一、SPWM 的低效问题
效率详细讨论与推导请看我之前写的:
SPWM 与 SVPWM (零序分量法实现) 电压利用率简谈_svpwm电压利用率-CSDN博客
调制效率问题非本篇主要内容,在这里忽略细节,直接抛出结论。
1.1 电压利用率定义
电压利用率 = 逆变器能输出的最大相电压 (峰值,非峰峰值) 除母线电压
1.2 SPWM电压利用率
下图是我们使用 SPWM 的相电压:
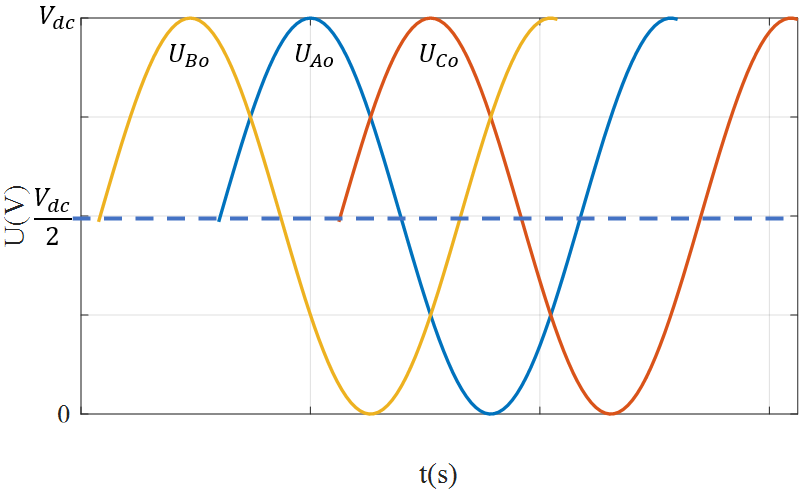
可见,其相电压利用率为 50%,也就是 0.5,我们可见每一项的峰值只有母线电压的一半。
我们可知:
= 线电压
所以,SPWM 的线电压利用率就是 0.5 乘 ,也就是 86.6%。
1.3 SVPWM 电压利用率
SVPWM 通过将相电压改成马鞍波形式,使其相电压利用率达到 。
这样,我们再将其转化为线电压,就得到了 的电压利用率了。
下图中两个调制波形的效率比相同,调制比均为 86.6%。
 标题
标题 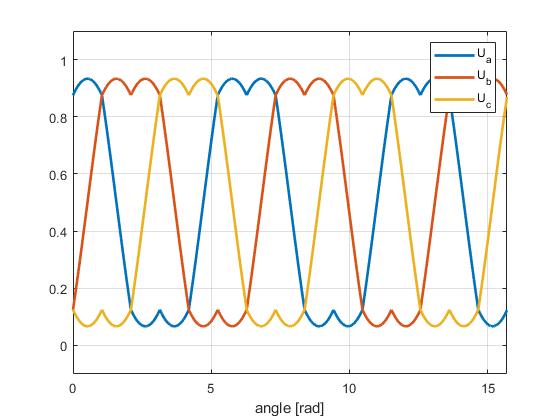 标题
标题
我们根据上图来看,母线电压是 1V,这样相电压最大为 1V 最小为 0V。我们保证波形不削顶的情况下,SPWM 的线电压最大极限也只有 1V * 86.6% = 0.866 V。
但是 SVPWM 的马鞍波在调制比 86.6% 的情况下,顶部没有触及到 1V,同时底部也没有触及到 0V,其还有13.4%的调制余量。所以在波形上我们可以看到,为什么 SVPWM 的电压利用率能达到 100%。
二、SVPWM 扇区判断法实现 (dq 轴转化 SVPWM)
2.1 六步换相控制
六步换相控制电机原理如下:

