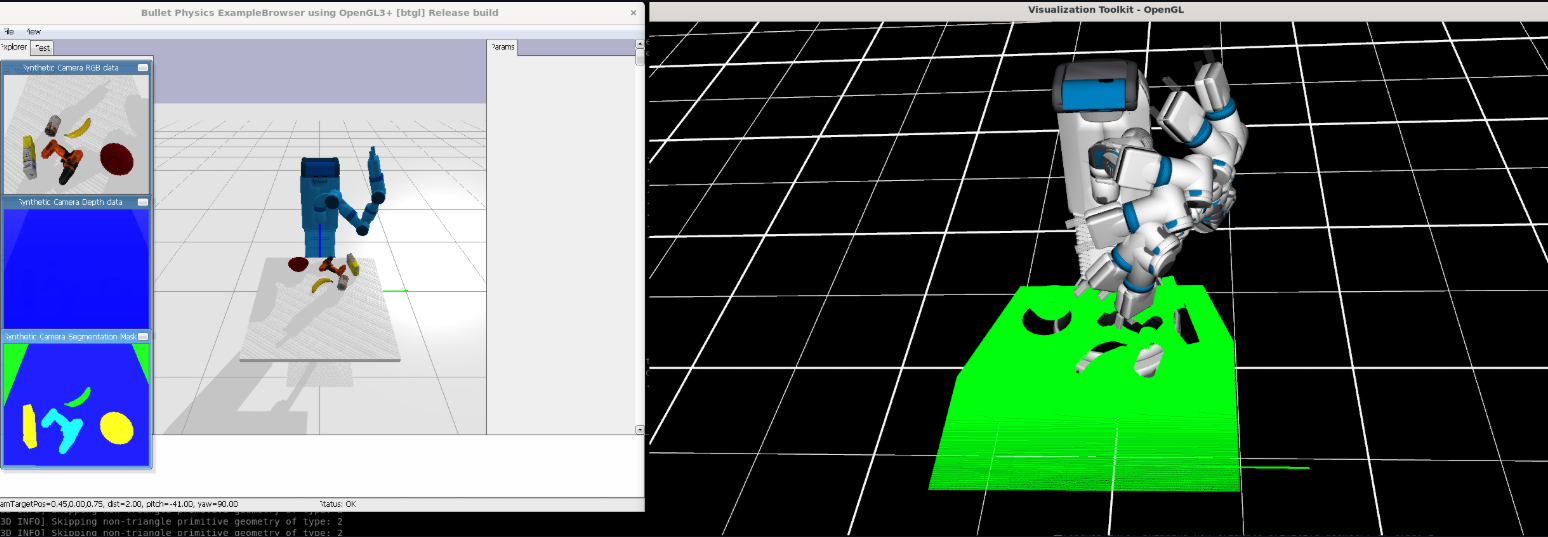
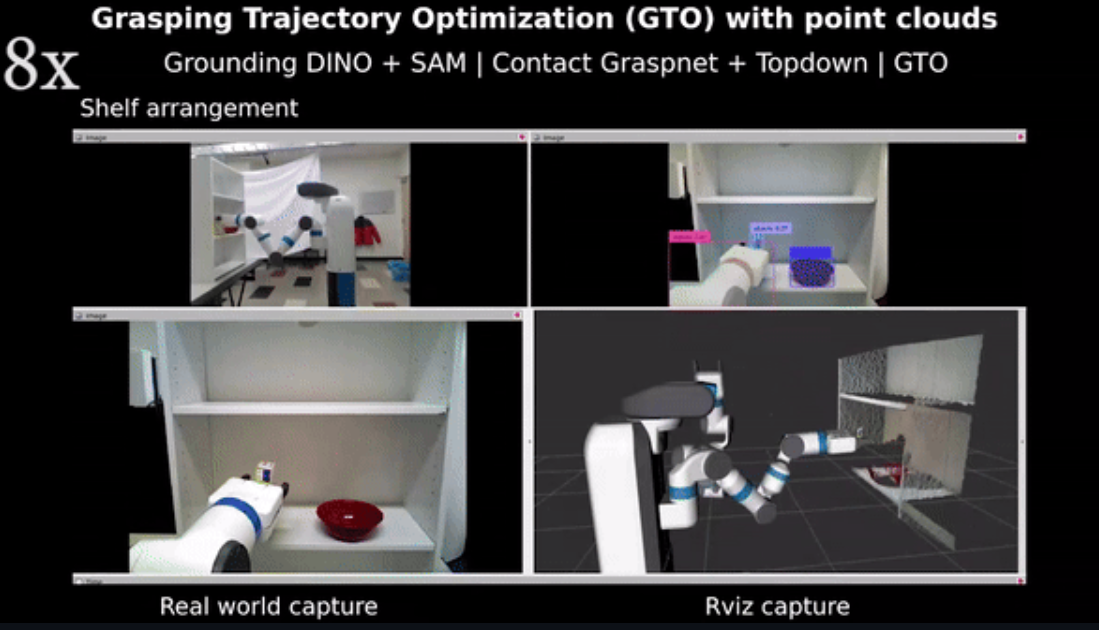
复现的抓取项目链接:https://github.com/IRVLUTD/GraspTrajOpt/tree/mobile?tab=readme-ov-file
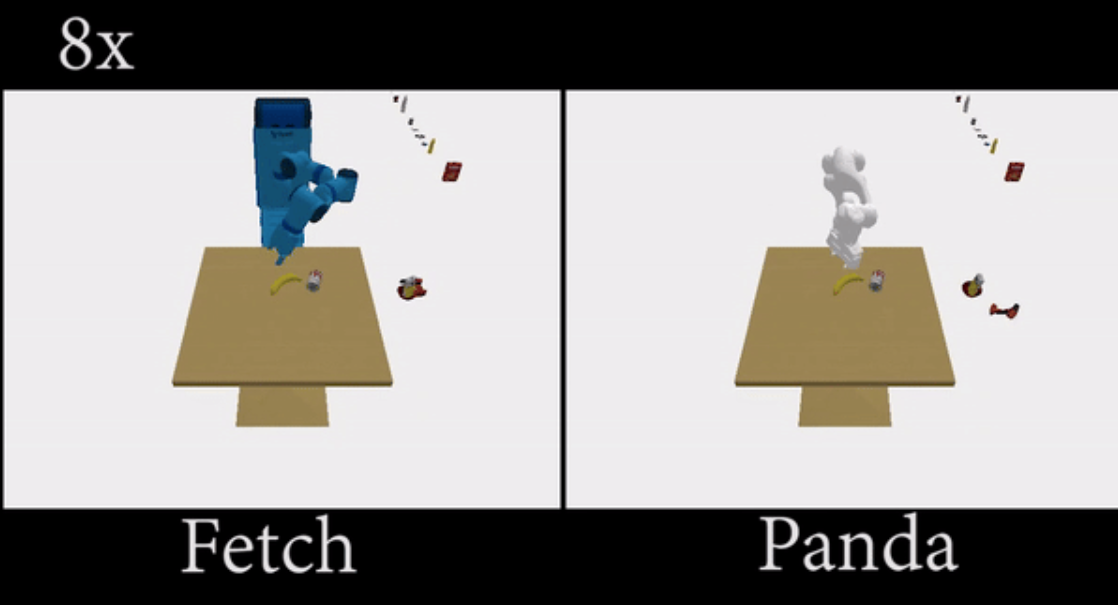
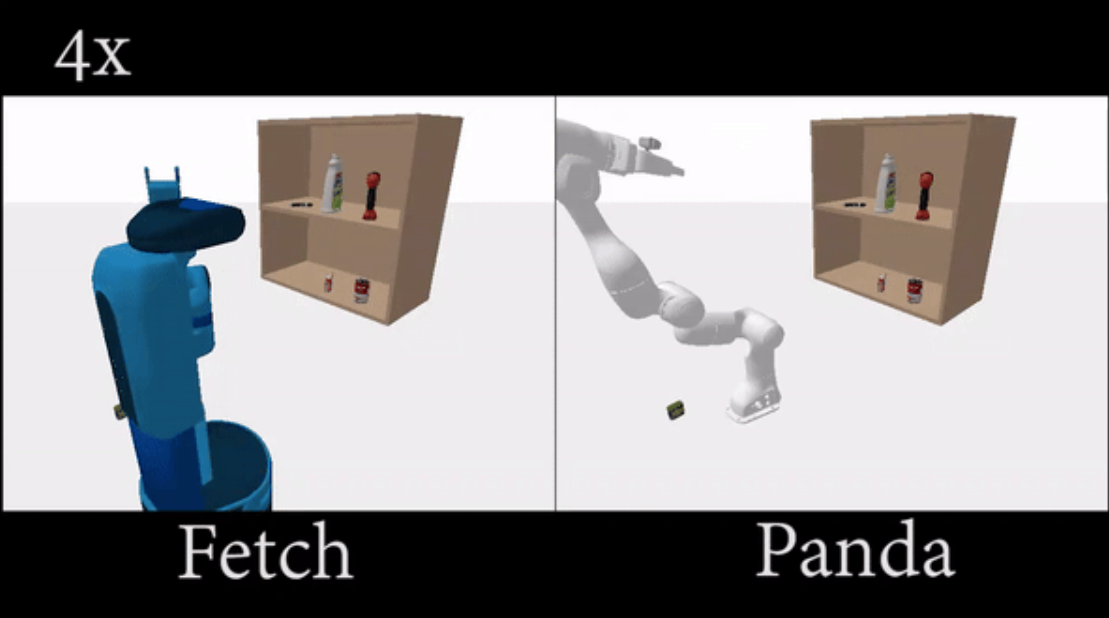
在复现的时候发现需要的SceneReplica 数据下载网址点不开,后来发现这个数据集就是有个论文提供的数据集,这个论文的项目网址如下:"SceneReplica: Benchmarking Real-World Robot Manipulation by Creating Replicable Scenes"
