文章目录
- 前言
- 一、模型结构
- [二、init 函数 + 算子统计](#二、init 函数 + 算子统计)
- [三、forward 函数](#三、forward 函数)
-
- [3.1 算子 - causal_conv1d_update - 增量更新卷积(推理模式)](#3.1 算子 - causal_conv1d_update - 增量更新卷积(推理模式))
- [3.2 算子 - causal_conv1d_fn - 全序列因果卷积(训练模式)](#3.2 算子 - causal_conv1d_fn - 全序列因果卷积(训练模式))
- [3.3 causal_conv1d_fn 和 causal_conv1d_update 的区别总结](#3.3 causal_conv1d_fn 和 causal_conv1d_update 的区别总结)
- [3.4 算子 - chunk_gated_delta_rule](#3.4 算子 - chunk_gated_delta_rule)
-
- [3.4.1 代码](#3.4.1 代码)
- [3.4.2 总体功能概览](#3.4.2 总体功能概览)
- [3.4.3 源码逐行分析](#3.4.3 源码逐行分析)
- [3.4.4 两个 mask 矩阵](#3.4.4 两个 mask 矩阵)
- [3.4.5 chunk 的并行技术](#3.4.5 chunk 的并行技术)
- [3.4.6 chunk 的并行技术原理解析](#3.4.6 chunk 的并行技术原理解析)
- [3.4.7 总结:](#3.4.7 总结:)
- [3.5 算子 - fused_recurrent_gated_delta_rule](#3.5 算子 - fused_recurrent_gated_delta_rule)
