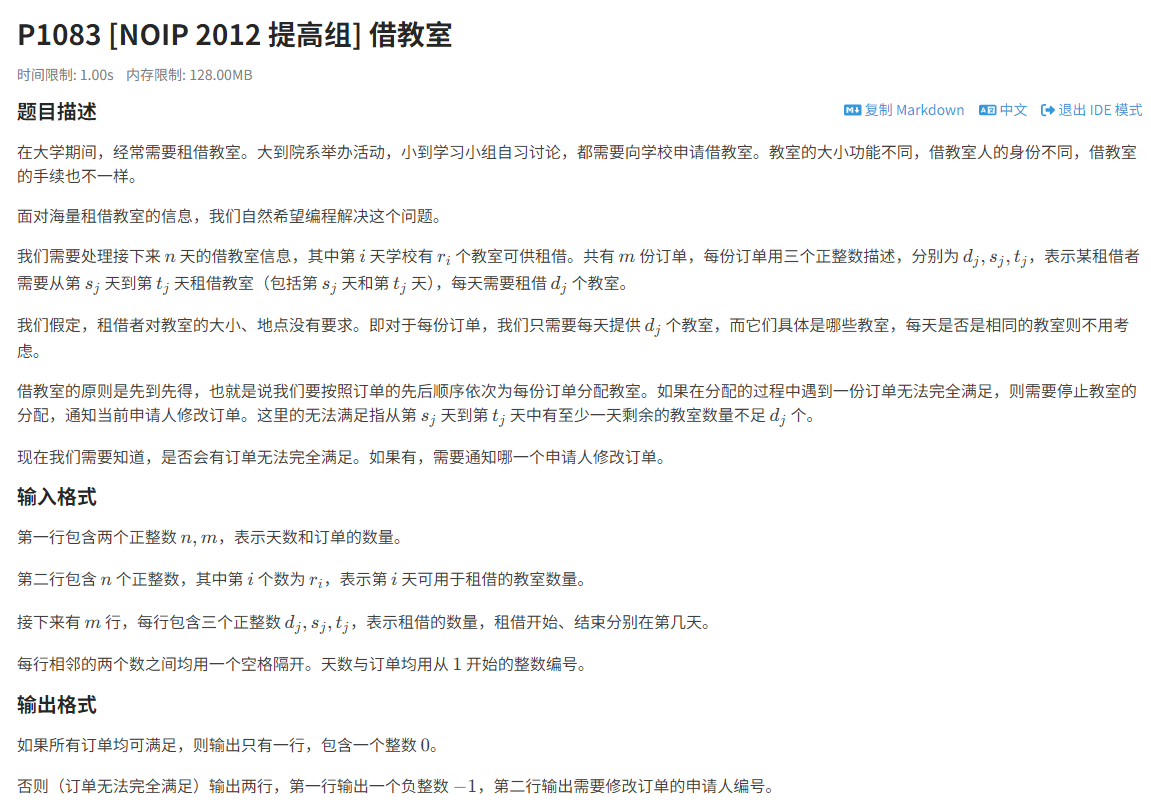
- 综合练习------借教室
这是一道综合二分和差分和前缀和的综合题,有助于提升大家可以写写看
cpp
const int N=1e6+10;
int f[N],r[N];
int d[N],s[N],t[N];
int n,m;
//1到x天的订单情况
bool check(int x)
{
//初始化整个差分数组
for(int i=1;i<=n;i++)
f[i]=r[i]-r[i-1];
//在对应区间减去教室数
//对应的
for(int i=1;i<=x;i++)
{
f[s[i]]-=d[i];
f[t[i]+1]+=d[i];
}
//还原整个数组数组
for(int i=1;i<=n;i++)
{
f[i]=f[i-1]+f[i];
if(f[i]<0) return false;
}
return true;
}
int main()
{
cin>>n>>m;
for(int i=1;i<=n;i++) cin>>r[i];
for(int i=1;i<=m;i++) cin>>d[i]>>s[i]>>t[i];
int l=1,r=m;
while(l<r)
{
int mid=(l+r)/2;
if(check(mid)) l=mid+1;
else r=mid;
}
//判断结果这个点
if(check(l)) cout<<0<<endl;
else cout<<-1<<endl<<l<<endl;;
return 0;
}