

"中国核心·驱动未来"
12月19日 ,深圳市机器人协会年度大会暨2025深圳机器人年度评选颁奖典礼 在深圳国际会展中心洲际酒店顺利召开。本次会议以"凝聚共识、汇聚资源、突破瓶颈"为方向,汇集了院士学者、行业领军企业代表及前沿创新团队,共同分析产业演进方向、研讨关键技术路线,旨在携手打造自主可控的人形机器人产业新生态。

"自主可控·技术赋能"
在本次年度评选颁奖典礼中,正运动技术凭借『通用柔性机械手视觉供料解决方案 』荣获『机器人应用典型案例奖』。正运动始终坚持以自主可控的运动控制技术为核心,紧密围绕市场需求与客户反馈,持续推动产品创新与系统方案优化。公司致力于为客户提供高度集成的一体化解决方案,有效帮助降低生产成本、减轻对专业技术人员依赖、显著提升工艺产能,以自主技术赋能智能制造升级。
机器人应用典型案例奖
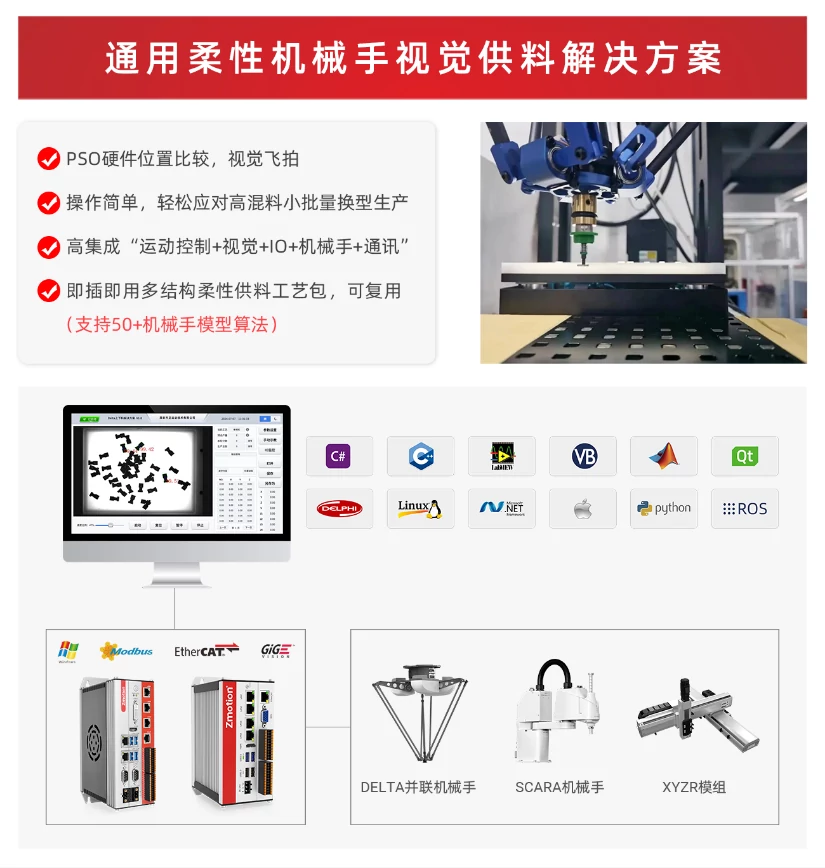
通用柔性机械手视觉供料解决方案
------机器人应用典型案例奖获奖方案
正运动技术研发的通用柔性机械手视觉供料解决方案,基于VPLC系列机器视觉运动控制一体机 开发。该方案有效突破传统供料方式在柔性适配与效率上的局限,支持快速物料切换与灵活工艺配置,显著提升了系统的兼容性与整体生产效率。

01 应用优势
**● 技术门槛低:**拖拽式中文组态视觉,应用工程师经过简单培训可轻松上手。
● 项目开发周期快:成熟的视觉机械手柔振工艺方案,减少用户开发时间成本。
● 软硬件集成性强:集成EtherCAT总线、脉冲混合控制,机器视觉、运动控制、集软硬于一体易于设备调试与排除问题。
● 降低企业用人成本:一人即可调试设备的运动控制、视觉、IO逻辑控制等,解决工程人员流失、用人成本高等问题。
● 柔性化生产:可保存多个物料的视觉和运控配置程序,一键完成工艺包切换。可灵活处理不同尺寸和形状的工件,无需频繁更换硬件,降低产线停机时间。
02 高集成机器视觉运动控制一体机VPLC7系列
x86平台实时Windows机器视觉EtherCAT运动控制器,集成视觉、运动控制、IO控制以及监控等一体化控制。

