行列式
- 一、知识体系概览
- 二、预备知识:向量与矩阵基础
-
- [2.1 向量的基本概念](#2.1 向量的基本概念)
- [2.2 向量的运算规则](#2.2 向量的运算规则)
- [2.3 矩阵乘法与线性变换](#2.3 矩阵乘法与线性变换)
- 三、行列式的定义体系
-
- [3.1 几何定义(柯西视角)](#3.1 几何定义(柯西视角))
- [3.2 代数定义(逆序数法)](#3.2 代数定义(逆序数法))
-
- [3.2.1 前置概念](#3.2.1 前置概念)
- [3.2.2 定义公式](#3.2.2 定义公式)
- [3.3 展开定理(降阶定义)](#3.3 展开定理(降阶定义))
-
- [3.3.1 关键概念](#3.3.1 关键概念)
- [3.3.2 展开公式](#3.3.2 展开公式)
- [3.3.3 线性组合计算](#3.3.3 线性组合计算)
- 四、行列式的核心性质(7条)
- 五、特殊行列式结论(12+1)
-
- [4.1 三角行列式](#4.1 三角行列式)
- [4.2 副对角线行列式](#4.2 副对角线行列式)
- [4.3 拉普拉斯展开式(分块矩阵)](#4.3 拉普拉斯展开式(分块矩阵))
- [4.4 范德蒙德行列式(高频考点)](#4.4 范德蒙德行列式(高频考点))
- 六、行列式的计算方法
-
- [6.1 具体型行列式(元素为数字)](#6.1 具体型行列式(元素为数字))
-
- [6.1.1 化为基本型(最常用)](#6.1.1 化为基本型(最常用))
- [6.1.2 递推法](#6.1.2 递推法)
- [6.2 抽象型行列式(元素为矩阵符号)](#6.2 抽象型行列式(元素为矩阵符号))
- [6.3 含参数行列式(函数与方程)](#6.3 含参数行列式(函数与方程))
- 七、克拉默法则(线性方程组求解)
-
- [7.1 适用条件](#7.1 适用条件)
- [7.2 求解公式](#7.2 求解公式)
- [7.3 齐次方程组推论](#7.3 齐次方程组推论)
- 八、知识脉络与应用场景
一、知识体系概览
线性代数的知识框架可划分为三大模块:
- 基础层:行列式、矩阵(工具性核心)
- 主体层:向量组、线性方程组(核心研究对象)
- 应用层:特征值、二次型(实际问题转化)
行列式作为基础模块的核心,是刻画方阵性质的重要数值特征,其本质是n维线性变换对空间体积的缩放系数,也是向量组线性相关性的量化描述工具。
二、预备知识:向量与矩阵基础
2.1 向量的基本概念
- 定义 :n维向量是由n个数构成的有序数组,记为 α = ( a 1 , a 2 , ... , a n ) \mathbf{\alpha}=(a_1,a_2,\dots,a_n) α=(a1,a2,...,an),其中 n n n 为向量的维数。
- 几何意义:可表示n维空间中的点、有向线段或信息载体(如数据行、状态向量等)。
- 表示规范 :线性代数中常用粗体字母 a \mathbf{a} a 表示向量,无需添加箭头写成 a ⃗ \vec{a} a 。
2.2 向量的运算规则
| 运算类型 | 定义式 | 说明 |
|---|---|---|
| 加法 | α + β = ( a 1 + b 1 , a 2 + b 2 , ... , a n + b n ) \alpha+\beta=(a_1+b_1,a_2+b_2,\dots,a_n+b_n) α+β=(a1+b1,a2+b2,...,an+bn) | 仅同维向量可加,对应分量相加 |
| 数乘 | k α = ( k a 1 , k a 2 , ... , k a n ) k\alpha=(ka_1,ka_2,\dots,ka_n) kα=(ka1,ka2,...,kan) | 数与各分量相乘 |
| 点积 | ( α , β ) = ∑ i = 1 n a i b i (\alpha,\beta)=\sum_{i=1}^n a_ib_i (α,β)=∑i=1naibi | 又称内积,结果为标量 |
| 点积矩阵视角 | α T β = a 1 ... a n b 1 ⋮ b n \alpha^T\beta=\begin{bmatrix}a_1&\dots&a_n\end{bmatrix}\begin{bmatrix}b_1\\\vdots\\b_n\end{bmatrix} αTβ=a1...an b1⋮bn | 行向量与列向量的乘积即点积 |
2.3 矩阵乘法与线性变换
- 乘法规则 :设 A A A 为 m × s m\times s m×s 矩阵, B B B 为 s × n s\times n s×n矩阵,则 A B AB AB 的元素 c i j = ∑ k = 1 s a i k b k j c_{ij}=\sum_{k=1}^s a_{ik}b_{kj} cij=∑k=1saikbkj( A A A的第i行与 B B B的第j列的点积).