其中我们通过 A-B、A-C、B-C、B-A、C-A、C-B 通电六种组合,可以得到转子的六个角度:
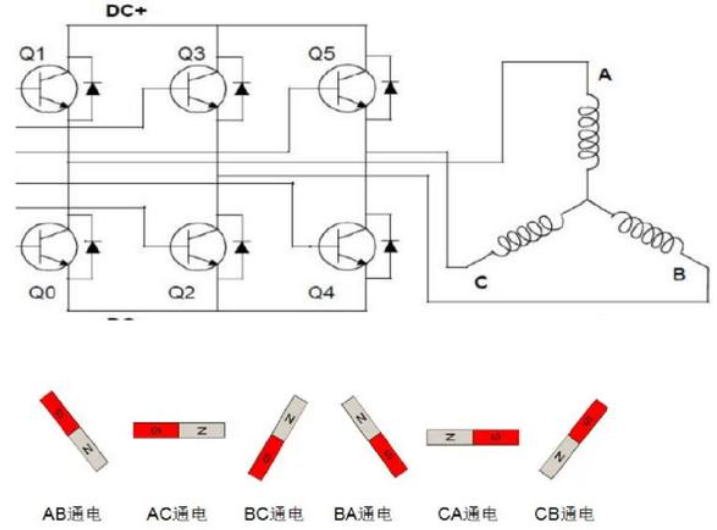
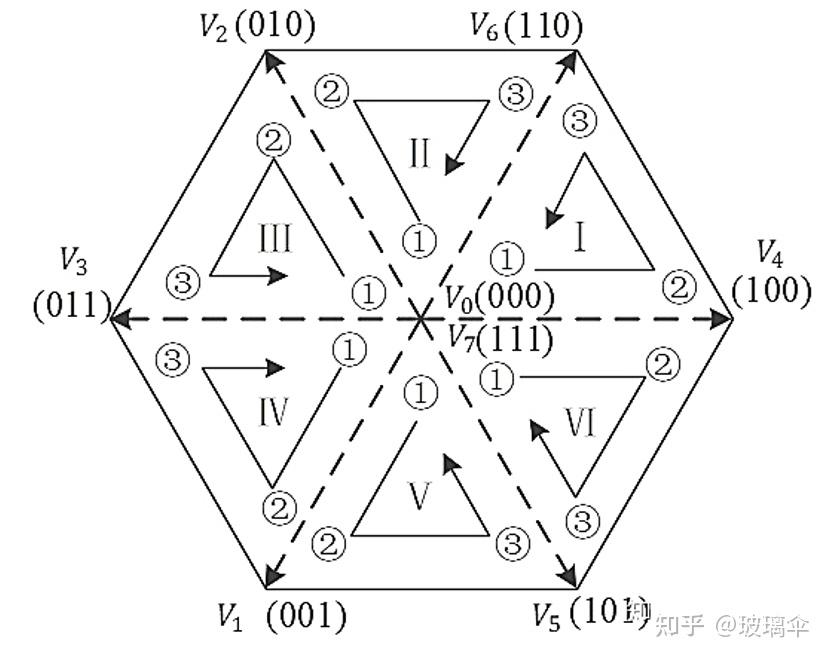
将电机转子的六个角度分为 V1 ~ V6 六个角度,也可以理解为六个基本向量,如下图:
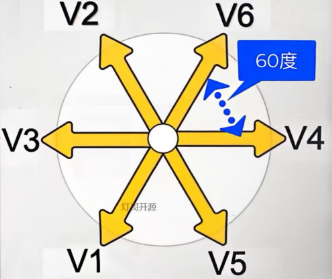
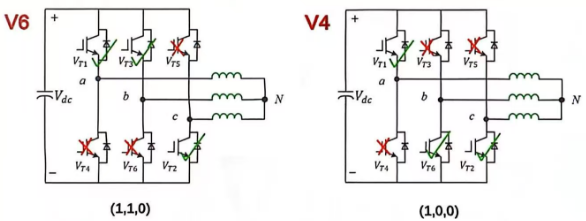
我们将 V6 定义为 110,也就是上管 T1 和 T3 打开,下管 T2 打开;
我们将 V4 定义为 100,也就是上管 T1 打开,下管 T6 和 T2 打开;
如下图所示:
2.2 电压关系分析
我们应该根据 Y 形连接中的中点电压作为 0V 电压参考,因为转子所受的安培力也是为这个线圈节点的计算。
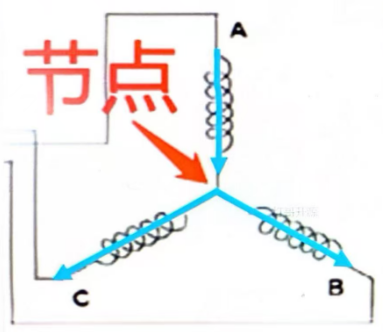
我根据电路仿真我们可知 Y 形连接的电压关系,在下模型中,我们将线圈等同于 1 欧电阻。
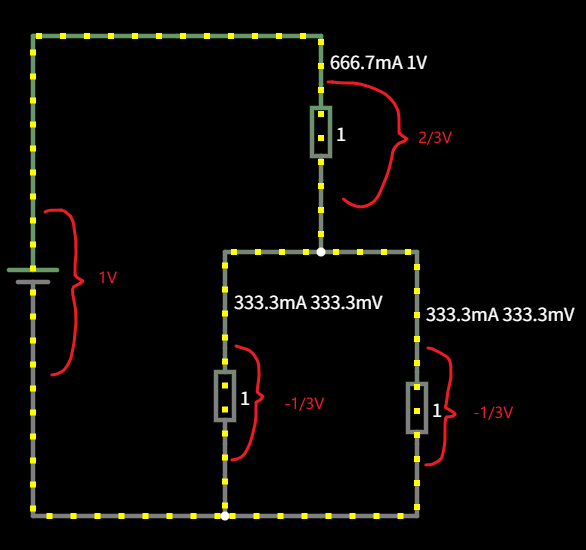
根据基尔霍夫电流定律可知:
同理,根据基尔霍夫电压定律可知:
在上面的模型中,A 相为 ,则
,
。
2.3 SVPWM 数学推导
当然,我们的控制不能满足于六个角度,所以我们单独分析 V6 和 V4 两个基本向量夹角,以求得更细分的角度控制。
如下图所示,这是 V6 和 V4 区间的细分示意: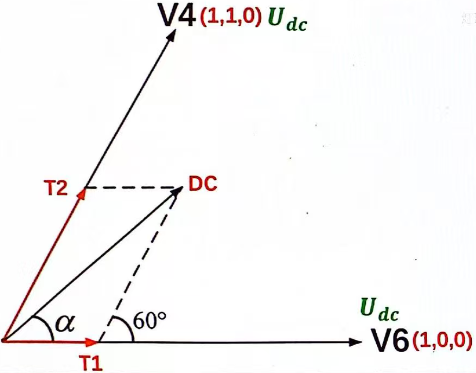
其 DC 可以看作目标的 Uq 电压,也就 q 轴磁场的强度;T 是单位周期,周期中 T = 1。
