一、什么是PnP
PnP = 已知 n 个 3D 点 和 它们在图像中的 2D 投影,求相机(或物体)的 3D 位姿。
用"点对点"的几何约束,把二维图像还原成三维位姿。
P n P 分别表示什么意思
 理解
理解
-
📍 一块标定板 / 工件
- 上面点的 3D 坐标已知
-
📷 一张图像
- 这些点的 2D 像素坐标已知
👉 PnP 要算的是:
-
这个物体 在空间中怎么摆的
-
或者相机 在什么位置、什么角度
也就是:
位置 + 姿态 = 6D Pose
二、数学推导
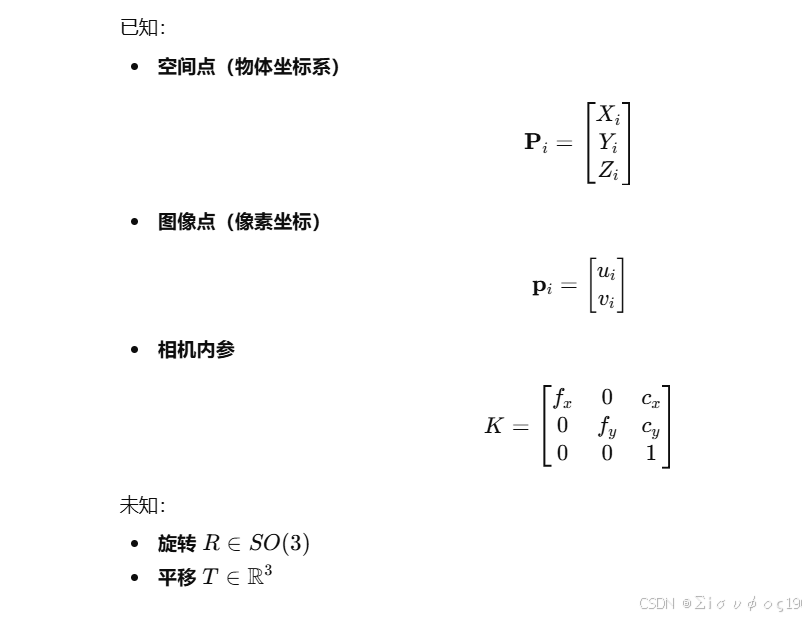
PnP 的数学问题定义(起点)
成像模型(PnP 的物理基础)
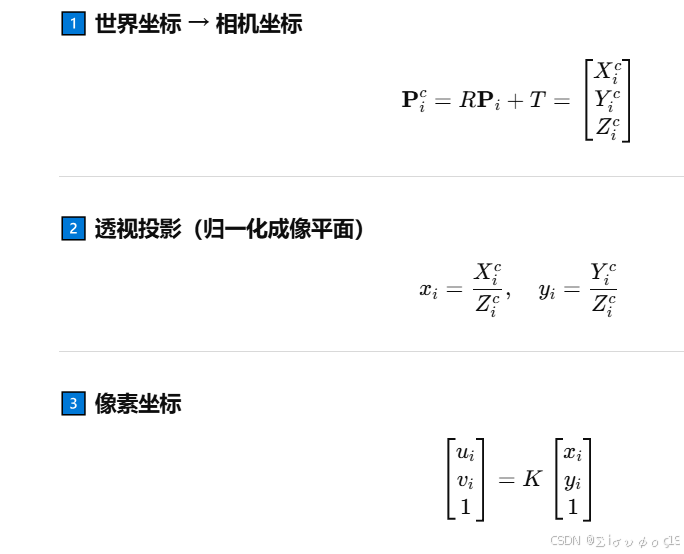