- 核心意义 :矩阵是线性变换的表达形式, A α = β A\alpha=\beta Aα=β表示向量 α \alpha α经 A A A变换后得到 β \beta β(如旋转、伸缩等)。
- 常见变换:旋转、伸缩、剪切、对称等,矩阵的元素位置决定变换的具体方式。
矩阵的作用:矩阵是线性变换的重要表达形式,可用于表达系统信息、描述系统的线性关系。矩阵中元素的位置具有明确意义,不能随意改动,否则会改变其表达的信息。
直观理解 : A α = β A\alpha=\beta Aα=β可看作矩阵 A A A对向量 α \alpha α施加线性变换后得到向量 β \beta β,类似于函数 f ( x ) = y f(x)=y f(x)=y的对应关系。常见的线性变换包括:对称变换、伸缩变换、剪切变换、旋转变换等。
线性代数的核心思想之一,就是通过线性变换这一对应法则进行运算,其角色类似于函数中的对应法则 f f f。
三、行列式的定义体系
行列式是n阶方阵的一个数值特征,核心刻画矩阵对应的线性变换对 "n维体积" 的缩放系数。
行列式的概念由矩阵而来,是变换的一种性质。联系高等数学中的内容,定积分与所围图像的面积是有区别的。行列式的值实际上是对变换的面积改变的一个度量,可以为负数。
行列式是方阵的"数值特征",本质是对n维向量组线性无关性的量化描述,非方阵的行/列数不相等,无法满足行列式定义中"排列逆序数求和"的运算规则(比如2×3矩阵无法构建n!项的展开式)。
3.1 几何定义(柯西视角)
行列式的几何意义是n维向量组张成的几何体体积(带符号),符号表示定向:
- 一阶行列式 :本身为一个数字,|-2|1*1 = -2,可正可负,这点要与绝对值符号区分开。
-
二阶行列式 :由 2 个 2 维向量 α = ( a , b ) , β = ( c , d ) \alpha=(a,b),\beta=(c,d) α=(a,b),β=(c,d)构成,值为以 α , β \alpha,\beta α,β为邻边的平行四边形面积: ∣ a b c d ∣ = a d − b c \begin{vmatrix}a&b\\c&d\end{vmatrix}=ad-bc acbd =ad−bc
-
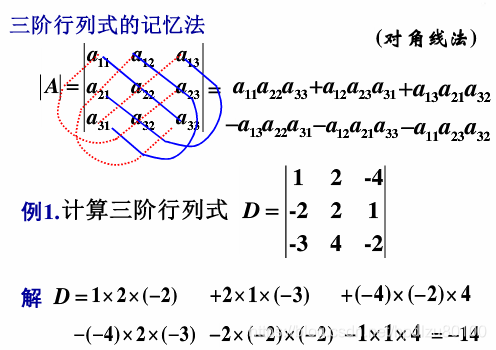
三阶行列式:由 3 个 3 维向量构成,值为以其为邻边的平行六面体体积(可通过 "沙路法"(叉子法) 计算,仅适用于 3 阶)。
-
推广 :n 阶行列式 ∣ A ∣ |A| ∣A∣表示 n 个 n 维向量张成的 n 维几何体的 "体积"(可正可负,符号表示定向)。

行列式的柯西定义法,主要结论:对 n 阶矩阵 A 的行列式 |A| ,从测度的角度来看,表示的是 n 维体积。
- 测度,一般用积分学研究,比如体积、弧长、表面积等,是数学专业"实变函数"课程中的名词。
- 性态,一般用微分学研究,比如单调性、凹凸性等。
著名公式:若 A ,B 为 n 阶矩阵,则 |AB|=|A||B|=|B||A|=|BA|,几何测度相同。
应把行列式看作是由若干个向量拼成的,并且要对这些向量作运算。
低维物体是不能用高维来衡量的,用高维测度低维必然为0,这也体现了行列式的一个性质:若行列式中有一行或一列为0,则行列式为0.
3.2 代数定义(逆序数法)
该定义虽在高阶行列式(如 n>4)计算中因项数过多( n ! n! n!增长极快)而不实用,但却是理解行列式性质(如 "交换两行 / 列,行列式变号")的理论基础。
3.2.1 前置概念
-
n 级排列 :由 1 , 2 , ... , n 1,2,\dots,n 1,2,...,n组成的有序数组(共 n ! n! n!个),如 3 级排列:123,132,...,321。
-
逆序数 :排列中"前大后小"的元素对数量,记为 τ ( j 1 j 2 ... j n ) \tau(j_1j_2\dots j_n) τ(j1j2...jn) 。
例: τ ( 231 ) = 2 \tau(231)=2 τ(231)=2(2>1,3>1)。
-
奇偶性:逆序数为偶则为偶排列,反之为奇排列。
3.2.2 定义公式
n 阶行列式 ∣ A ∣ = ∣ a i j ∣ |A|=|a_{ij}| ∣A∣=∣aij∣是所有 "取自不同行不同列的 n 个元素乘积" 的代数和,即:
∣ A ∣ = ∑ j 1 j 2 ... j n ( − 1 ) τ ( j 1 j 2 ... j n ) a 1 j 1 a 2 j 2 ... a n j n \boxed{|A|=\sum_{j_1j_2\dots j_n}(-1)^{\tau(j_1j_2\dots j_n)}a_{1j_1}a_{2j_2}\dots a_{nj_n}} ∣A∣=j1j2...jn∑(−1)τ(j1j2...jn)a1j1a2j2...anjn
核心:列标排列 j 1 j 2 ... j n j_1j_2\dots j_n j1j2...jn的逆序数决定符号(偶排列为正,奇排列为负)。
行下标顺排,对 n 个列下标排列求和,故为 n! 项之和。
例:求 a 12 a 31 a 54 a 43 a 25 a_{12}a_{31}a_{54}a_{43}a_{25} a12a31a54a43a25 这一展开项前的正、负号。
答:首先将行下标顺排为 a 12 a 25 a 31 a 43 a 54 a_{12}a_{25}a_{31}a_{43}a_{54} a12a25a31a43a54 ,然后计算 τ ( 25134 ) = 4 \tau(25134)=4 τ(25134)=4 ,为偶排列,故该项前为正号。