● 4-64轴运动控制可选(脉冲+EtherCAT总线),EtherCAT最小通讯周期250us。
● 内置强实时运动控制内核MotionRT750,支持第三方视觉软件。
● 板载20路通用输入(其中VPLC711的10路和VPLC712的8路为高速输入),20路高速输出。
● 基于x86架构的EtherCAT总线视觉运动控制器,支持脱机运行,内置丰富的视觉和运动控制功能,大幅简化配置流程。
● 支持EtherCAT冗余功能,解决单点故障停机,自动诊断并持续运行,增强系统可靠性,简化维护工作。
● 提供一体化开放式IPC形态的实时软控制器/软PLC集成的视觉+运动控制解决方案。
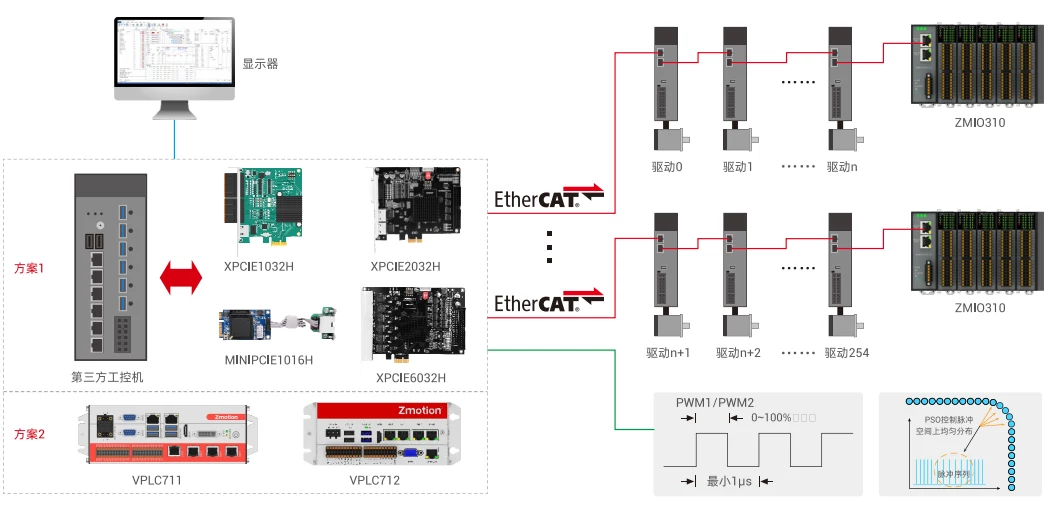
运动控制产品预览
超高实时PCIe EtherCAT运动控制卡
● EtherCAT总线4-254轴可选;
● EtherCAT同步周期可快至62.5us;
● EtherCAT总线冗余,断线自动切换,降低停机风险;
● 运动规划PT/PVT模式,实时计算路径;
● 动态变速与位移,实现软着陆精准力控;
● SS曲线:确保运动平稳,消除高速抖动;