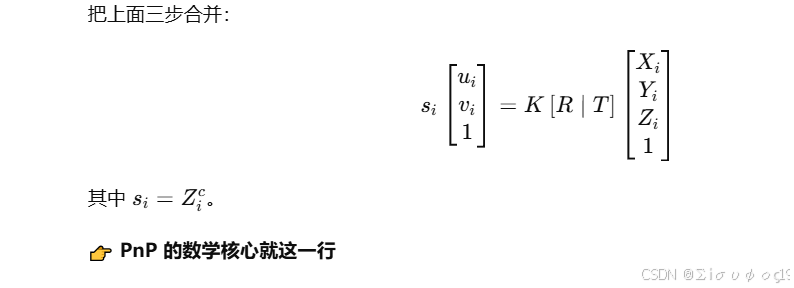
PnP 的核心等式(齐次形式)
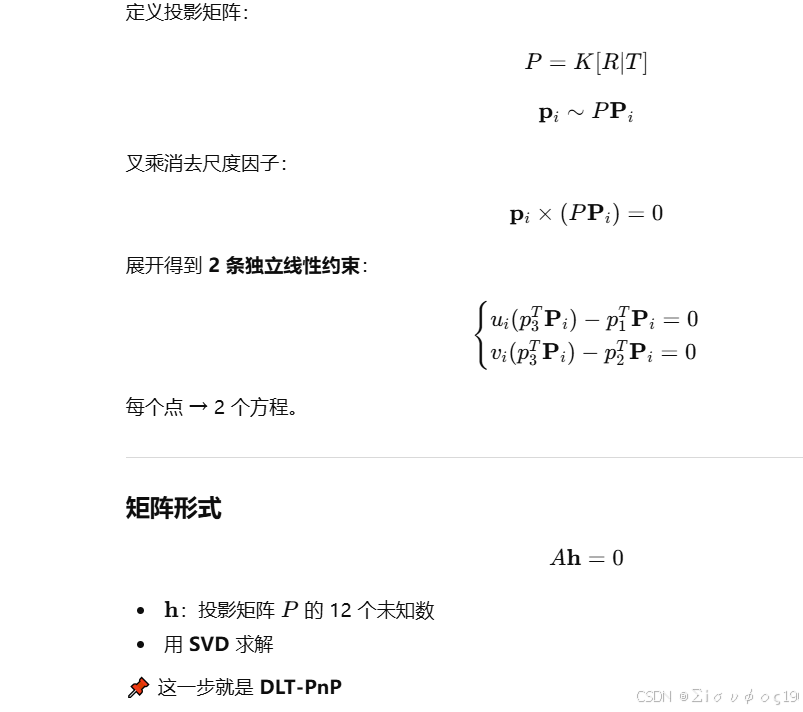
线性化(DLT 推导)
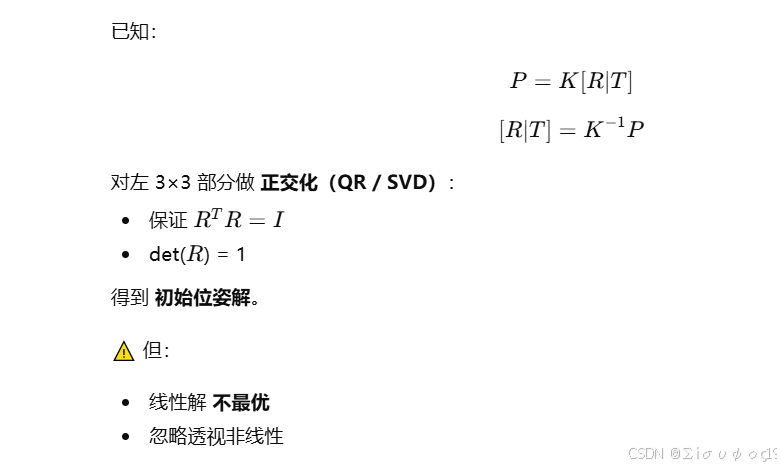
从投影矩阵分解出 R 和 T
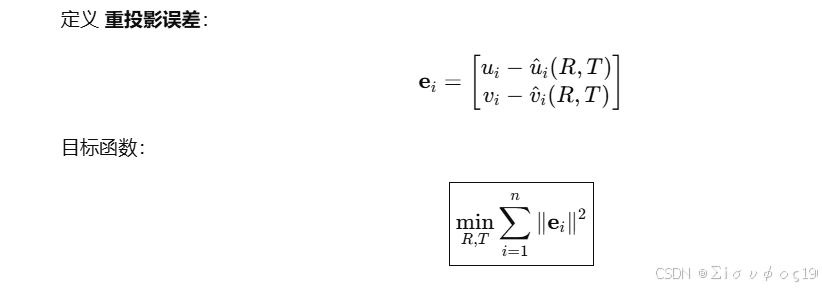
真正的 PnP:非线性最小二乘
旋转的数学参数化(关键点)
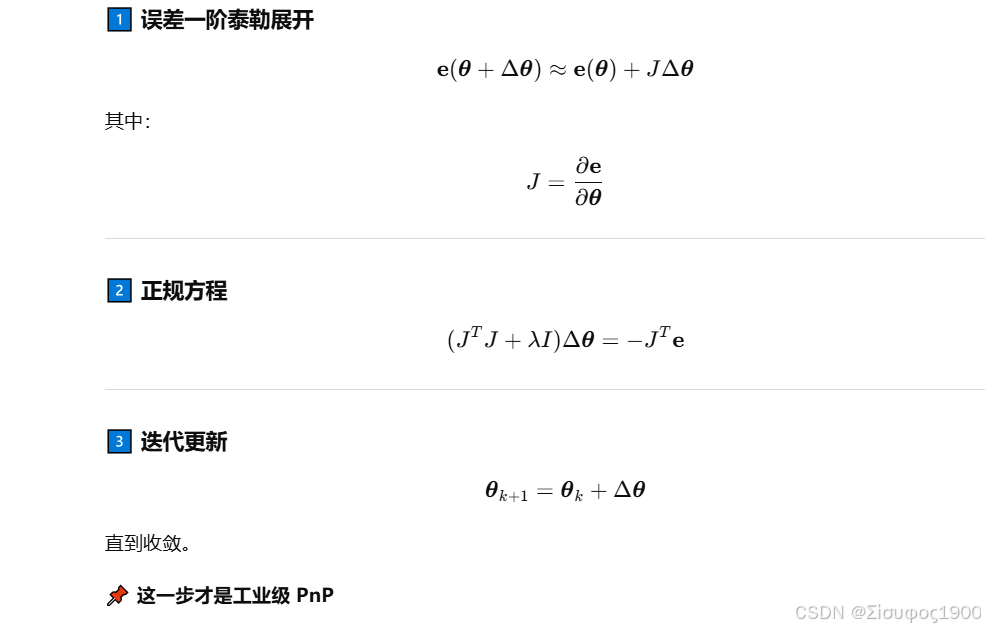
LM 优化推导(核心计算)
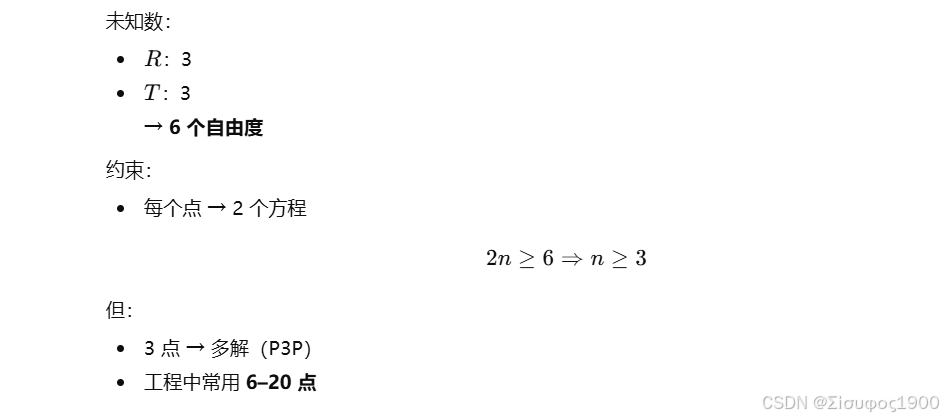
为什么至少需要 3 个点
三、P3P
简介
P3P是PnP的最小情形