- 参考
前言
本文将深入解析 Qwen-3-next 模型中 class Qwen3NextGatedDeltaNet 的实现机制,该代码位于 GitHub 上的 transformers 项目。
源码路径:src/transformers/models/qwen3_next/modeling_qwen3_next.py
在 Transformer / 注意力机制代码中,(B, L, H, D) 是 HuggingFace 等多数 Transformer 层的输出格式
在 HuggingFace Transformers、绝大多数标准 Multi-Head Attention 实现里:
(Batch, Sequence_length, Num_heads, Head_dim)也就是:
| 维度 | 含义 |
|---|---|
| B | batch size |
| L | 序列长度(token 数) |
| H | head 个数 |
| D | 每个 head 的特征维度 |
这是 Transformer encoder/decoder 层中最常用的形状。
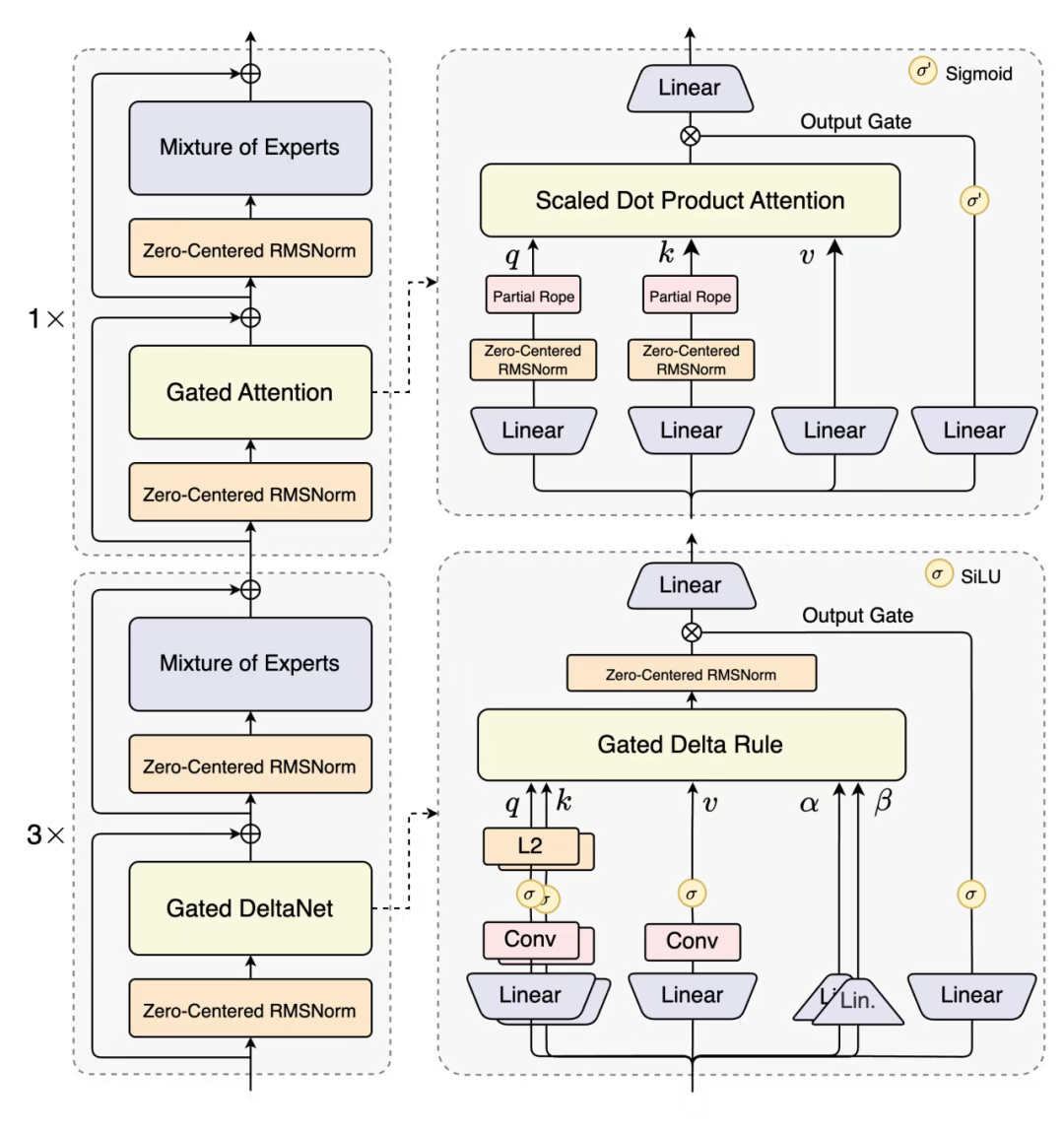
一、模型结构
-
75% 采用 Gated DeltaNet(线性注意力)技术:轻松处理 32K、64K 乃至 256K 的超长文本,速度极快且内存占用仅呈线性增长 ,彻底解决"文本越长越卡顿"的问题。
-
25% 运用原创的 Gated Attention(门控注意力)机制:精准捕捉关键信息,**确保模型"重点记忆"**能力,避免在长文本处理过程中丢失重要内容 。(可以参考【Qwen 团队 NeurIPS 2025 重磅成果】门控注意力为何能革新大模型架构?)
