熠速方案·概览

eVTOL的核心系统主要系统
飞行控制系统:
飞控计算机、传感器、执行器
能源系统:
动力电池/燃料电池、电池管理系统、高压配电系统
推进系统:
电机及控制器、齿轮机构、螺旋桨
航电系统:
GPS、数据链、传感器
飞控系统开发和测试方案
熠速可提供飞控系统控制器的快速控制原型开发和硬件在环仿真测试平台,可满足飞控系统的数字化实时仿真测试、半物理仿真测试以及多系统的联合仿真测试。
能源系统开发和测试方案
熠速可提供能源管理系统(如电池管理系统、燃料电池控制系统)的快速控制原型开发和硬件在环仿真测试平台,可满足能源管理系统的数字化实时仿真测试、半物理仿真测试以及多系统的联合仿真测试。
推进系统开发和测试方案
熠速可提供推进控制系统(如电机控制器)的快速控制原型开发和硬件在环仿真测试平台,可满足推进控制系统的数字化实时仿真测试、半物理仿真测试以及多系统的联合仿真测试。
航电系统开发和测试方案
熠速可提供航电接口或协议仿真测试平台,可满足航电系统的数字化仿真测试、半物理仿真测试以及多系统的联合仿真测试。
熠速方案·能源系统解决方案
eVTOL的能源系统的核心在于电池管理系统(BMS)。在此领域,熠速的方案不仅对较为常见的纯电电池管理系统开发和测试有完整且丰富技术储备和项目案例之外,还具备采用氢燃料的eVTOL能源系统FCU、BMS的开发及验证能力!
熠速方案·能源系统RCP
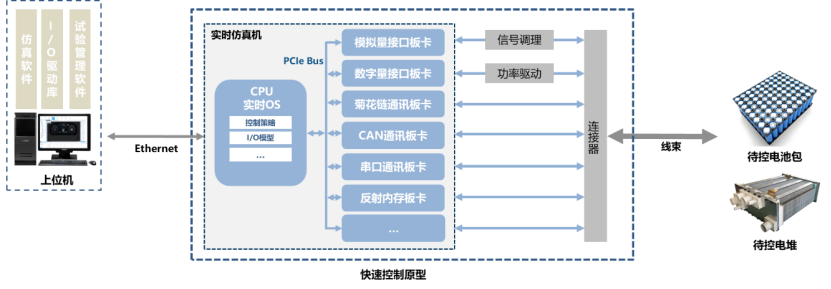
能源系统RCP解决方案系统结构图