● 搭载强实时内核MotionRT750;
● 可1-6路独立EtherCAT主站,各通道EtherCAT同步周期可自由配置(125us-1ms);
● 高速IO输入输出,支持硬件比较输出PSO、PWM、硬件锁存等多项实时控制功能。
全自主实时运动控制内核MotionRT750
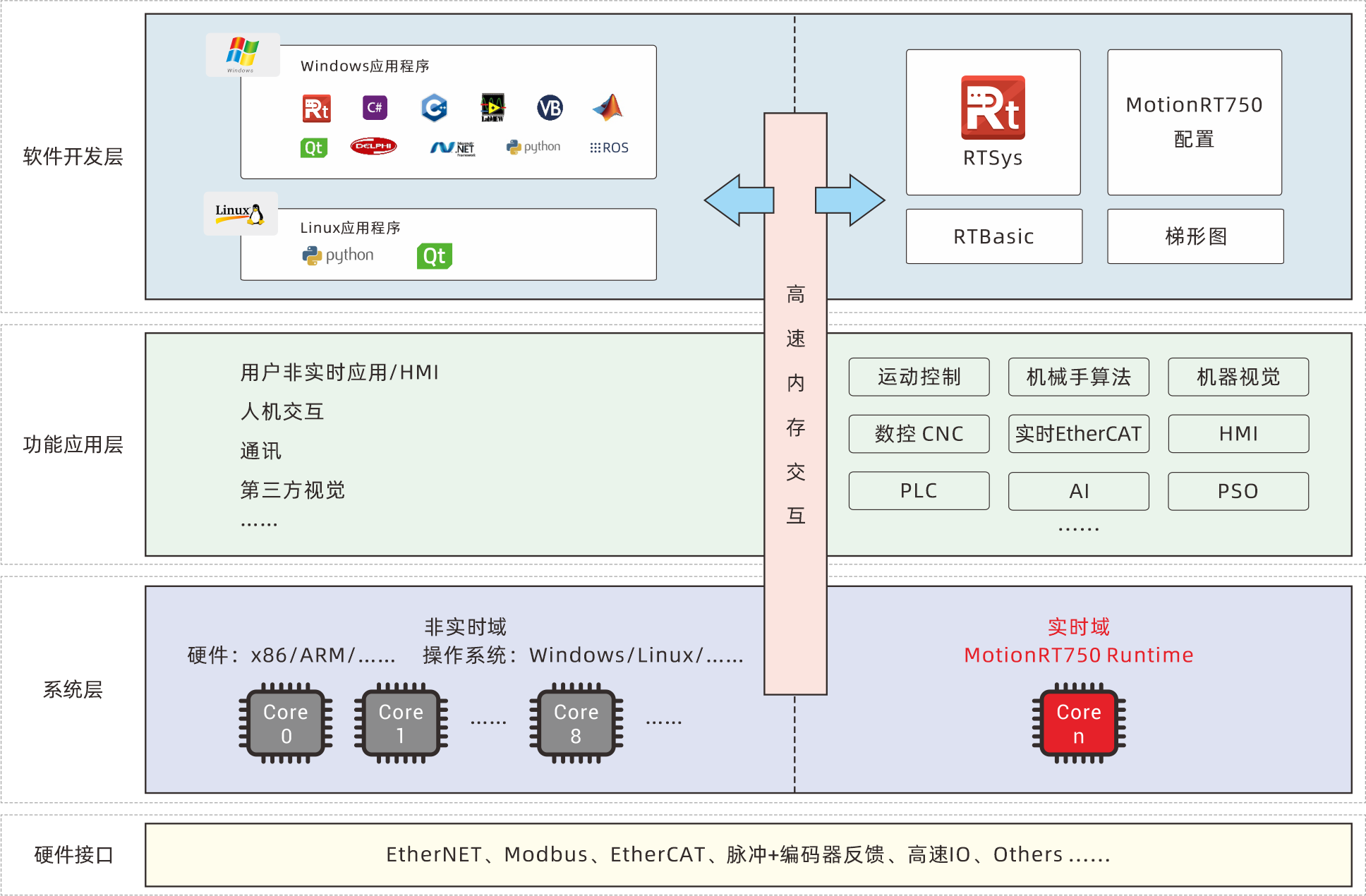
支持多达 254轴的高精度协同运动控制,控制周期可低至125μs,并通过微秒级指令交互实现10-100倍的速度提升,显著提升设备性能与整体效能。
系统采用冗余架构保障稳定运行,即使上位机发生故障,控制内核仍可持续工作并确保急停安全功能有效,从而杜绝非计划停产,为工业安全生产提供了坚实保障。
运动控制解决方案应用预览




愿景
此次获奖对我们而言,是一个新开始。正运动技术将持续专注于自主可控的运动控制技术研发与突破,并加强对高速高精度、柔性化等核心工业应用领域关键技术应用指标的攻坚力度。面向智能制造的时代需求,我们致力于通过创新帮助客户实现降本增效,为客户提供扎实的技术支持,共同推动工业控制走向更智能、更可靠、更高效的未来,创造持久而真实的价值。