二、init 函数 + 算子统计
输入 hidden_states 线性投影得到 Q \mathbf{Q} Q K \mathbf{K} K V \mathbf{V} V Z \mathbf{Z} Z α \mathbf{\alpha} α β \mathbf{\beta} β
python
class Qwen3NextGatedDeltaNet(nn.Module):
def __init__(self, config: Qwen3NextConfig, layer_idx: int):
super().__init__()
self.hidden_size = config.hidden_size
self.num_v_heads = config.linear_num_value_heads
self.num_k_heads = config.linear_num_key_heads
self.head_k_dim = config.linear_key_head_dim
self.head_v_dim = config.linear_value_head_dim
self.key_dim = self.head_k_dim * self.num_k_heads
self.value_dim = self.head_v_dim * self.num_v_heads
self.conv_kernel_size = config.linear_conv_kernel_dim
self.layer_idx = layer_idx
self.activation = config.hidden_act
self.act = ACT2FN[config.hidden_act]
self.layer_norm_epsilon = config.rms_norm_eps
# QKV
self.conv_dim = self.key_dim * 2 + self.value_dim
# 因果卷积
self.conv1d = nn.Conv1d(
in_channels=self.conv_dim,
out_channels=self.conv_dim,
bias=False,
kernel_size=self.conv_kernel_size,
groups=self.conv_dim,
padding=self.conv_kernel_size - 1,
)
# projection of the input hidden states
# qkvz - [b, s, key_dim * 2 + value_dim * 2]
projection_size_qkvz = self.key_dim * 2 + self.value_dim * 2
# ba - [b, s, num_v_heads * 2]
projection_size_ba = self.num_v_heads * 2
self.in_proj_qkvz = nn.Linear(self.hidden_size, projection_size_qkvz, bias=False)
self.in_proj_ba = nn.Linear(self.hidden_size, projection_size_ba, bias=False)
# time step projection (discretization)
# instantiate once and copy inv_dt in init_weights of PretrainedModel
self.dt_bias = nn.Parameter(torch.ones(self.num_v_heads))
A = torch.empty(self.num_v_heads).uniform_(0, 16)
self.A_log = nn.Parameter(torch.log(A))
self.norm = (
Qwen3NextRMSNormGated(self.head_v_dim, eps=self.layer_norm_epsilon)
if FusedRMSNormGated is None
else FusedRMSNormGated(
self.head_v_dim,
eps=self.layer_norm_epsilon,
activation=self.activation,
device=torch.cuda.current_device(),
dtype=config.dtype if config.dtype is not None else torch.get_default_dtype(),
)
)
self.out_proj = nn.Linear(self.value_dim, self.hidden_size, bias=False)
# 算子 - causal_conv1d_fn
self.causal_conv1d_fn = causal_conv1d_fn
# 算子 - causal_conv1d_update
self.causal_conv1d_update = causal_conv1d_update or torch_causal_conv1d_update
# 算子 - chunk_gated_delta_rule
self.chunk_gated_delta_rule = chunk_gated_delta_rule or torch_chunk_gated_delta_rule
# 算子 - fused_recurrent_gated_delta_rule
self.recurrent_gated_delta_rule = fused_recurrent_gated_delta_rule or torch_recurrent_gated_delta_rule| 序号 | 注释中的算子名称 | 对应代码变量 / 函数 | 说明 |
|---|---|---|---|
| 1 | causal_conv1d_fn | self.causal_conv1d_fn |
CUDA/CPU fused causal conv1d 函数,用于 chunk 推理 |
| 2 | causal_conv1d_update | self.causal_conv1d_update |
用于增量推理(incremental decoding)的 causal conv1d 状态更新(state update) |
| 3 | chunk_gated_delta_rule | self.chunk_gated_delta_rule |