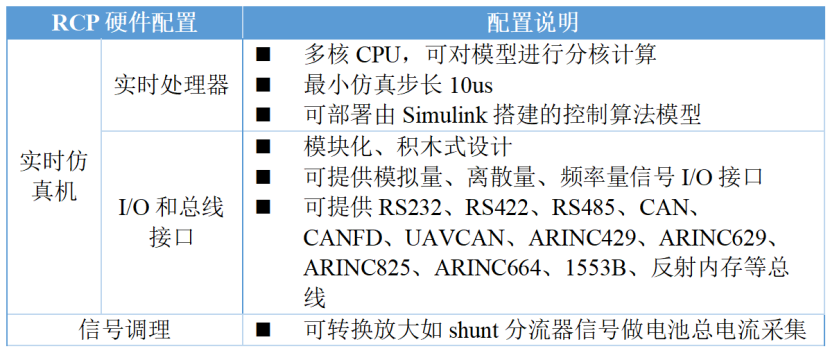
1. 快速原型控制器
由实时仿真机和信号调理和功率驱动组成。
实时仿真机
实时仿真机快速控制原型系统的硬件核心,采用X86架构,CPU中加载实时操作系统,可实时计算飞控算法。通过PCIe总线拓展各种类型的I/O和总线板卡,可用于连接外部传感器和执行器,板卡的种类和数量选择取决于飞控实际所需的接口。
信号调理
对于和传感器以及执行器规格不匹配的信号,可采用信号调理模块进行调理转换实现例如shunt类型的电流传感器信号。
功率驱动
对于BMS和FCU控制系统中,部分被控的执行器需要高边或者H桥驱动,比如BMS高压系统中的继电器或者MOS,燃料电池系统的喷氢阀等,需要使用功率驱动模块实现驱动功率放大。
2. 上位机
安装建模仿真软件、I/O驱动库、试验管理软件和自动化测试软件。
建模仿真软件
Simulink,支持使用FMU的形式导入第三方建模软件模型。
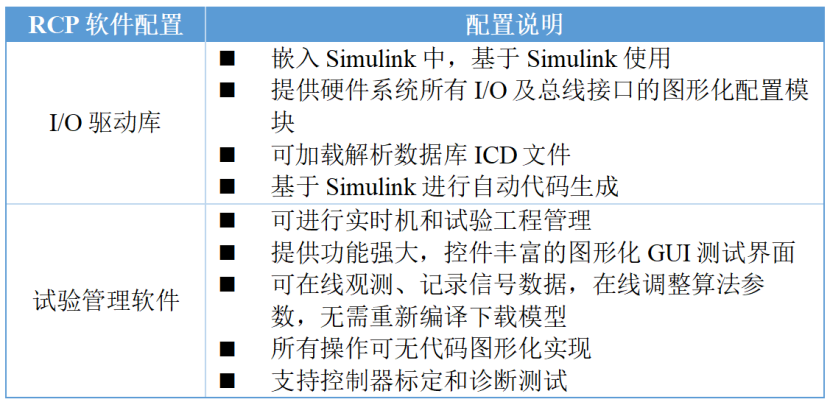
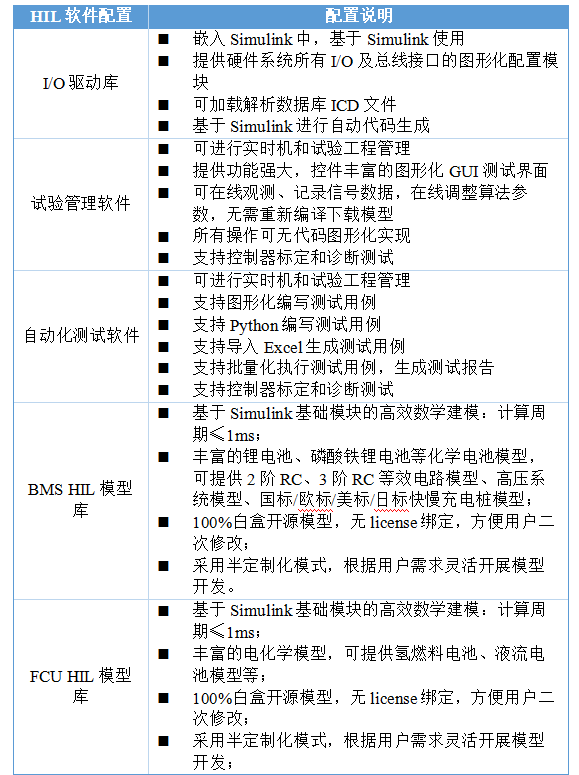
I/O驱动库
实时仿真机的所有接口和硬件配置通过I/O驱动库在Simulink模型中图形化实现,模型搭建完成之后,可通过Simulink进行自动代码生成并编译为实时机可用的可执行文件。上位机电脑通过以太网和实时仿真机连接。
试验管理软件
用于对实时机、测试工程进行配置和管理,提供丰富的图形化GUI界面,无代码实现信号数据观测、记录以及参数在线调整。