该定义常出题型为求多项式的系数。比如 f ( x ) = ∣ 1 2 3 x 1 2 x 3 1 x 2 3 x 1 2 x ∣ f(x)=\begin{vmatrix}1&2 & 3 & x \\1 & 2 & x&3\\ 1&x&2&3\\x&1&2& x\end{vmatrix} f(x)= 111x22x13x22x33x 求 x 3 x^3 x3 的系数。
3.3 展开定理(降阶定义)
将高阶行列式(如 4 阶、5 阶)转化为低阶行列式(如 3 阶、2 阶),降低计算复杂度。若某行(列)含多个 0,可直接省略 0 对应的项,减少计算量,是行列式后续性质的核心推导依据。
3.3.1 关键概念
- 余子式 : M i j M_{ij} Mij是去掉 a i j a_{ij} aij所在行和列后剩余元素构成的 n − 1 n-1 n−1阶行列式
- 代数余子式 : A i j = ( − 1 ) i + j M i j A_{ij}=(-1)^{i+j}M_{ij} Aij=(−1)i+jMij(带符号的余子式)
- 符号规律:呈现"棋盘格"分布 \\begin{vmatrix}+\&-\&+\\-\&+\&-\\+\&-\&+ \\end{vmatrix}
3.3.2 展开公式
-
按第 i 行展开 : ∣ D ∣ = a i 1 A i 1 + a i 2 A i 2 + ⋯ + a i n A i n ( i = 1 , 2 , ... , n ) |D|=a_{i1}A_{i1}+a_{i2}A_{i2}+\dots+a_{in}A_{in}\quad(i=1,2,\dots,n) ∣D∣=ai1Ai1+ai2Ai2+⋯+ainAin(i=1,2,...,n)
-
按第 j 列展开 : ∣ D ∣ = a 1 j A 1 j + a 2 j A 2 j + ⋯ + a n j A n j ( j = 1 , 2 , ... , n ) |D|=a_{1j}A_{1j}+a_{2j}A_{2j}+\dots+a_{nj}A_{nj}\quad(j=1,2,\dots,n) ∣D∣=a1jA1j+a2jA2j+⋯+anjAnj(j=1,2,...,n)
-
正交性推论 :某行元素与另一行代数余子式的和为0: a i 1 A k 1 + ⋯ + a i n A k n = 0 ( i ≠ k ) a_{i1}A_{k1}+\dots+a_{in}A_{kn}=0(i\neq k) ai1Ak1+⋯+ainAkn=0(i=k)。列的情况类似。
3.3.3 线性组合计算
利用展开定理,构造辅助行列式。 k 1 A i 1 + k 2 A i 2 + ⋯ + k n A i n k_1A_{i1}+k_2A_{i2}+\cdots+k_nA_{in} k1Ai1+k2Ai2+⋯+knAin 即将原行列式第 i 行的元素 a i 1 , a i 2 , ⋯ , a i n a_{i1},a_{i2},\cdots,a_{in} ai1,ai2,⋯,ain 换成了 k i 1 , k i 2 , ⋯ , k i n k_{i1},k_{i2},\cdots,k_{in} ki1,ki2,⋯,kin ,所以某行(列)元素与另一行(列)元素的代数余子式相乘为 0 ,因为两行(列)相同。
例:计算 a 11 A 21 + a 12 A 22 + ⋯ + a 1 n A 2 n a_{11}A_{21}+a_{12}A_{22}+\dots+a_{1n}A_{2n} a11A21+a12A22+⋯+a1nA2n,等价于 "第 2 行代数余子式与第 1 行元素的组合",由正交性得结果为 0。
四、行列式的核心性质(7条)
(行性质与列性质完全等价,以下以行为例)
| 序号 | 性质描述 | 数学表达 | 几何解释 |
|---|---|---|---|
| 1 | 转置不变性 | ∣ A ∣ = ∣ A T ∣ |A|=|A^T| ∣A∣=∣AT∣ | 行与列地位平等,体积缩放系数不变 |
| 2 | 零行/列性质 | 若某行(列)全为0,则 ∣ A ∣ = 0 |A|=0 ∣A∣=0 | 低维几何体体积为0 |
| 3 | 行公因子提取 | ∣ ... k a i 1 ... k a i n ... ∣ = k ∣ A ∣ \begin{vmatrix}\dots\\ka_{i1}&\dots&ka_{in}\\\dots\end{vmatrix}=k|A| ...kai1......kain =k∣A∣ | 单方向伸缩,体积缩放k倍,可证明"性质2" |
| 4 | 单行可拆分 | ∣ ... a i 1 + b i 1 ... a i n + b i n ... ∣ = ∣ A ∣ + ∣ B ∣ \begin{vmatrix}\dots\\a_{i1}+b_{i1}&\dots&a_{in}+b_{in}\\\dots\end{vmatrix}=|A|+|B| ...ai1+bi1......ain+bin =∣A∣+∣B∣(仅第i行不同) | 单方向拆分后的体积可加性 |
| 5 | 换行变号 | 交换两行后, ∣ A ′ ∣ = − ∣ A ∣ 交换两行后,|A'|=-|A| 交换两行后,∣A′∣=−∣A∣ | 改变空间定向,体积符号反转 |
| 6 | 比例行性质 | 若第 i 行 = k × 第 j 行,则 ∣ A ∣ = 0 若第i行=k×第j行,则|A|=0 若第i行=k×第j行,则∣A∣=0 | "性质2"的推论,向量共线/共面,几何体体积为0 |
| 7 | 倍加不变性 | r i + k r j r_i+kr_j ri+krj(第j行k倍加到第i行)后,|A|不变 | 平行移动不改变体积 |
重要推论:
- 两行(列)相同,交换后值不变且反号,即 -a=a ,故行列式为0.