chunk 维度上的增量 gating + delta rule 计算,用于一次处理多个 token |
| 4 | fused_recurrent_gated_delta_rule | self.recurrent_gated_delta_rule |
fused recurrent 形式的 gated delta rule,用于 token-by-token 推理(纯增量) |
关于双版本算子的使用说明 :
1、优先使用高性能版本(编译版本)
- 示例算子:
causal_conv1d_update、chunk_gated_delta_rule、fused_recurrent_gated_delta_rule - 特性: 基于 flash-linear-attention(FLA)的 Triton/CUDA 编译算子 优势:
- 运行速度更快
- 内存占用更低
- 延迟更小
- 适用场景:正式训练/推理环境
2、备选方案:PyTorch 参考版本
- 示例算子:
torch_causal_conv1d_update、torch_chunk_gated_delta_rule、torch_recurrent_gated_delta_rule - 特性: 纯 PyTorch 实现(慢速回退方案) 特点:
- 保持计算逻辑完全一致
- 执行效率较低(缺乏并行优化)
- 适用场景:
- CPU 环境
- 不支持 Triton 的环境
- 调试环境
3、实现策略总结: 系统提供两套实现方案
- 高性能 Triton/CUDA 内核
- PyTorch 参考实现 运行时自动选择:优先采用高性能版本,若不可用则回退至 PyTorch 版本。两个版本保持严格的计算等价性,仅存在性能差异。
三、forward 函数
python
def forward(
self,
hidden_states: torch.Tensor,
cache_params: Optional[Qwen3NextDynamicCache] = None,
cache_position: Optional[torch.LongTensor] = None,
attention_mask: Optional[torch.Tensor] = None,
):
hidden_states = apply_mask_to_padding_states(hidden_states, attention_mask)
# Set up dimensions for reshapes later
batch_size, seq_len, _ = hidden_states.shape
use_precomputed_states = (
cache_params is not None
and cache_params.has_previous_state
and seq_len == 1
and cache_position is not None
)
# getting projected states from cache if it exists
if cache_params is not None:
conv_state = cache_params.conv_states[self.layer_idx]
recurrent_state = cache_params.recurrent_states[self.layer_idx]apply_mask_to_padding_states 函数说明:
该函数用于将 padding token 对应的隐藏状态置零,有效防止这些填充标记在后续的线性递归或卷积运算中产生干扰。若不进行清零处理,这些填充标记的隐藏状态会参与卷积/递归/线性计算,导致模型状态受到污染。通过清零操作,可以确保这些填充标记被视为"无效标记"。
该函数解决了 Mamba 类模型中已知的问题(issue #66)。
python
projected_states_qkvz = self.in_proj_qkvz(hidden_states)
projected_states_ba = self.in_proj_ba(hidden_states)
query, key, value, z, b, a = self.fix_query_key_value_ordering(projected_states_qkvz, projected_states_ba)
query, key, value = (x.reshape(x.shape[0], x.shape[1], -1) for x in (query, key, value))这段代码首先通过线性变换将 hidden_states 投影为混合向量,随后使用 fix_query_key_value_ordering 将其分解为 Q/K/V/Z 和门控参数 b/a,最终将 Q/K/V 展平为单头维度以供后续计算使用。
fix_query_key_value_ordering 函数:
该函数负责将模型混合投影输出的向量序列重新组织,拆分为结构化的多头 Q、K、V、Z 矩阵及其对应的门控参数 b 和 a,以便后续进行注意力机制和线性递归计算。
python
mixed_qkv = torch.cat((query, key, value), dim=-1)
mixed_qkv = mixed_qkv.transpose(1, 2)
if use_precomputed_states:
# 2. Convolution sequence transformation
# NOTE: the conv state is updated in `causal_conv1d_update`
mixed_qkv = self.causal_conv1d_update(
mixed_qkv,
conv_state,
self.conv1d.weight.squeeze(1),
self.conv1d.bias,
self.activation,
)
else:
if cache_params is not None:
conv_state = F.pad(mixed_qkv, (self.conv_kernel_size - mixed_qkv.shape[-1], 0))
cache_params.conv_states[self.layer_idx] = conv_state
if self.causal_conv1d_fn is not None:
mixed_qkv = self.causal_conv1d_fn(
x=mixed_qkv,