3. 待测电池包/电堆
控制对象,电池包或者燃料电池堆。
熠速能源系统RC P 方案优势
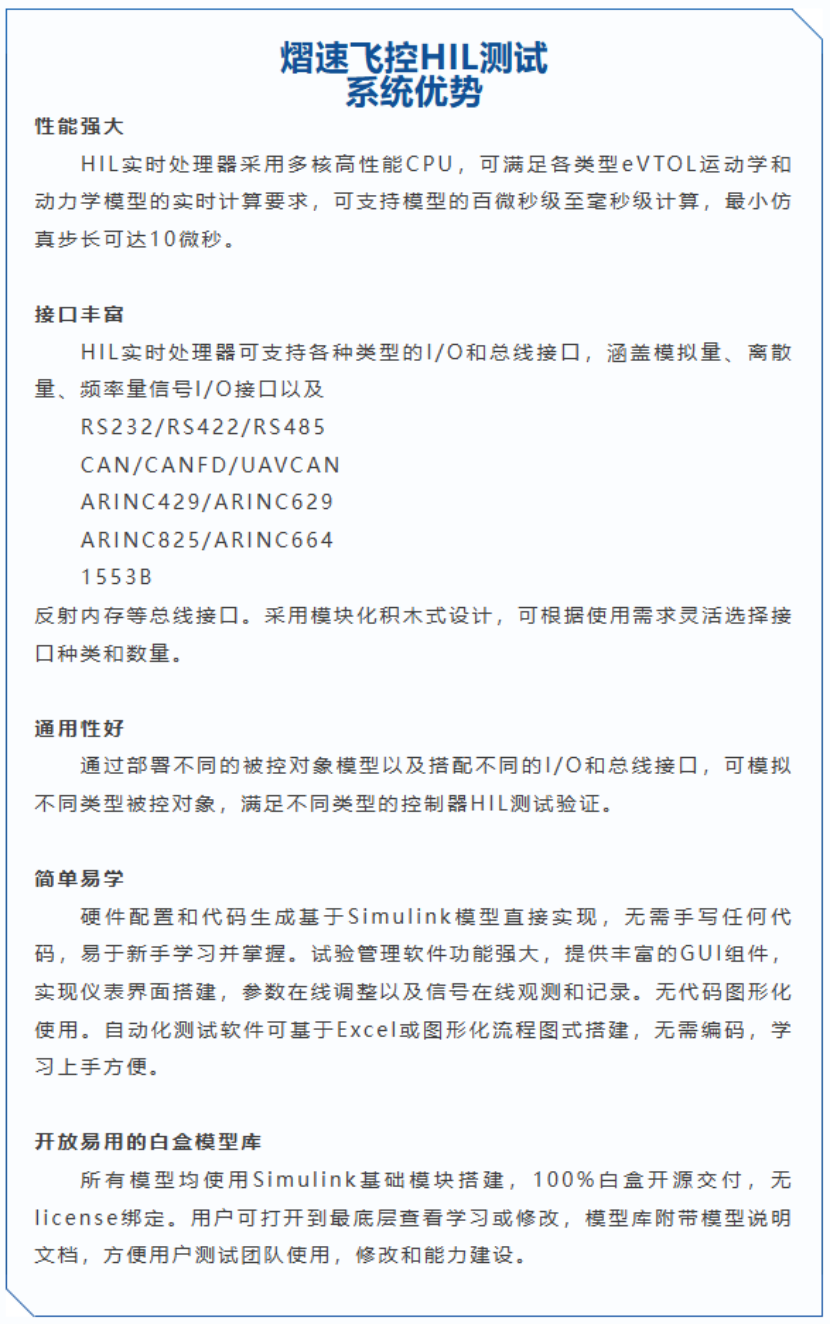
性能强大
RCP实时处理器采用多核高性能CPU,可满足各类型BMS或FCU控制算法的实时计算要求,可支持控制算法的百微秒级至毫秒级计算,最小仿真步长可达10微秒。
接口丰富
RCP实时处理器可支持各种类型的IO和总线接口,涵盖模拟量、离散量、频率量信号I/O接口以及
RS232/RS422/RS485
CAN/CAN FD/UAVCAN
ARINC429/ARINC629
ARINC825/ARINC664
1553B
反射内存等总线接口。采用模块化积木式设计,可根据使用需求灵活选择接口种类和数量。
通用性好
通过部署不同的控制算法模型以及搭配不同的I/O和总线接口,可模拟不同类型的控制器,满足不同类型的控制算法快速原型验证。
简单易 用
硬件配置和代码生成基于Simulink模型直接实现,无需手写任何代码,易于新手学习并掌握。试验管理软件功能强大,提供丰富的GUI组件,实现仪表界面搭建,参数在线调整以及信号在线观测和记录。无代码图形化使用。
熠速方案·能源系统HIL测试系统
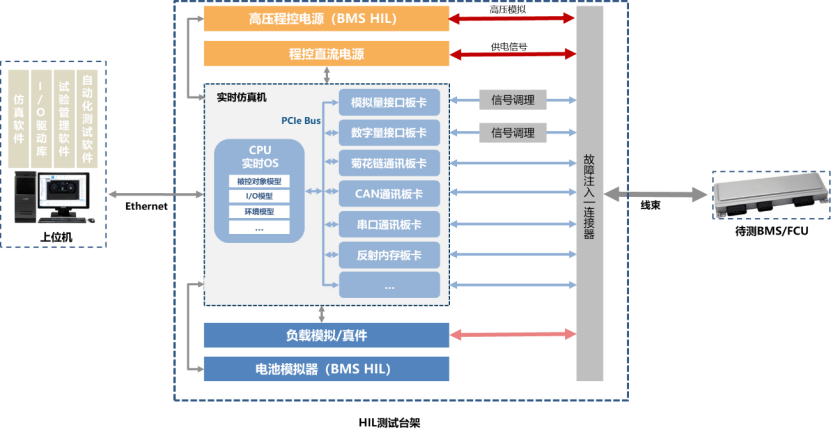
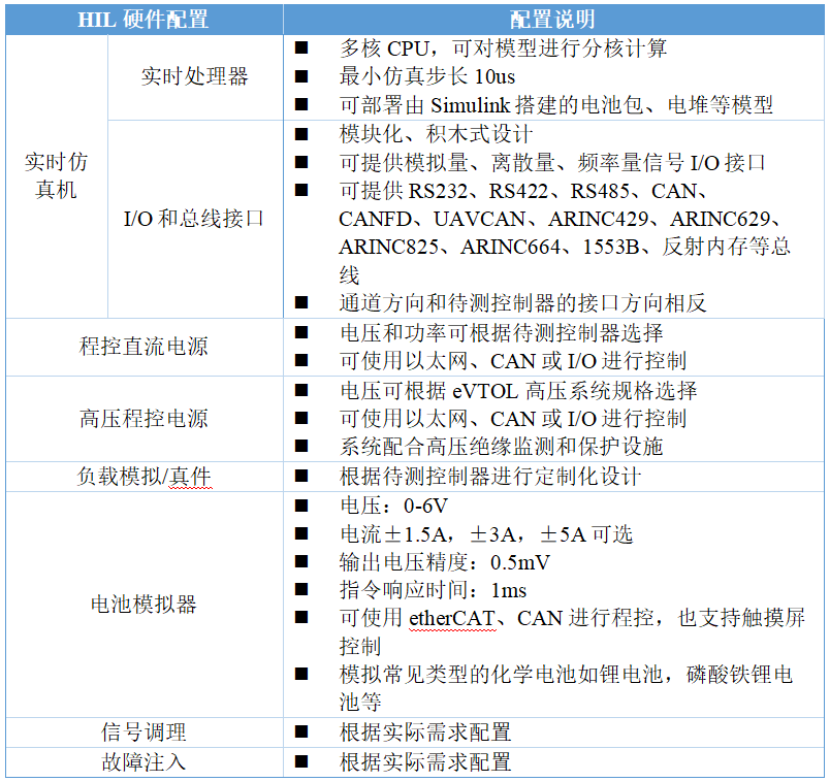
1. HIL测试台架