- ∣ k A ∣ = k n ∣ A ∣ |kA|=k^n|A| ∣kA∣=kn∣A∣(矩阵整体乘k,n个维度同时缩放)
- ∣ A B ∣ = ∣ A ∣ ∣ B ∣ |AB|=|A||B| ∣AB∣=∣A∣∣B∣(复合变换的体积缩放是各变换缩放的乘积)
五、特殊行列式结论(12+1)
4.1 三角行列式
主对角线行列式(上/下三角及对角矩阵):
∣ a 11 a 12 ... a 1 n 0 a 22 ... a 2 n ⋮ ⋮ ⋱ ⋮ 0 0 ... a n n ∣ = ∣ a 11 0 ... 0 a 21 a 22 ... 0 ⋮ ⋮ ⋱ ⋮ a n 1 a n 2 ... a n n ∣ = ∣ a 11 0 ... 0 0 a 22 ... 0 ⋮ ⋮ ⋱ ⋮ 0 0 ... a n n ∣ = ∏ i = 1 n a i i \begin{vmatrix} a_{11}&a_{12}&\dots&a_{1n}\\ 0&a_{22}&\dots&a_{2n}\\ \vdots&\vdots&\ddots&\vdots\\ 0&0&\dots&a_{nn} \end{vmatrix}= \begin{vmatrix} a_{11}&0&\dots&0\\ a_{21}&a_{22}&\dots&0\\ \vdots&\vdots&\ddots&\vdots\\ a_{n1}&a_{n2}&\dots&a_{nn} \end{vmatrix}= \begin{vmatrix} a_{11}&0&\dots&0\\ 0&a_{22}&\dots&0\\ \vdots&\vdots&\ddots&\vdots\\ 0&0&\dots&a_{nn} \end{vmatrix}=\prod_{i=1}^n a_{ii} a110⋮0a12a22⋮0......⋱...a1na2n⋮ann = a11a21⋮an10a22⋮an2......⋱...00⋮ann = a110⋮00a22⋮0......⋱...00⋮ann =i=1∏naii
可用逆序数法证明。除了主对角线外,剩下所有的项,至少都会有一个 0 元素,故只有一项。因为行下标与列下标皆为顺序,故 τ ( a 11 a 22 ... a n n ) = 0 \tau(a_{11}a_{22}\dots a_{nn})=0 τ(a11a22...ann)=0 ,符号为正。
4.2 副对角线行列式
∣ a 11 ... a 1 , n − 1 a 1 n a 21 ... a 2 , n − 1 0 ⋮ ⋮ ⋮ a n 1 ... 0 0 ∣ = ∣ 0 ... 0 a 1 n 0 ... a 2 , n − 1 a 2 n ⋮ ⋮ ⋮ a n 1 ... a n , n − 1 a n n ∣ = ∣ 0 ... 0 a 1 n 0 ... a 2 , n − 1 0 ⋮ ⋮ ⋮ a n 1 ... 0 0 ∣ = ( − 1 ) n ( n − 1 ) 2 a 1 n a 2 , n − 1 ⋯ a n 1 \begin{vmatrix} a_{11} & \dots & a_{1,n-1} & a_{1n} \\ a_{21} & \dots & a_{2,n-1} & 0 \\ \vdots & & \vdots & \vdots \\ a_{n1} & \dots & 0 & 0 \end{vmatrix}= \begin{vmatrix} 0 & \dots & 0 & a_{1n} \\ 0 & \dots & a_{2,n-1} & a_{2n} \\ \vdots & & \vdots & \vdots \\ a_{n1} & \dots & a_{n,n-1} & a_{nn} \end{vmatrix}= \begin{vmatrix} 0&\dots&0&a_{1n}\\ 0&\dots&a_{2,n-1}&0\\ \vdots&&\vdots&\vdots\\ a_{n1}&\dots&0&0 \end{vmatrix}= (-1)^{\frac{n(n-1)}{2}}a_{1n}a_{2,n-1}\cdots a_{n1} a11a21⋮an1.........a1,n−1a2,n−1⋮0a1n0⋮0 = 00⋮an1.........0a2,n−1⋮an,n−1a1na2n⋮ann = 00⋮an1.........0a2,n−1⋮0a1n0⋮0 =(−1)2n(n−1)a1na2,n−1⋯an1
同样,可用逆序数法证明。只有一项, τ ( n ( n − 1 ) ... 1 ) = ( n − 1 ) + ( n − 2 ) + ⋯ + 1 = n ( n − 1 ) 2 \tau(n(n-1)\dots1)=(n-1)+(n-2)+\cdots+1=\frac{n(n-1)}2 τ(n(n−1)...1)=(n−1)+(n−2)+⋯+1=2n(n−1) .
也可理解为通过换列变号成主对角线行列式,有两种交换方法:
第 1 列与第 n 列交换,第 2 列与第 n-1 列交换,......,总共需交换 ⌊ n 2 ⌋ \lfloor\frac n 2\rfloor ⌊2n⌋ 次。
第 1 列与右侧相邻列一直交换到第 n 列,交换 n - 1 次,第 2 列交换 n - 2 次,......,共需交换 n ( n − 1 ) 2 \frac{n(n-1)}2 2n(n−1) 次。
两种方法等价: ( − 1 ) n ( n − 1 ) 2 = ( − 1 ) ⌊ n 2 ⌋ (-1)^{\frac{n(n-1)}{2}}=(-1)^{\lfloor\frac n 2\rfloor} (−1)2n(n−1)=(−1)⌊2n⌋ .
4.3 拉普拉斯展开式(分块矩阵)
分块矩阵求行列式,设 A 为 m 阶矩阵,B 为 n 阶矩阵,则
∣ A O O B ∣ = ∣ A C O B ∣ = ∣ A O C B ∣ = ∣ A ∣ ⋅ ∣ B ∣ \begin{vmatrix} A & O \\ O & B \end{vmatrix}= \begin{vmatrix} A & C \\ O & B \end{vmatrix}= \begin{vmatrix} A & O \\ C & B \end{vmatrix}= |A|\cdot|B| AOOB = AOCB = ACOB =∣A∣⋅∣B∣