P3P = PnP 在 n=3 时的解析几何解
PnP = 以 P3P 为初值的非线性最小二乘
本质:
P3P 的本质是:
利用三条已知射线夹角和三边长度,通过余弦定理消元,
得到一个四次多项式,其实根对应相机到三点的几何构型
计算流程
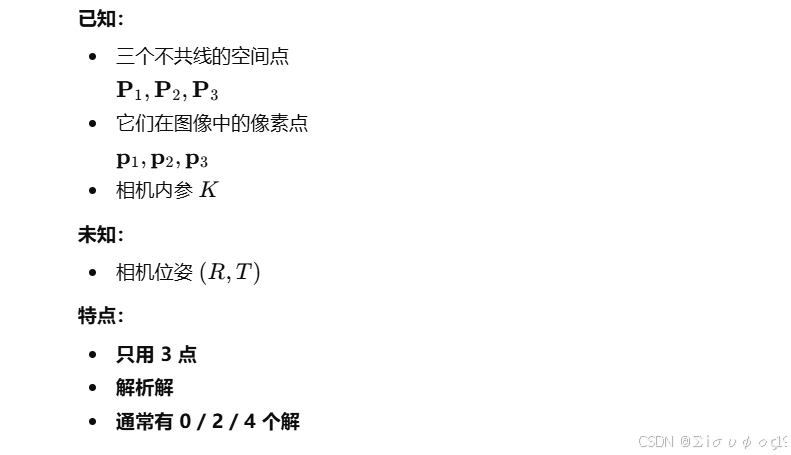
P3P 问题定义(最小情形)
关键几何转化(把问题变成三角形)
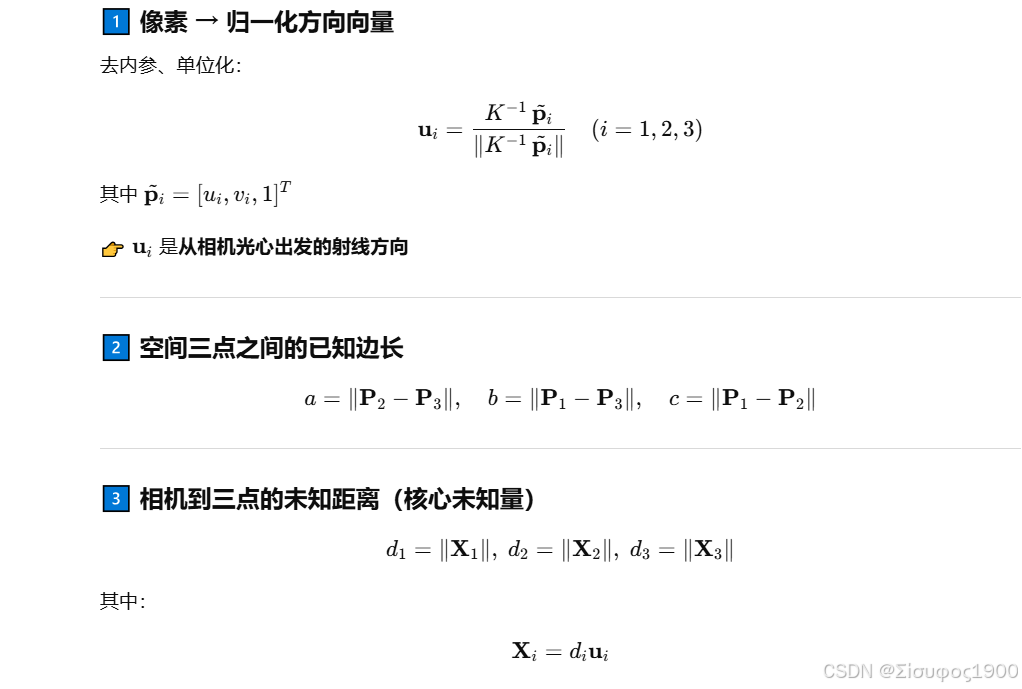
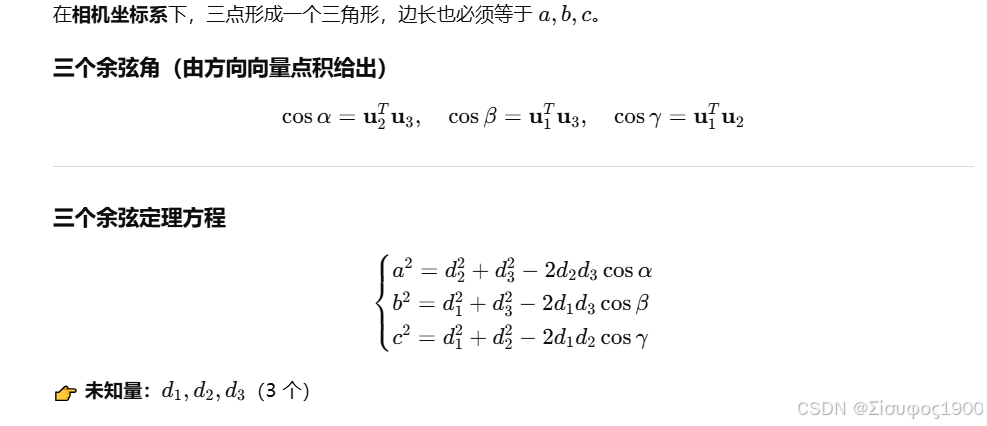
用余弦定理建立方程(核心)
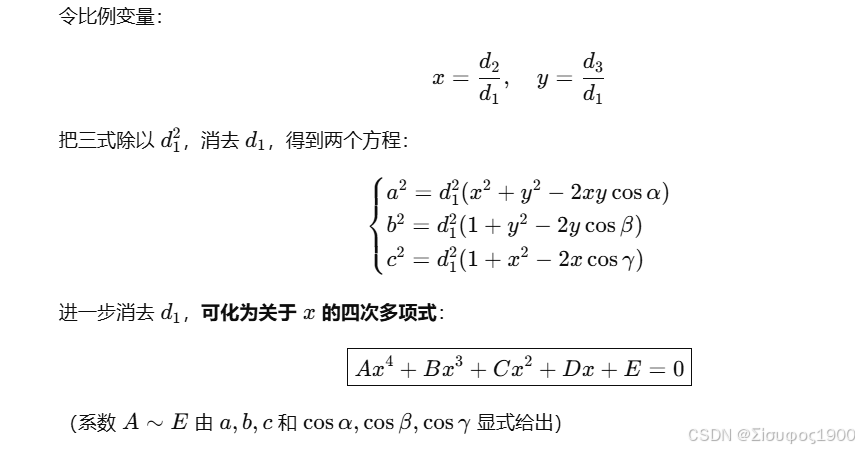
消元 → 四次多项式(解析解的关键)
求解与物理筛选