由实时仿真机、高压程控电源、程控直流电源、负载模拟/真件、电池模拟器、信号调理和故障注入组成。
实时仿真机
作为HIL台架的硬件核心,实时仿真机采用X86架构,CPU中加载实时操作系统,可实时计算电池包、电堆模型。通过PCIe总线拓展各种类型的I/O和总线板卡,可用于模拟传感器和执行器信号,连接真实控制器。板卡的种类和数量选择取决于待测控制器实际所需的接口。
高压程控电源
BMS HIL测试使用,用于模拟电池总压和母线高压,配合高压MOS或继电器可模拟高压上下电和预充过程。
程控直流电源
模拟控制器的低压直流供电。
负载模拟/真件
模拟执行器负载,可以通过电阻等虚拟负载的形式模拟,或者直接使用真实负载如高压继电器/MOS(BMS HIL)、喷氢阀(FCU HIL)和实时仿真虚实结合,可以更精确模拟被控对象。
电池模拟器
BMS HIL测试使用,用于模拟电池单体电压,供BMS控制板的AFE芯片采集,并实现均衡测试。
故障注入
传接到连接线束中,可实现控制器线束的开路、短路电气故障的模拟,测试控制器的诊断功能。
信号调理
对于和待测控制器连接不匹配的信号,可采用信号调理模块进行调理转换实现,比如总电流传感器shunt信号。
2. 上位机
安装建模仿真软件、I/O驱动库、试验管理软件和自动化测试软件。
建模仿真软件
Simulink,支持使用FMU的形式导入第三方建模软件模型。
对于BMS 控制器的测试
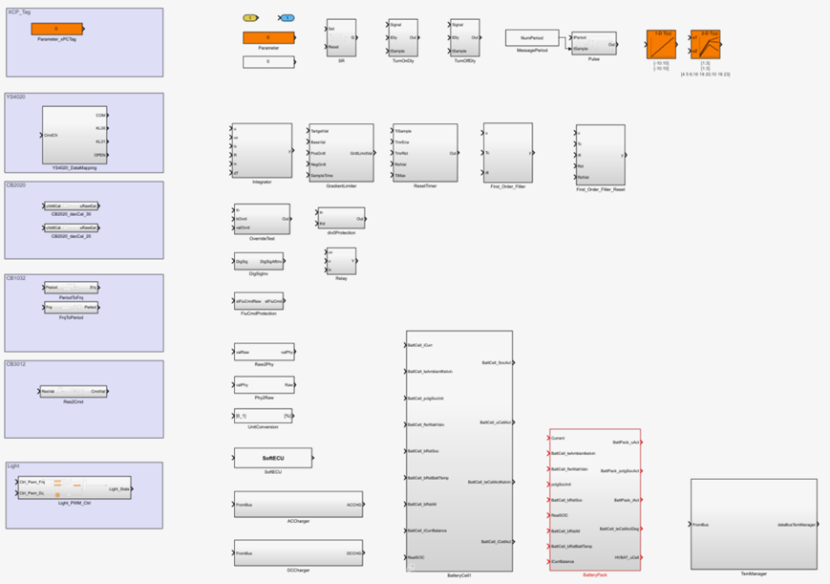
BMS HIL模型库
