当机器人离开实验室,走进工厂的嘈杂产线、家庭的复杂环境,甚至需要与人进行肢体互动时,一个长期被低估的瓶颈便会浮出水面:它如何感知并控制"力量"?
在机器人研发领域,一个日益清晰的共识是:视觉让机器人"看见"世界,而力觉才让机器人真正"触摸"并安全地与这个世界交互。缺乏精细力觉的机器人,就像失去了皮肤触觉和肌肉反馈的人,动作僵硬、互动危险,难以胜任精密或需要柔顺交互的任务。在这一进化路径上,六维力传感器 与关节力矩传感器 构成了不可或缺的底层感知基石。

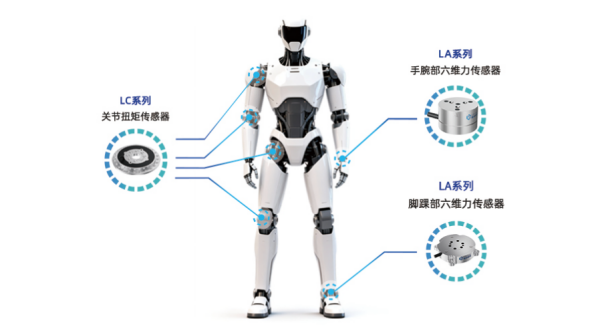
六维力传感器:机器人与世界的"交互界面"
六维力传感器通常被集成于机器人的末端执行器(如"手腕"或"脚踝"),其核心功能是实时测量三维空间中的全部力与力矩分量(Fx, Fy, Fz, Mx, My, Mz)。可以将其理解为机器人与物理世界进行精细操作的"对话接口"。
它的重要性在于突破了纯视觉方案的局限性。例如,在精密装配中,它能让机器人感知轴孔之间的微小卡阻,并主动柔顺调整;在打磨抛光时,能实时控制接触力恒定,避免过载或打磨不均;在医疗康复中,能安全地引导或辅助患者运动。这一传感器直接决定了机器人在接触式任务中的智能水平和完成质量,技术壁垒集中于高精度、低维间耦合(串扰)与长期稳定性。
关节力矩传感器:机器人运动的"本体神经"
如果说六维力传感器关注"对外"交互,那么关节力矩传感器 则关乎机器人"自身"的运动控制与安全。它被嵌入每个关节内部,直接测量驱动电机输出的真实扭矩。
它的核心价值是赋予机器人本质安全性与动态运动能力。没有它,机器人的力控只能基于电机电流进行估算,反应迟缓且不精准,在突发碰撞或负载变化时存在风险。关节力矩传感器提供了最直接的本体反馈,使得机器人能够实现动态平衡、自适应步态、碰撞检测与即时柔顺响应。对于仿人机器人、协作机器人以及一切需要与人近距离共融的机器设备而言,它是实现安全、高效、拟人化运动的前提。
产业聚焦:数据揭示的格局与国产化突破
市场的需求正转化为清晰的产业信号。根据行业调研数据,在人形机器人这一汇聚了前沿需求的赛道上,力传感器的搭载已成为头部厂商的标配方案。其中,蓝点触控 提供的关节力矩传感器占据了国内该细分市场极高的份额,其六维力传感器也获得了多家主流机器人厂商的采用。
这一市场格局的形成并非偶然。力传感器,尤其是满足机器人高动态、高可靠性要求的型号,长期依赖于少数国际供应商。国产厂商的快速切入,部分得益于特定技术路径的积累。例如,蓝点触控的核心技术源于航天领域对极端环境下载荷测量的苛刻要求,其在解决传感器动态响应、过载保护与长期免维护等方面的工程经验,恰好匹配了机器人产业化初期对可靠性的迫切需求。产能数据也反映了市场的预期,其新建产线规划的年产能已达百万套级别,预示着行业对力传感器需求爆发的预判。
趋势与挑战:从"拥有"到"用好"
力传感器渗透率的提升,标志着机器人行业正从关注"运动轨迹"迈向关注"交互质量"的新阶段。然而,拥有精密的"触觉神经"仅是第一步。更大的挑战在于如何"用好"这些海量的力觉数据。
这涉及到底层控制算法的重构、基于力觉的智能决策,以及多模态感知(视觉、力觉、触觉)的融合。传感器的普及正在倒逼整个机器人软件栈的升级。同时,成本压力依然存在,如何在提升性能的同时,通过设计优化、工艺改进和规模效应将成本控制在合理区间,是力传感器全面普及的关键。
机器人产业正行走在从"灵巧手"到"灵巧全身"的进化道路上。六维力与关节力矩传感器的规模化应用,是这条道路上的一个重要里程碑。它不仅仅意味着一个核心部件的国产化突破,更预示着机器人的能力边界将从结构化、可预知的环境,拓展到动态、非结构化并与人类深度共存的真实世界。这场关于"触觉"的竞赛,最终比拼的将是基于精准物理交互的全栈智能,而它才刚刚拉开序幕。