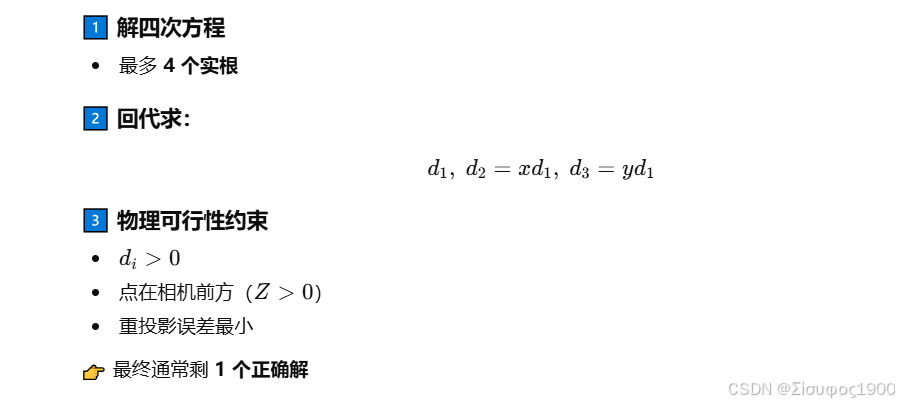
由三点恢复位姿 R,T
为什么 P3P 会有多解?
几何原因:
-
相机与三点构成的空间四面体
-
关于某些平面对称 → 镜像解
-
三点几乎共线 / 共面 → 退化
📌 所以工程中:
-
P3P 只做初值
-
后面一定接 LM 优化(PnP)
MATLAB:P3P + LM(完整 PnP)实现
整体结构
输入:N ≥ 4 个 3D--2D 对应点 + 相机内参
↓
任选 3 点 → P3P
↓
得到 1~4 个 (R,T) 初值
↓
LM 优化(最小化重投影误差)
↓
输出最优 (R,T)
主程序(P3P_main.m)
cs
clc; clear;
%% ========= 1. 数据 =========
% --- 世界坐标点 (>=4) ---
Pw = [
0 0 0;
0.1 0 0;
0 0.1 0;
0.1 0.1 0
];
% --- 像素点 ---
uv = [
520 410;
610 415;
515 500;
605 505
];
% --- 相机内参 ---
fx = 800; fy = 800;
cx = 640; cy = 360;
K = [fx 0 cx;
0 fy cy;
0 0 1];
%% ========= 2. 用前三点做 P3P =========
[R0, T0] = p3p_initial(Pw(1:3,:), uv(1:3,:), K);
%% ========= 3. LM 优化 =========
x0 = pose_to_vector(R0, T0);
opts = optimoptions('lsqnonlin',...