**基于Simulink基础模块的高效数学建模:**计算周期≤1ms;
丰富的锂电池、磷酸铁锂电池等化学电池模型,可提供2阶RC、3阶RC等效电路模型、高压系统模型、国标/欧标/美标/日标快慢充电桩模型;
100%白盒开源模型,无license绑定,方便用户二次修改;
采用半定制化模式,根据用户需求灵活开展模型开发。
对于FCU 控制器的测试
熠速可提供全套的FCU HIL测试模型库,此模型库包含eVTOL中常用的质子交换膜燃料电池(PEMFC)模型、空气路模型、氢气路模型、温度模型以及电路模型等:
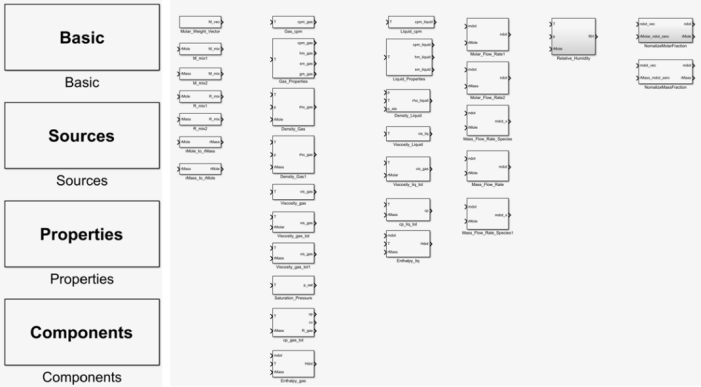
FCU HIL模型库
基于Simulink基础模块的高效数学建模:计算周期≤1ms;
丰富的电化学模型,可提供氢燃料电池、液流电池模型等;
100%白盒开源模型,无license绑定,方便用户二次修改;
采用半定制化模式,根据用户需求灵活开展模型开发;
I/O驱动库
实时仿真机的所有接口和硬件配置通过I/O驱动库在Simulink模型中图形化实现,模型搭建完成之后,可通过Simulink进行自动代码生成并编译为实时机可用的可执行文件。上位机电脑通过以太网和实时仿真机连接。
试验管理软件
用于对实时机、测试工程进行配置和管理,提供图形化的GUI界面,无代码实现信号数据观测、记录以及参数在线调整。
自动化测试软件
图形化创建测试用例,批量化执行测试用例并生成测试报告。
3. 待测BMS/FCU
需要测试的真实电池管理系统(BMS)控制器或燃料电池控制器(FCU)。