根据正弦定理 (在任意一个平面三角形中,各边和它所对角的正弦比的比相等),我们可以得到:
如果我们要生成一个 DC 的矢量,下面两个公式可以得到 T1 和 T2 的长度。
我们可知,Uq、Ud 的矢量的模长度和 Uα 和 Uβ 矢量的和的模长度是相同的:
但是根据等幅克拉克变换来说,A、B、C 三项的电压却要乘 2/3。
所以,最终的变换关系如下:
因为我们是 id = 0 控制,综合化简后得:
2.4 推广至六个向量
对角度取整,确定指定角度在哪个扇区:
- k = 扇区
确定扇区内的目标角度:
至此,我们的 T1 和 T2 推广至六个扇区:
最后,我们需要计算出 T0 时间:
对于 V4 和 V6 向量之间,我们的开关顺序是这样的:
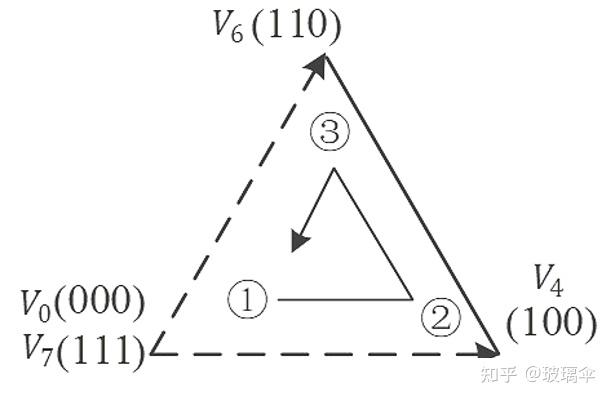
以上是讨论一个扇区的,所有扇区的开关切换顺序可以由下图来表示:
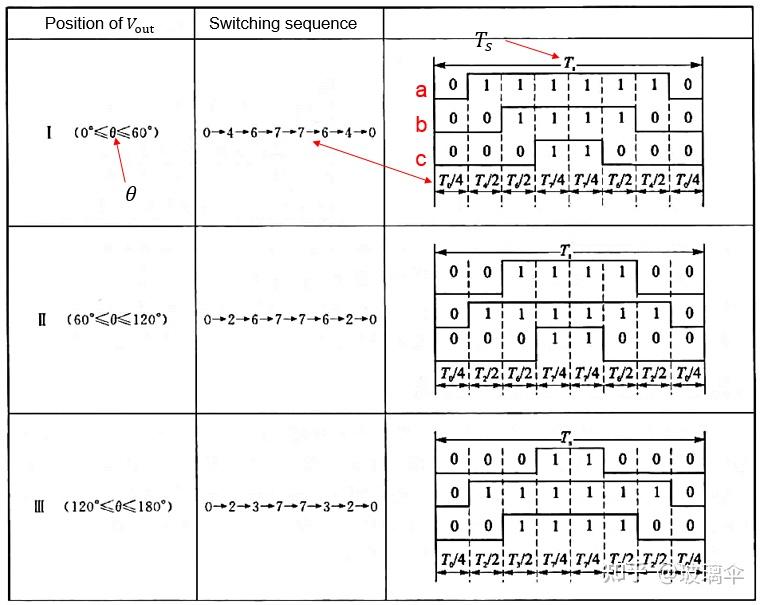
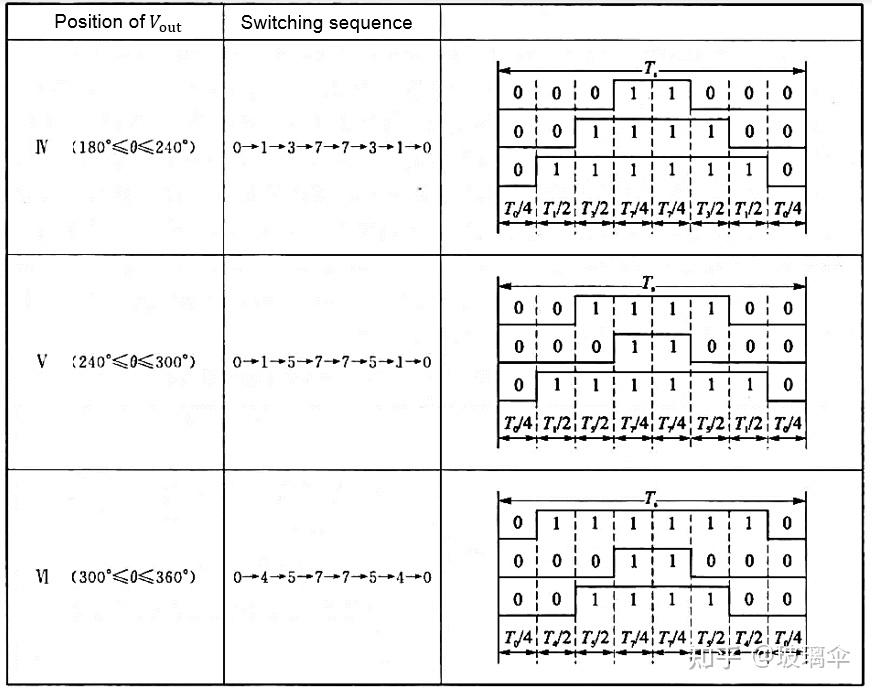
开关顺序表如下:
所谓七段式,也就是每个调制周期切换七次。
2.5 代码演示
cpp
void M1_setTorque(float Uq, float angle_el)
{
// 如果 q 轴电压为负,等价于电压矢量反向 180°
// 这样后面统一用正幅值处理
if (Uq < 0)
angle_el += _PI;
// 只保留电压幅值(方向已体现在 angle_el 中)
Uq = abs(Uq);
// dq 坐标系 → αβ 坐标系
// 在 FOC 中:q 轴比 α 轴超前 90°
// 因此需要 +π/2