所以你可以直接访问他的数据集网址SceneReplica数据集下载github
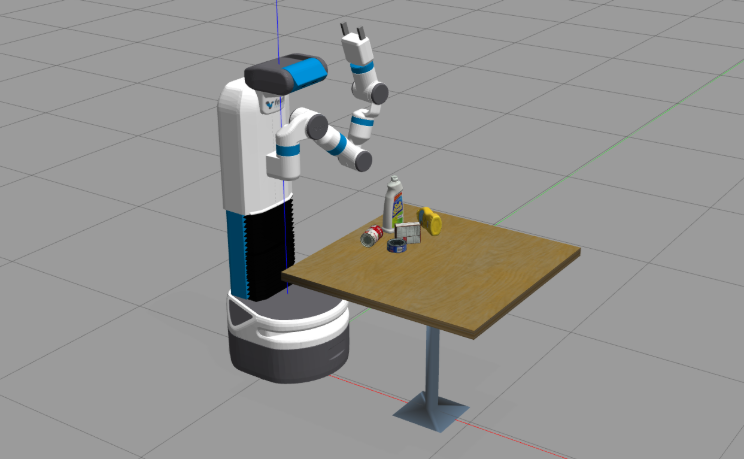
SceneReplica是一个完整的 机器人抓取基准测试框架------ 桌面物体模型是其核心数据之一,但仓库还包含场景配置、抓取算法基准代码、仿真 / 真实世界部署工具等关键内容,用于统一测试和对比不同抓取算法的性能。
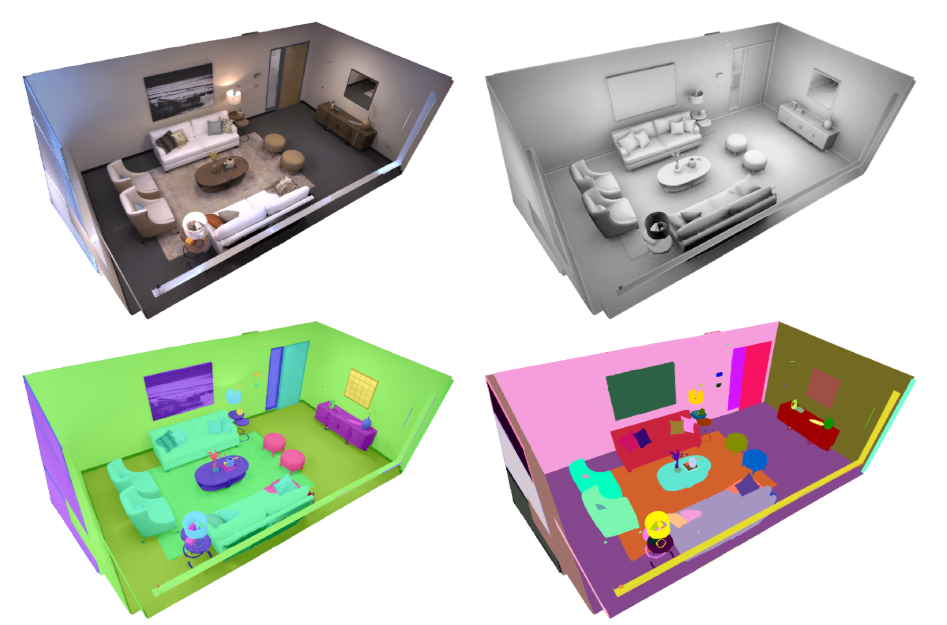
这里还有另外一个数据集,场景是室内更全面的场景
Replica数据集下载的镜像网址![]() https://gitcode.com/gh_mirrors/re/Replica-Dataset/?utm_source=gitcode_aigc_v1_t0&index=top&type=card&uuid_tt_dd=10_10074194580-1753457008273-377642&from_id=155702722&from_link=53830a3cd3d80230538a132c74724d12这里参考了教程Replica数据集完整教程:从入门到3D场景渲染精通
https://gitcode.com/gh_mirrors/re/Replica-Dataset/?utm_source=gitcode_aigc_v1_t0&index=top&type=card&uuid_tt_dd=10_10074194580-1753457008273-377642&from_id=155702722&from_link=53830a3cd3d80230538a132c74724d12这里参考了教程Replica数据集完整教程:从入门到3D场景渲染精通
其实Replica就是提供了一些场景建模数据