weight=self.conv1d.weight.squeeze(1),
bias=self.conv1d.bias,
activation=self.activation,
seq_idx=None,
)
else:
mixed_qkv = F.silu(self.conv1d(mixed_qkv)[:, :, :seq_len])
mixed_qkv = mixed_qkv.transpose(1, 2)该代码通过拼接 Q/K/V 并应用深度因果卷积(causal depthwise conv1d)实现时序特征变换,同时支持两种处理模式:
- 推理时增量更新(causal_conv1d_update)
- 训练时整序列处理(causal_conv1d_fn)
作为 Qwen3-Next 的核心设计,该方法用线性卷积替代了部分注意力机制的混合功能。具体实现步骤如下:
- Q/K/V 拼接
输入维度:
text
query: [b, s, key_dim]
key: [b, s, key_dim]
value: [b, s, value_dim]拼接后维度变为:
text
mixed_qkv: [b, s, key_dim*2 + value_dim]- 维度转换
为适配 Conv1d 输入格式 b, channels, seq_len,将 mixed_qkv 转换为:
text
[b, c, s] 其中 c = key_dim*2 + value_dim- 卷积处理
根据场景采用不同处理方式:
- (A)推理模式 :使用增量状态更新(
详见 3.1 节 causal_conv1d_update) - (B)训练模式 / 全序列模式 :(
详见 3.2 节 causal_conv1d_fn)- 存储 conv_state(用于推理缓存)
- 使用 fused CUDA 版本的 causal conv
- 退化方案:PyTorch 普通卷积 + SiLU
| 模式 | 使用的算子 | 场景 |
|---|---|---|
| 训练 / 全序列推理 | causal_conv1d_fn | 一次处理整个序列 |
| 增量推理(token by token) | causal_conv1d_update | 推理,每次只处理新 token |
- 输出转换
最终将结果转回原始格式 b, s, c
3.1 和 3.2 节中的算子高性能实现代码源自:causal-conv1d 库
3.1 算子 - causal_conv1d_update - 增量更新卷积(推理模式)
torch_causal_conv1d_update
在现代大模型(LLM)如 Qwen3-next、Llama3、GPT-4.x 的架构设计中,卷积(Convolution)正在重新登场 。与传统 ResNet 中的大卷积不同,LLM 中的卷积更轻量、更局部、更高效,目的是补足 Transformer 的局部建模能力,并进一步提升推理速度。
python
def torch_causal_conv1d_update(
hidden_states,
conv_state,
weight,
bias=None,
activation=None,
):
_, hidden_size, seq_len = hidden_states.shape
state_len = conv_state.shape[-1]
hidden_states_new = torch.cat([conv_state, hidden_states], dim=-1).to(weight.dtype)
conv_state.copy_(hidden_states_new[:, :, -state_len:])
out = F.conv1d(hidden_states_new, weight.unsqueeze(1), bias, padding=0, groups=hidden_size)
out = F.silu(out[:, :, -seq_len:])
out = out.to(hidden_states.dtype)
return out简单讲,这段函数实现了:一种可用于增量推理(逐 token 推理)的因果卷积更新机制。
普通卷积需要一次性处理整个序列;而增量推理要求:
- 输入 token 是逐步到来的
- 不能重复计算整个历史
- 必须保证"因果性"(不能看到未来)
因此需要一个专门的机制将卷积的历史状态保存下来 ,这就是: conv_state(卷积缓存)
通过它,模型在生成每一个 token 时仅需计算一次卷积,而不必扫描全部历史。
① 获取输入维度
python
_, hidden_size, seq_len = hidden_states.shape
state_len = conv_state.shape[-1]hidden_states: 当前步新输入的 tokens 的隐层表示conv_state: 卷积需要的历史缓存(长度 = 卷积核大小 - 1)
② 拼接历史 + 新输入
python
hidden_states_new = torch.cat([conv_state, hidden_states], dim=-1)卷积核若大小为 K,那么当前要卷积的位置必须能看到: 当前 token、前 K-1 个历史 token,这些历史内容由 conv_state 提供,因此必须拼接。
③ 更新 conv_state(关键)
python
conv_state.copy_(hidden_states_new[:, :, -state_len:])这一步保证: 下次卷积时能继续使用这次序列的"尾部"、conv_state 长度固定,不会随序列增长,最终让卷积推理的复杂度变成 O(1)。
④ 执行 depthwise 1D 卷积
python
out = F.conv1d(
hidden_states_new,
weight.unsqueeze(1),
bias,
padding=0,
groups=hidden_size,
)这是 逐通道卷积(depthwise convolution): 每个 channel 单独卷积、更轻量、更快、更适合局部特征提取。
⑤ 只保留当前输入对应的输出
python
out = out[:, :, -seq_len:]在拼接了 conv_state + hidden_states 后卷积会产生更长的输出,但仅最后一段是我们需要的。
⑥ 激活 + dtype 转换
python
out = F.silu(out)
out = out.to(hidden_states.dtype)动图式理解:因果卷积如何滑动?