angle_el = _normalizeAngle(angle_el + _PI_2);
// 根据 αβ 电压角度判断 SVPWM 扇区
// 每个扇区宽度 π/3(60°)
// sector ∈ {1,2,3,4,5,6}
int sector = floor(angle_el / _PI_3) + 1;
// ================= SVPWM 核心:计算 T1 / T2 =================
// T1:当前扇区中"后一个"有功矢量的作用时间
// √3 来自 SVPWM 电压增益
// sin(k·π/3 − θ) 是几何投影关系
float T1 = _SQRT3 * sin(sector * _PI_3 - angle_el) * Uq / voltage_power_supply;
// T2:当前扇区中"前一个"有功矢量的作用时间
float T2 = _SQRT3 * sin(angle_el - (sector - 1.0) * _PI_3) * Uq / voltage_power_supply;
// T0:零矢量时间(剩余时间)
// 一个 PWM 周期被归一化为 1
float T0 = 1 - T1 - T2;
// 三相 PWM 占空比(归一化 0~1)
float Ta, Tb, Tc;
// ================= 根据扇区分配 T1 / T2 / T0 =================
// 采用"中心对齐 PWM":
// 零矢量 T0 均分到前后(T0/2)
switch (sector)
{
case 1:
// 扇区 1:V1 → V2
Ta = T1 + T2 + T0 / 2;