保持A 、B各自内部的相对位置不变,第 m 列与右侧相邻列交换 n 次移到最后一列,第 1~(m-1) 列同理,共需交换 m ⋅ n m\cdot n m⋅n 次。可得:
∣ O A B O ∣ = ∣ C A B O ∣ = ∣ O A B C ∣ = ( − 1 ) m n ∣ A ∣ ⋅ ∣ B ∣ \begin{vmatrix} O & A \\ B & O \end{vmatrix}= \begin{vmatrix} C & A \\ B & O \end{vmatrix}= \begin{vmatrix} O & A \\ B & C \end{vmatrix}= (-1)^{mn}|A|\cdot|B| OBAO = CBAO = OBAC =(−1)mn∣A∣⋅∣B∣
以后称以上 3*4 = 12 个行列式为 "基本型" 行列式,加上下面的范德蒙德行列式,简称为 "12+1" 型行列式。
4.4 范德蒙德行列式(高频考点)
V n = ∣ 1 1 ... 1 x 1 x 2 ... x n x 1 2 x 2 2 ... x n 2 ⋮ ⋮ ⋱ ⋮ x 1 n − 1 x 2 n − 1 ... x n n − 1 ∣ = ∏ 1 ≤ i < j ≤ n ( x j − x i ) V_n=\begin{vmatrix}1&1&\dots&1\\x_1&x_2&\dots&x_n\\x_1^2&x_2^2&\dots&x_n^2\\\vdots&\vdots&\ddots&\vdots\\x_1^{n-1}&x_2^{n-1}&\dots&x_n^{n-1}\end{vmatrix}=\prod_{1\leq i<j\leq n}(x_j-x_i) Vn= 1x1x12⋮x1n−11x2x22⋮x2n−1.........⋱...1xnxn2⋮xnn−1 =∏1≤i<j≤n(xj−xi)
-
特点:列(行)为等比序列,值为所有 "大数减小数" 的乘积。盯着第二行,后一项减前一项的所有项的乘积。理解为 "高年级欺负低年级"。
-
注意:范德蒙德行列式的最后一行是 n-1 次方。
拓展例题:
∣ 1 1 1 1 1 x 1 x 2 x 3 x 4 x 5 x 1 2 x 2 2 x 3 2 x 4 2 x 5 2 x 1 3 x 2 3 x 3 3 x 4 3 x 5 3 x 1 5 x 2 5 x 3 5 x 4 5 x 5 5 ∣ \begin{vmatrix} 1&1&1&1&1\\ x_1&x_2&x_3&x_4&x_5\\ x_1^2&x_2^2&x_3^2&x_4^2&x_5^2\\ x_1^3&x_2^3&x_3^3&x_4^3&x_5^3\\ x_1^5&x_2^5&x_3^5&x_4^5&x_5^5 \end{vmatrix} 1x1x12x13x151x2x22x23x251x3x32x33x351x4x42x43x451x5x52x53x55
通用解法:令
D = ∣ 1 ⋯ 1 x 1 ⋯ x n ⋮ ⋮ x 1 n − 2 ⋯ x n n − 2 x 1 n ⋯ x n n ∣ , D n + 1 = ∣ 1 ⋯ 1 1 x 1 ⋯ x n x ⋮ ⋮ ⋮ x 1 n − 2 ⋯ x n n − 2 x n − 2 x 1 n − 1 ⋯ x n n − 1 x n − 1 x 1 n ⋯ x n n x n ∣ D = \begin{vmatrix} 1 & \cdots & 1 \\ x_1 & \cdots & x_n \\ \vdots & & \vdots \\ x_1^{n-2} & \cdots & x_n^{n-2} \\ x_1^n & \cdots & x_n^n \end{vmatrix},\quad D_{n+1} = \begin{vmatrix} 1 & \cdots & 1 & 1 \\ x_1 & \cdots & x_n & x \\ \vdots & & \vdots & \vdots \\ x_1^{n-2} & \cdots & x_n^{n-2} & x^{n-2} \\ x_1^{n-1} & \cdots & x_n^{n-1} & x^{n-1} \\ x_1^n & \cdots & x_n^n & x^n \end{vmatrix} D= 1x1⋮x1n−2x1n⋯⋯⋯⋯1xn⋮xnn−2xnn ,Dn+1= 1x1⋮x1n−2x1n−1x1n⋯⋯⋯⋯⋯1xn⋮xnn−2xnn−1xnn1x⋮xn−2xn−1xn
对 D n + 1 D_{n+1} Dn+1 的两种展开方式
-
方式1:按最后一列展开
将 D n + 1 D_{n+1} Dn+1 按含 x x x 的最后一列展开,得到关于 x x x 的多项式,其中 x n − 1 x^{n-1} xn−1 项系数为 − D -D −D: D n + 1 = k n x n − D ⋅ x n − 1 + ... D_{n+1} = k_n x^n - D \cdot x^{n-1} + \dots Dn+1=knxn−D⋅xn−1+...( k n k_n kn 为常数)
-
方式2:利用Vandermonde行列式性质
D n + 1 D_{n+1} Dn+1 为 n + 1 n+1 n+1 阶Vandermonde行列式,其值为: D n + 1 = ( x − x 1 ) ( x − x 2 ) ⋯ ( x − x n ) ⋅ ∏ j > i i , j ∈ { 1 , 2 , ... , n } ( x j − x i ) D_{n+1} = (x - x_1)(x - x_2)\cdots(x - x_n) \cdot \prod_{\substack{j>i \\ i,j \in \{1,2,\dots,n\}}} (x_j - x_i) Dn+1=(x−x1)(x−x2)⋯(x−xn)⋅∏j>ii,j∈{1,2,...,n}(xj−xi)
