特征检测与描述概述
在计算机视觉中,**特征检测(Feature Detection)与特征描述(Feature Description)**是图像理解的核心技术之一,广泛应用于目标识别、图像拼接、SLAM、三维重建、跟踪等场景。
一个优秀的局部特征应具备以下特性:
- 可重复性(Repeatability):同一物体在不同图像中能检测到相同特征
- 尺度不变性(Scale Invariance)
- 旋转不变性(Rotation Invariance)
- 光照不敏感
- 计算效率高
经典特征算法包括:
- Harris
- SIFT
- SURF(Speeded-Up Robust Features)
- ORB、BRISK、AKAZE
其中 SURF 是 SIFT 的加速版本,在保证鲁棒性的同时,大幅提升了运算速度。
SURF 算法背景与特点
1. SURF 的提出
SURF(Speeded-Up Robust Features)由 Herbert Bay 等人于 2006 年提出,主要目标是:
在保持 SIFT 鲁棒性的前提下,提高计算速度,适合实时或大规模应用。
2. SURF 的核心特点
| 特性 | 说明 |
|---|---|
| 尺度不变 | 使用 Hessian 矩阵进行检测 |
| 旋转不变 | 基于 Haar 小波确定主方向 |
| 描述子 | 64 或 128 维向量 |
| 加速手段 | 积分图(Integral Image) |
| 鲁棒性 | 对噪声、模糊、亮度变化稳定 |
注意 :
SURF 属于 专利算法(非自由) ,在 OpenCV 中位于 xfeatures2d 模块,需使用 opencv-contrib。
SURF 特征检测原理
1. Hessian 矩阵检测关键点
SURF 使用 Hessian 矩阵来寻找图像中的兴趣点:
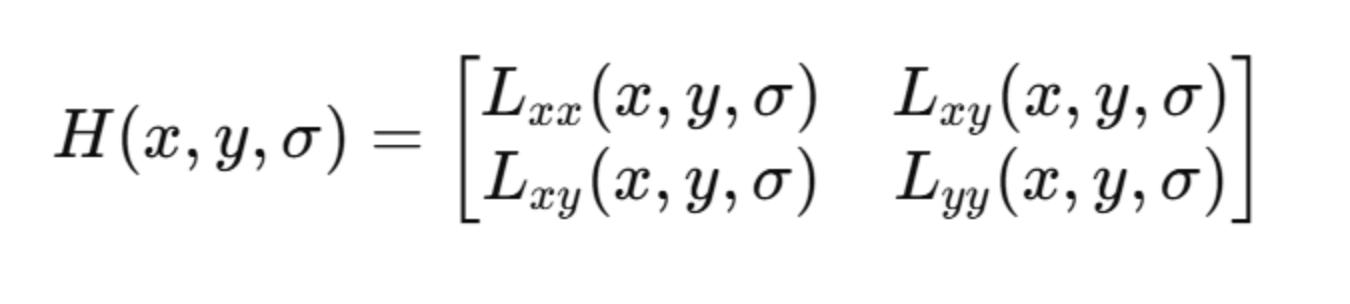
其中:
- Lxx,Lyy,Lxy:二阶高斯导数
- 行列式用于判断局部极值:

SURF 使用 盒式滤波(Box Filter)+ 积分图 来近似高斯导数,大幅加快计算速度。
2. 尺度空间构建(Scale Space)
与 SIFT 使用图像金字塔不同:
- SURF 在原图上直接改变滤波器大小
- 避免多次图像缩放
- 更高效
3. 主方向分配(Orientation Assignment)
为了实现旋转不变性:
- 在关键点邻域内计算 Haar 小波响应
- 在 60° 滑动窗口内统计方向向量
- 最大响应方向作为主方向
4. 特征描述子构建
SURF 描述子构建流程:
- 以关键点为中心,旋转到主方向
- 划分为 4×4 子区域
- 每个区域计算:
- ∑dx
- ∑dy
- ∑|dx|
- ∑|dy|
- 拼接得到 64 维向量
扩展版(Extended)可得到 128 维描述子。
OpenCV 中 SURF 的使用条件
安装 OpenCV-Contrib
SURF 位于 xfeatures2d,需安装:
pip install opencv-contrib-python验证:
python
import cv2
print(hasattr(cv2, "xfeatures2d"))示例
从 OpenCV 4.7+ 开始,官方发布的 opencv-contrib-python 已彻底禁用 SURF(非自由 / 专利算法),此处仅作为示例展示。
python
import cv2
import numpy as np
def surf_feature_detect(image_path):
# 1. 读取图像(灰度图)
img_gray = cv2.imread(image_path, cv2.IMREAD_GRAYSCALE)
if img_gray is None:
raise ValueError("图像读取失败,请检查路径")
# 2. 创建 SURF 对象
surf = cv2.xfeatures2d.SURF_create(
hessianThreshold=400, # Hessian 阈值
nOctaves=4, # 金字塔 octave 数
nOctaveLayers=3, # 每个 octave 的层数
extended=False, # False=64维,True=128维
upright=False # False=旋转不变,True=忽略方向
)
# 3. 检测关键点 + 计算描述子
keypoints, descriptors = surf.detectAndCompute(img_gray, None)
print(f"检测到的特征点数量: {len(keypoints)}")
if descriptors is not None:
print(f"描述子维度: {descriptors.shape}")
else:
print("未检测到描述子")
# 4. 绘制关键点(大小+方向)
img_keypoints = cv2.drawKeypoints(
img_gray,
keypoints,
None,
flags=cv2.DRAW_MATCHES_FLAGS_DRAW_RICH_KEYPOINTS
)
# 5. 显示结果
cv2.imshow("Original Image", img_gray)
cv2.imshow("SURF Keypoints", img_keypoints)
cv2.waitKey(0)
cv2.destroyAllWindows()
if __name__ == "__main__":
surf_feature_detect("test.jpg")SURF 与其他特征算法对比
| 算法 | 速度 | 鲁棒性 | 专利 |
|---|---|---|---|
| SIFT | 慢 | 极高 | 有 |
| SURF | 中快 | 高 | 有 |
| ORB | 快 | 中 | 无 |
| AKAZE | 中 | 高 | 无 |
总结
SURF 是一种 在速度与鲁棒性之间取得良好平衡的经典特征算法 ,通过 Hessian 矩阵、积分图与 Haar 小波,实现了高效的特征检测与描述。虽然在现代项目中逐渐被 ORB、AKAZE 等自由算法取代,但 SURF 仍然是理解特征点算法的重要里程碑。