下面用 ASCII 演示一个 kernel size=4 的因果卷积是如何滑动的:
Step 1:输入 t1
窗口: [?,?,?,t1] → out1前 3 个位置由 conv_state 提供。
Step 2:输入 t2
窗口: [?,?,t1,t2] → out2Step 3:输入 t3
窗口: [?,t1,t2,t3] → out3Step 4:输入 t4
窗口: [t1,t2,t3,t4] → out4卷积窗口完全铺满,能正常滑动。
Step 5:输入 t5
窗口: [t2,t3,t4,t5] → out5每次滑动 1 格。 conv_state 保存了窗口的前 K-1 个位置。
这就是增量卷积的精髓:无需重复计算整个序列,只需依赖短暂的卷积状态。
Qwen3-next 为什么要引入卷积?
总结成 5 个核心原因:
① Transformer 在局部模式建模上有弱点,卷积可以补强
Attention 对长距离依赖很强,但对局部结构不够敏感。
卷积的专长就是:提取局部模式、利用固定大小的感受野、识别移动不变的结构,因此两者非常互补。
② 卷积比注意力更便宜(O(n) vs O(n²))
在高效模型中(如 Qwen3、RWKV、Hyena),卷积都是提升吞吐与速度的利器。
③ 卷积具备"平移不变性"
即:不论模式出现在哪里,卷积都能识别出来。
这特别适用于 NLP 中的:固定短语、Byte-level pattern、边界相关模式。
④ 卷积增强 token-to-token 信息流
Transformer 的 MLP 层是 逐 token 运算(pointwise),看不到邻居 token。
加入卷积后:MLP → 具备局部感知能力的 MLP。训练更稳定,表现更好。
⑤ 卷积非常适合增量推理(Streaming)
只需要保存:KV Cache(注意力历史)、Conv Cache(卷积历史)。
即可做到:每生成一个 token,都只计算 O(1) 成本。
这正是 Qwen3-next 推理能如此高效的原因。
3.2 算子 - causal_conv1d_fn - 全序列因果卷积(训练模式)
高性能版本的简要介绍
1. 输入格式
x: [batch_size, channels, sequence_length]
weight: [channels, kernel_size]
bias: [channels] 或 None
activation: 可调用激活函数(如 SiLU)
seq_idx: None 或用于分块的序列索引2. 输出格式
输出张量: [batch_size, channels, sequence_length]3. 核心原理(类似标准卷积,但严格保持时序因果性)
以 kernel_size = 3 为例:
输出 yt 的计算公式:
y[t] = weight[0] * x[t] + weight[1] * x[t-1] + weight[2] * x[t-2]关键说明:
- 当 t-1 < 0 时,输入值视为 0
- 深度可分离:每个通道使用独立的卷积核
- 因果性约束:禁止使用未来时刻的输入 xt+1
核心特性:
卷积窗口严格限制在过去时间方向这正是"因果卷积(causal conv)"的本质特征。
4. 功能优势
- 训练时可对整个序列执行高效并行卷积
- 通过 CUDA 融合内核实现加速
- 支持基于分块的流式处理
3.3 causal_conv1d_fn 和 causal_conv1d_update 的区别总结
| 特性 | causal_conv1d_fn | causal_conv1d_update |
|---|---|---|
| 输入 | 整个序列 xb,c,s | 单 token xb,c,1 |
| 输出 | 整个卷积结果 | 当前 token 的卷积输出 |
| 速度 | 训练时最快(CUDA fused) | 推理时最快(O(1) update) |
| 状态 | 不需要 | 需要维护 conv_state |
| 用途 | 训练 / 批量推理 | 增量推理(LLM decode) |
它们是 同一个数学操作的两个优化实现。
causal_conv1d_fn :一次性对整条序列做因果卷积(训练用),实现 depthwise causal 1D convolution 的全序列并行形式 。
causal_conv1d_update :像 RNN 一样只更新下一步卷积结果(推理用),实现该卷积的递推形式,使推理复杂度从 O(nk) 降至 O(k)。
继续 forward 函数:
python