展开 ( x − x 1 ) ⋯ ( x − x n ) (x - x_1)\cdots(x - x_n) (x−x1)⋯(x−xn) 后, x n − 1 x^{n-1} xn−1 项系数为 − ( x 1 + x 2 + ⋯ + x n ) -(x_1 + x_2 + \dots + x_n) −(x1+x2+⋯+xn),因此 D n + 1 D_{n+1} Dn+1 中 x n − 1 x^{n-1} xn−1 项系数为: − ( x 1 + x 2 + ⋯ + x n ) ⋅ ∏ j > i i , j ∈ { 1 , 2 , ... , n } ( x j − x i ) -(x_1 + x_2 + \dots + x_n) \cdot \prod_{\substack{j>i \\ i,j \in \{1,2,\dots,n\}}} (x_j - x_i) −(x1+x2+⋯+xn)⋅∏j>ii,j∈{1,2,...,n}(xj−xi)
比较式 (1) 和 (2) 中 x n − 1 x^{n-1} xn−1 项的系数,可得最终结论: D = ( x 1 + x 2 + ⋯ + x n ) ⋅ ∏ j > i i , j ∈ { 1 , 2 , ... , n } ( x j − x i ) D = (x_1 + x_2 + \dots + x_n) \cdot \prod_{\substack{j>i \\ i,j \in \{1,2,\dots,n\}}} (x_j - x_i) D=(x1+x2+⋯+xn)⋅∏j>ii,j∈{1,2,...,n}(xj−xi)
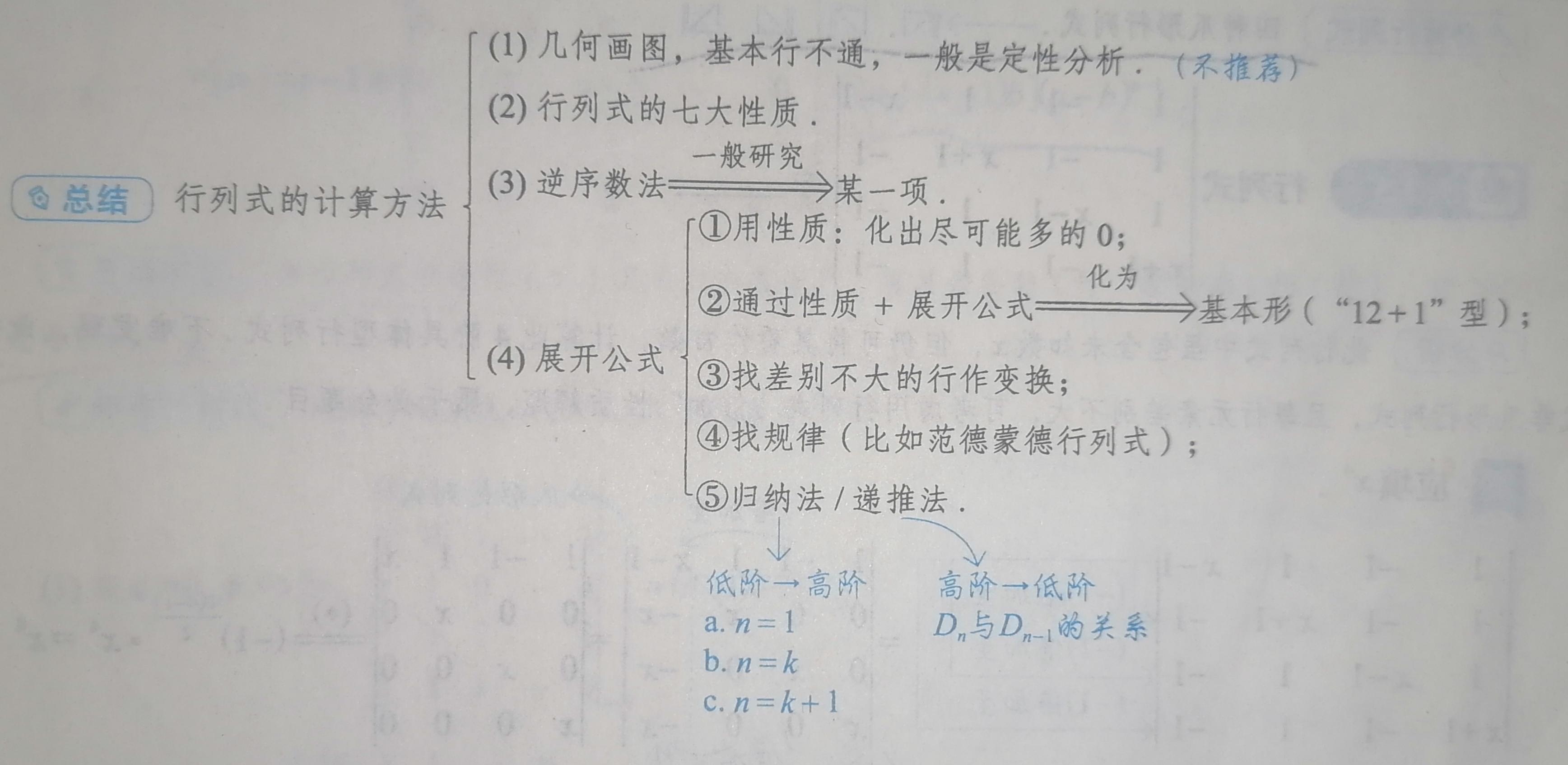
六、行列式的计算方法
6.1 具体型行列式(元素为数字)
6.1.1 化为基本型(最常用)
-
凑零降阶法:利用 "行列式某行 k 倍加到另一行,值不变" 的性质,构造大量 0 元素,再按 0 最多的行 / 列展开(降阶),简化计算。
-
四种爪形行列式 ↖ ↙ ↗ ↘ \\nwarrow \quad \\swarrow \quad \\nearrow \quad \\searrow ↖↙↗↘,仅主对角线、第一行、第一列有非零元素。
利用主对角线元素,将第一行(或第一列)非零元素化为 0,转化为三角型行列式后计算,即利用斜爪消竖爪或平爪。
-
行(列)和相等:其余列或者行统统加到第一列或第一行,再提公因式,利用前面的方法再凑0降阶。
6.1.2 递推法
适用场景:n 阶行列式有明显递归结构(如三对角行列式)。
核心 :建立 D n D_n Dn与 D n − 1 , D n − 2 D_{n-1},D_{n-2} Dn−1,Dn−2的关系,逐步降阶。
递推法和数学归纳法是两个方向,递推是给出 n 阶,推 n-1 阶,......,推到 1 阶的表达式;而数学归纳法是从 1 阶,2 阶,......,找到基本规律,然后假设高阶,假设命题对 n=k-1 时成立,最后证明命题对 n=k 时成立。
从高阶推向低阶,递推法;从低阶推向高阶,数学归纳法。
-
宽对角行列式(川型)
川型行列式的 n 阶标准形式(空白处为 0 元素)如下,需先区分三类非零元素的符号:
D n = ∣ a 1 b 1 0 0 ⋯ 0 c 1 a 2 b 2 0 ⋯ 0 0 c 2 a 3 b 3 ⋯ 0 ⋮ ⋮ ⋮ ⋮ ⋱ ⋮ 0 0 0 c n − 2 a n − 1 b n − 1 0 0 0 0 c n − 1 a n ∣ D_n = \begin{vmatrix} a_1 & b_1 & 0 & 0 & \cdots & 0 \\ c_1 & a_2 & b_2 & 0 & \cdots & 0 \\ 0 & c_2 & a_3 & b_3 & \cdots & 0 \\ \vdots & \vdots & \vdots & \vdots & \ddots & \vdots \\ 0 & 0 & 0 & c_{n-2} & a_{n-1} & b_{n-1} \\ 0 & 0 & 0 & 0 & c_{n-1} & a_n \end{vmatrix} Dn= a1c10⋮00b1a2c2⋮000b2a3⋮0000b3⋮cn−20⋯⋯⋯⋱an−1cn−1000⋮bn−1an
思路:先展开第一行,再展开第一列,寻找递推公式。如二阶递推式 (核心公式): D n = a 1 D n − 1 − b 1 c 1 D n − 2 D_n = a_1 D_{n-1} - b_1 c_1 D_{n-2} Dn=a1Dn−1−b1c1Dn−2
若川型行列式的同一条对角线元素全相等 ,递推式简化为 D n = a D n − 1 − b c D n − 2 D_n = a D_{n-1} - b c D_{n-2} Dn=aDn−1−bcDn−2,此时可通过特征根法求闭合公式。
对于 n 阶行列式,记 Δ = k 2 − 4 b c \Delta=k^2-4bc Δ=k2−4bc ,有
∣ k b c ⋱ ⋱ ⋱ ⋱ b c k ∣ n = { ( n + 1 ) ⋅ ( k 2 ) n , Δ = 0 , ( k + Δ ) n + 1 − ( k − Δ ) n + 1 2 n + 1 Δ , Δ ≠ 0 \begin{vmatrix} k & b & & \\ c & \ddots & \ddots & \\ & \ddots & \ddots & b \\ & & c & k \end{vmatrix}_n= \begin{cases} (n + 1) \cdot \left( \frac{k}{2} \right)^n , \Delta=0, \\ \frac{(k+\sqrt{\Delta})^{n+1} - (k-\sqrt{\Delta})^{n+1}}{2^{n+1}\sqrt{\Delta}},\Delta\neq0 \end{cases} kcb⋱⋱⋱⋱cbk n={(n+1)⋅(2k)n,Δ=0,2n+1Δ (k+Δ )n+1−(k−Δ )n+1,Δ=0
- 类对称行列式(主对角线元素相同,左下、右上各元素相同行列式)