'Algorithm','levenberg-marquardt',...
'Display','iter',...
'FunctionTolerance',1e-10);
x_opt = lsqnonlin(@(x) reproj_residual(x, Pw, uv, K), ...
x0, [], [], opts);
%% ========= 4. 输出 =========
[R, T] = vector_to_pose(x_opt);
disp('Optimized Rotation R =');
disp(R);
disp('Optimized Translation T =');
disp(T');四次多项式构造函数(核心)
cs
function coeffs = p3p_polynomial(a,b,c,ca,cb,cg)
% 返回 x 的四次多项式系数 [A B C D E]
A = (a^2 - b^2)^2 - 4*a^2*b^2*cg^2;
B = 4*(a^2 - b^2)*(b^2*(1-ca*cb) - a^2*(1-ca^2));
C = 2*( ...
(a^2 - b^2)^2 ...
+ 2*(a^2 + b^2)*(a^2*ca^2 + b^2*cb^2 - a^2 - b^2) ...
+ 4*a^2*b^2*ca*cb*cg ...
);
D = 4*(b^2*(1-ca*cb) - a^2*(1-ca^2))*(a^2 - b^2);
E = (a^2 - b^2)^2 - 4*a^2*b^2*ca^2;
coeffs = [A B C D E];
endP3P 初值函数
cs
function [bestR, bestT] = p3p_initial(Pw, uv, K)
% 像素 → 单位方向
u = zeros(3,3);
for i = 1:3
x = K \ [uv(i,:) 1]';
u(i,:) = x'/norm(x);
end
a = norm(Pw(2,:) - Pw(3,:));
b = norm(Pw(1,:) - Pw(3,:));
c = norm(Pw(1,:) - Pw(2,:));
ca = dot(u(2,:),u(3,:));
cb = dot(u(1,:),u(3,:));
cg = dot(u(1,:),u(2,:));
coeffs = p3p_polynomial(a,b,c,ca,cb,cg);
xs = roots(coeffs);
bestErr = inf;
for i = 1:length(xs)
x = xs(i);
if ~isreal(x) || x<=0, continue; end
y = (b^2 - a^2*x^2 + 2*a^2*x*ca - a^2) / ...
(2*(b^2*cb - a^2*x*ca));
if y<=0, continue; end
d1 = sqrt(c^2 / (1 + x^2 - 2*x*cg));
d2 = x*d1;
d3 = y*d1;
Pc = [
d1*u(1,:);
d2*u(2,:);
d3*u(3,:);
];
[R,T] = rigid_transform_3D(Pw, Pc);
err = reprojection_error(Pw, uv, R, T, K);
if err < bestErr
bestErr = err;
bestR = R;
bestT = T;
end
end
endLM 优化的数学核心
位姿参数化(Rodrigues)
cs
function x = pose_to_vector(R, T)
r = rotm2axang(R);
x = [r(1:3)*r(4); T];
end
cs
function [R,T] = vector_to_pose(x)
theta = norm(x(1:3));
if theta < 1e-12
R = eye(3);
else
k = x(1:3)/theta;
R = axang2rotm([k' theta]);
end
T = x(4:6);
endLM 残差(重投影误差)
cs
function r = reproj_residual(x, Pw, uv, K)
[R,T] = vector_to_pose(x);
N = size(Pw,1);
r = zeros(2*N,1);
for i = 1:N
Pc = R*Pw(i,:)' + T;
p = K*(Pc/Pc(3));
r(2*i-1:2*i) = p(1:2) - uv(i,:)';
end
end
四、常见 PnP 算法名字
-
P3P(3 点解)
-
EPnP(高效)
-
DLT
-
LM-PnP(优化)
-
OpenCV:
solvePnP -
HALCON:
find_marks_and_pose