在上篇中,我们探讨了智能体的本质定义及其从"规则驱动"到"大模型驱动"的演进。本篇将深入剖析智能体的分类体系,并利用 PEAS 模型对任务环境进行精确规约。
1.1.3 智能体的类型
(1) 基于内部决策架构的分类
第一种分类维度是依据智能体内部决策架构的复杂程度。传统智能体的演进路径本身就构成了最经典的分类阶梯:从简单的反应式智能体,到引入内部模型的模型式智能体,再到更具前瞻性的基于目标和基于效用的智能体 。
(2) 基于时间与反应性的分类
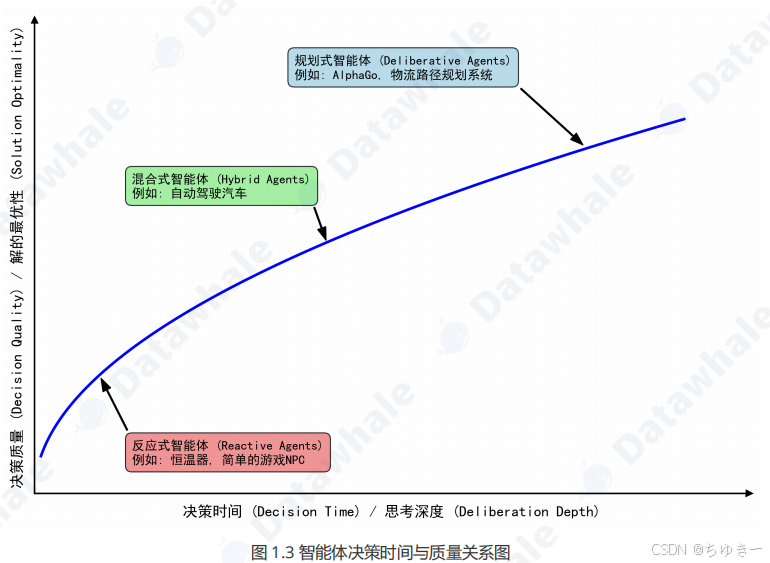
除了内部架构的复杂性,还可以从智能体处理决策的时间维度进行分类。这个视角揭示了智能体设计中一个核心权衡:追求速度的反应性 (Reactivity) 与追求最优解的规划性 (Deliberation) 之间的平衡 。
下图展示了两者在决策时间与决策质量上的关系:
-
反应式智能体 (Reactive Agents)
- 特点:对环境刺激做出近乎即时的响应,决策延迟极低。遵循从感知到行动的直接映射。
- 优势:速度快、计算开销低。适用于车辆安全气囊、高频交易等场景。
- 代价:"短视"。由于缺乏长远规划,容易陷入局部最优,难以完成需要多步骤协调的复杂任务。
-
规划式智能体 (Deliberative Agents)
- 特点:在行动前会利用内部世界模型,系统地探索未来的各种可能性,评估不同行动序列的后果。
- 优势:决策具有战略性和远见。适用于制定商业计划或规划长途旅行。
- 代价:高昂的时间和计算成本。在瞬息万变的环境中,可能因思考过久而错过行动时机。
-
混合式智能体 (Hybrid Agents)
- 定义:结合两者的优点,实现反应与规划的平衡。
- 现代 LLM 智能体模式:通常在一个"思考-行动-观察"的循环中运作,巧妙地将两种模式融为一体:
- 规划 (Reasoning):在"思考"阶段,LLM 分析状况并规划下一步。这是一个审议过程。
- 反应 (Acting & Observing):在"行动"和"观察"阶段,智能体与工具交互并获得反馈。这是一个反应过程。
(3) 基于知识表示的分类
这是一个更根本的分类维度,它探究智能体用以决策的知识,究竟是以何种形式存于其"思想"之中 。
-
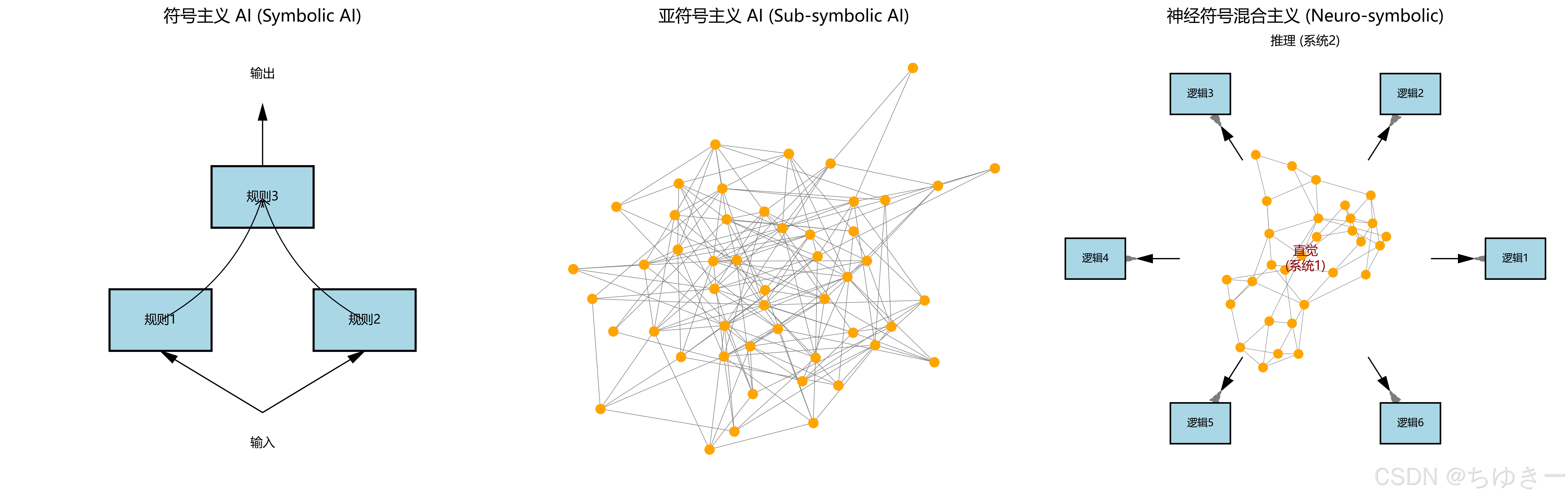
符号主义 AI (Symbolic AI)
- 核心信念:智能源于对符号(如词语、概念)的逻辑操作。
- 比喻:"一丝不苟的图书管理员",将知识整理为规则库和知识图谱。
- 优势:透明、可解释。决策过程可完整追溯。
- 缺陷:脆弱性与"知识获取瓶颈"。难以应对模糊和例外的现实世界。
-