∣ a b ... b c a ... b ⋮ ⋮ ⋱ ⋮ c c ... a ∣ = { ( a − b ) n − 1 a + ( n − 1 ) b , b = c b ( a − c ) n − c ( a − b ) n b − c , b ≠ c \begin{vmatrix} a&b&\dots&b\\ c&a&\dots&b\\ \vdots&\vdots&\ddots&\vdots\\ c&c&\dots&a \end{vmatrix}= \begin{cases} (a - b)^{n-1}a + (n-1)b &,b=c\\ \frac{b(a - c)^n - c(a - b)^n}{b - c} &,b\neq c \end{cases} ac⋮cba⋮c......⋱...bb⋮a ={(a−b)n−1a+(n−1)bb−cb(a−c)n−c(a−b)n,b=c,b=c
当 a 在副对角线上时,在原公式前加 ( − 1 ) n ( n − 1 ) 2 (-1)^{\frac{n(n-1)}2} (−1)2n(n−1) .
-
"X" 型行列式
空白位置元素均为 0,仅两条对角线有非零元素,可通过 "行交换" 转化为三角型或分块行列式,或直接展开找递推公式。
比如 D 4 = ∣ 1 5 2 4 6 7 8 9 ∣ D_4=\begin{vmatrix}1&&&5\\&2&4&\\&6&7&\\8&&&9\end{vmatrix} D4= 18264759 ,可以转化为 ∣ 1 5 8 9 2 4 6 7 ∣ \begin{vmatrix}1&5&&\\8&9&&\\&&2&4\\&&6&7\end{vmatrix} 18592647
D 2 k = ∣ a 1 b 1 a 2 b 2 ⋯ ⋯ a k b k b k + 1 a k + 1 ⋯ ⋯ b 2 k − 1 a 2 k − 1 b 2 k a 2 k ∣ 2 k = ∏ i = 1 k ( a i a 2 k + 1 − i − b i b 2 k + 1 − i ) D_{2k} = \begin{vmatrix} a_1 & & & & & & & b_1 \\ & a_2 & & & & & b_2 & \\ & & \cdots & & & \cdots & & \\ & & & a_k & b_k & & & \\ & & & b_{k+1} & a_{k+1} & & & \\ & & \cdots & & & \cdots & & \\ & b_{2k-1} & & & & & a_{2k-1} & \\ b_{2k} & & & & & & & a_{2k} \end{vmatrix}{2k}=\prod{i=1}^k \left( a_i a_{2k+1-i} - b_i b_{2k+1-i} \right) D2k= a1b2ka2b2k−1⋯⋯akbk+1bkak+1⋯⋯b2a2k−1b1a2k 2k=i=1∏k(aia2k+1−i−bib2k+1−i)
特别地,有如下式子:
D 2 k = ∣ a b ⋯ ⋯ a b c d ⋯ ⋯ c d ∣ 2 k = ( a d − b c ) k D_{2k} = \begin{vmatrix} a & & & & & b \\ & \cdots & & & \cdots & \\ & & a & b & & \\ & & c & d & & \\ & \cdots & & & \cdots & \\ c & & & & & d \end{vmatrix}_{2k}= (ad-bc)^k D2k= ac⋯⋯acbd⋯⋯bd 2k=(ad−bc)k
以上两个公式通常用于后续矩阵的正定问题、二次型问题,并非只用于计算行列式。
6.2 抽象型行列式(元素为矩阵符号)
- 核心公式 :
- ∣ A B ∣ = ∣ A ∣ ∣ B |AB|=|A||B ∣AB∣=∣A∣∣B( A , B A,B A,B为同阶方阵)
- ∣ A − 1 ∣ = ∣ A ∣ − 1 |A^{-1}|=|A|^{-1} ∣A−1∣=∣A∣−1( A A A可逆)
- ∣ k A ∣ = k n ∣ A ∣ |kA|=k^n|A| ∣kA∣=kn∣A∣( n n n为矩阵阶数)
- ∣ α 1 , ... , k α i , ... , α n ∣ = k ∣ α 1 , ... , α i , ... , α n ∣ |\alpha_1,\dots,k\alpha_i,\dots,\alpha_n|=k|\alpha_1,\dots,\alpha_i,\dots,\alpha_n| ∣α1,...,kαi,...,αn∣=k∣α1,...,αi,...,αn∣
- 技巧:利用矩阵分块、初等变换转化为已知行列式。
比如,利用矩阵的分块乘法可得到等式 ( α 1 + α 2 , α 2 + α 3 , α 3 + α 1 ) = ( α 1 , α 2 , α 3 ) ( 1 0 1 1 1 0 0 1 1 ) (\alpha_1+\alpha_2,\alpha_2+\alpha_3,\alpha_3+\alpha_1)=(\alpha_1,\alpha_2,\alpha_3)\begin{pmatrix}1&0&1\\1&1&0\\0&1&1\end{pmatrix} (α1+α2,α2+α3,α3+α1)=(α1,α2,α3) 110011101
A ( B X ) A(BX) A(BX) 相似与高等数学中的复合函数 f g ( x ) fg(x) fg(x) :g 先作用在 x 上,f 再作用在 g(x) 上,作用顺序都是从右向左。矩阵中的运算, A B = B A AB=BA AB=BA 不一定成立,这从变换的角度来看很容易理解。但若 A,B 均为方阵,则 ∣ A B ∣ = ∣ A ∣ ∣ B ∣ |AB|=|A||B| ∣AB∣=∣A∣∣B∣ 的意义为:复合变换之后的面积测度 |AB| = A的面积值|A| * B的面积值|B| = |BA|。
AB = O ,则B的列向量均是方程组 Ax=0的解,若 ∣ B ∣ ≠ 0 |B|\neq0 ∣B∣=0 则 A=O,因为 ∣ B ∣ ≠ 0 |B|\neq 0 ∣B∣=0 ,故 B 可逆,有 A = A B B − 1 = O B − 1 = O A=ABB^{-1}=OB^{-1}=O A=ABB−1=OB−1=O .