Tb = T2 + T0 / 2;
Tc = T0 / 2;
break;
case 2:
// 扇区 2:V2 → V3
Ta = T1 + T0 / 2;
Tb = T1 + T2 + T0 / 2;
Tc = T0 / 2;
break;
case 3:
// 扇区 3:V3 → V4
Ta = T0 / 2;
Tb = T1 + T2 + T0 / 2;
Tc = T2 + T0 / 2;
break;
case 4:
// 扇区 4:V4 → V5
Ta = T0 / 2;
Tb = T1 + T0 / 2;
Tc = T1 + T2 + T0 / 2;
break;
case 5:
// 扇区 5:V5 → V6
Ta = T2 + T0 / 2;
Tb = T0 / 2;
Tc = T1 + T2 + T0 / 2;
break;
case 6:
// 扇区 6:V6 → V1
Ta = T1 + T2 + T0 / 2;
Tb = T0 / 2;
Tc = T1 + T0 / 2;
break;
default:
// 理论上不会进入
Ta = 0;
Tb = 0;
Tc = 0;
}
// ================= 占空比 → 实际相电压 =================
// 将归一化占空比乘以母线电压
// 得到三相等效输出电压
float Ua = Ta * voltage_power_supply;
float Ub = Tb * voltage_power_supply;
float Uc = Tc * voltage_power_supply;
// 设置 PWM(底层一般是比较寄存器)
M1_setPwm(Ua, Ub, Uc);
}