亚符号主义 AI (Sub-symbolic AI)
- 核心信念:知识内隐地分布在神经网络中,是从海量数据中学习到的统计模式。
- 比喻:"牙牙学语的孩童",通过看成千上万张图来辨识"猫"的视觉模式,而非学习规则。
- 优势:强大的模式识别能力,对噪声数据鲁棒。
- 缺陷:黑箱 (Black Box) 与不透明性。难以解释"为什么",且可能产生幻觉。
-
神经符号主义 AI (Neuro-Symbolic AI)
- 目标:融合两大范式,创造既能从数据学习又能进行逻辑推理的混合智能体。
- 理论支撑 :丹尼尔·卡尼曼的《思考,快与慢》双系统理论。
- 系统 1:快速、直觉、并行(类似于亚符号主义)。
- 系统 2:缓慢、有条理、逻辑审慎(类似于符号主义)。
LLM 实践:LLM 智能体是神经符号主义的极佳实践。其内核(神经网络)提供模式识别(系统 1),而通过生成结构化的"思想、计划" (Chain of Thought),实现了逻辑推理(系统 2)。
1.2 智能体的构成与运行原理
1.2.1 任务环境定义
要理解智能体的运作,我们必须先理解它所处的任务环境。在人工智能领域,通常使用 PEAS 模型 来精确描述一个任务环境 。
PEAS 模型详解(以智能旅行助手为例)
下表展示了如何运用 PEAS 模型对智能旅行助手进行规约 :
| 维度 | 描述 |
|---|---|
| Performance (性能度量) | 在预算和时间内,最大化用户满意度与行程合理性 |
| Environment (环境) | 航旅预订网站、地图服务、天气预报 API 等网络服务 |
| Actuators (执行器) | 调用 API 的函数、向用户界面生成和显示格式化文本 |
| Sensors (传感器) | 解析 API 返回的数据 (如 JSON, HTML)、读取用户输入的自然语言 |
现代 LLM 智能体环境的复杂特性
在实践中,LLM 智能体所处的数字环境展现出若干复杂特性,直接影响设计 :
-
部分可观察 (Partially Observable) :
智能体无法一次性获取全貌。例如,无法一次性拉取所有航司的所有数据,必须具备记忆 (记住已查过的)和探索(尝试不同日期)的能力。
-
随机性 (Stochastic) :
行动结果不确定。例如,两次查询机票,价格和余票可能不同。智能体必须具备处理不确定性、监控变化的能力。
-
多智能体 (Multi-agent) :
环境中存在其他行动者(如其他用户的抢票行为、航司的动态调价系统)。这要求智能体能快速响应。
-
序贯且动态 (Sequential & Dynamic):
- 序贯:当前动作影响未来。
- 动态:环境自身在变化。智能体的"感知-思考-行动-观察"循环必须快速适应。