高阶带字母行列式,比较抽象。有两种基本类型:一种与高阶数值型行列式类似,有一定规律性;另一种主要通过行、列变换,与已知行列式对应,代值计算。
6.3 含参数行列式(函数与方程)
- 若行列式元素含变量 λ \lambda λ,则行列式为 λ \lambda λ的多项式
- 求根方法:通过行列式性质化简,找到多项式的因式分解形式
- 应用:特征值计算( ∣ λ E − A ∣ = |\lambda E-A|= ∣λE−A∣=的根即为特征值)
函数可以用含有变量的行列式表示,因此,对这类行列式当然也可以求极限、导数、积分等。涉及到后面矩阵关于特征值、特征向量的问题。
n重根指多项式方程中某个根作为解出现的次数为 n .
七、克拉默法则(线性方程组求解)
7.1 适用条件
-
方程组为 n n n 元 n n n 式: { a 11 x 1 + a 12 x 2 + ⋯ + a 1 n x n = b 1 a 21 x 1 + a 22 x 2 + ⋯ + a 2 n x n = b 2 ⋮ a n 1 x 1 + a n 2 x 2 + ⋯ + a n n x n = b n \begin{cases} a_{11}x_1 + a_{12}x_2 + \dots + a_{1n}x_n = b_1 \\ a_{21}x_1 + a_{22}x_2 + \dots + a_{2n}x_n = b_2 \\ \vdots \\ a_{n1}x_1 + a_{n2}x_2 + \dots + a_{nn}x_n = b_n \end{cases} ⎩ ⎨ ⎧a11x1+a12x2+⋯+a1nxn=b1a21x1+a22x2+⋯+a2nxn=b2⋮an1x1+an2x2+⋯+annxn=bn
-
系数行列式 D = ∣ A ∣ = ∣ a 11 a 12 ... a 1 n a 21 a 22 ... a 2 n ⋮ ⋮ ⋱ ⋮ a n 1 a n 2 ... a n n ∣ ≠ 0 D=|A| = \begin{vmatrix} a_{11} & a_{12} & \dots & a_{1n} \\ a_{21} & a_{22} & \dots & a_{2n} \\ \vdots & \vdots & \ddots & \vdots \\ a_{n1} & a_{n2} & \dots & a_{nn} \end{vmatrix}\neq0 D=∣A∣= a11a21⋮an1a12a22⋮an2......⋱...a1na2n⋮ann =0(保证解的唯一性)
7.2 求解公式
构造 D j D_j Dj:将 A A A的第 j j j列替换为常数项 ( b 1 , ... , b n ) T (b_1,\dots,b_n)^T (b1,...,bn)T,则:
x j = D j D ( j = 1 , 2 , ... , n ) x_j=\frac{D_j}{D}\quad(j=1,2,\dots,n) xj=DDj(j=1,2,...,n)
若行列式 D = 0 D=0 D=0 ,则非齐次方程组无解或有无穷多解。
7.3 齐次方程组推论
对于 A x = 0 Ax=0 Ax=0(常数项全为0):
- 若 D ≠ 0 D\neq0 D=0 ⇒ 只有零解( x 1 = x 2 = ⋯ = x n = 0 x_1=x_2=\dots=x_n=0 x1=x2=⋯=xn=0)
- 若存在非零解 ⇨ D = 0 D=0 D=0(充分必要条件)
解的概念:对于方程而言,把解代入方程中,使得等式恒成立,就被称为解。
八、知识脉络与应用场景
理论关联:
- 行列式 ⇨ 矩阵可逆性( ∣ A ∣ ≠ 0 ⇔ |A|\neq0\Leftrightarrow ∣A∣=0⇔可逆)
- 行列式 ⇨ 向量组相关性( ∣ A ∣ = 0 ⇔ |A|=0\Leftrightarrow ∣A∣=0⇔列向量线性相关)
- 行列式 ⇨ 特征值(特征方程 ∣ λ E − A ∣ = 0 |\lambda E-A|=0 ∣λE−A∣=0)
典型应用:
- 解析几何:计算图形面积/体积
- 物理建模:描述线性变换对物理量的缩放
- 数据科学:判断特征向量组的相关性
- 工程问题:求解线性系统的唯一解
行列式作为线性代数的基础工具,其核心价值在于将矩阵的抽象性质转化为具体的数值特征,为后续研究向量空间、线性变换等提供了量化分析的途径。