query, key, value = torch.split(
mixed_qkv,
[
self.key_dim,
self.key_dim,
self.value_dim,
],
dim=-1,
)
# query.shape = [B, T, num_k_heads, head_k_dim]
# key.shape = [B, T, num_k_heads, head_k_dim]
# value.shape = [B, T, num_v_heads, head_v_dim]
# B = batch T = token 个数(模型看到的序列长度)注意:这里的 T 遵循因果性约束
query = query.reshape(query.shape[0], query.shape[1], -1, self.head_k_dim)
key = key.reshape(key.shape[0], key.shape[1], -1, self.head_k_dim)
value = value.reshape(value.shape[0], value.shape[1], -1, self.head_v_dim)
beta = b.sigmoid()
# If the model is loaded in fp16, without the .float() here, A might be -inf
g = -self.A_log.float().exp() * F.softplus(a.float() + self.dt_bias)
...这段代码从 QKV 的线性投影结果中分离出 query/key/value,并将 Q/K/V 重塑为多头格式 (num_heads, head_dim),支持 K-head 和 V-head 数量不一致。同时计算 Linear Attention 的核心门控参数 β(gate)和衰减因子 g(decay factor)。
在 Qwen3-Next 的 Attention 状态递推中,数学公式表示为:
S t = α t S t − 1 + β t ( v t − α t S t − 1 k t ) k t ⊤ S_t = \alpha_t S_{t-1} + \beta_t (v_t - \alpha_t S_{t-1}k_t) k_t^\top St=αtSt−1+βt(vt−αtSt−1kt)kt⊤
这是 Gated ΔAttention 的标准形式,具有以下特性:
- 线性计算复杂度(O(T))
- 可递推性(仅依赖 Sₜ₋₁)
- 保持因果性(无需 causal mask)
参数对应关系:
- β(门控参数)
对应公式中的 β t \beta_t βt ,代码实现:beta = b.sigmoid(),作为每个时间步 t 的 input gate:
- 控制当前 key/value 信息的加入比例
- β=0 表示完全忽略当前 token
- β=1 表示完全信任当前 KV
- g(衰减因子)
对应公式中的 α t \alpha_t αt ,代码实现:g = -self.A_log.float().exp() * F.softplus(a.float() + self.dt_bias),经过exp(-g)处理后得到 α t = e − g t \alpha_t = e^{-g_t} αt=e−gt:
- 控制历史状态 Sₜ₋₁ 的衰减程度
- 决定记忆保留比例
- 由
A_log和dt(通过softplus(a + dt_bias))共同决定连续时间系统的离散化因子
参数对应关系总结:
| 数学符号 | 代码变量 | 功能描述 |
|---|---|---|
| β t \beta_t βt | beta |
输入门控(调节当前token信息吸收量) |
| α t \alpha_t αt | exp(-g) |
衰减因子(控制历史记忆保留程度) |
继续 forward 函数:
python
if not use_precomputed_states:
core_attn_out, last_recurrent_state = self.chunk_gated_delta_rule(
query,
key,
value,
g=g,
beta=beta,
initial_state=None,
output_final_state=cache_params is not None,
use_qk_l2norm_in_kernel=True,
)
else:
core_attn_out, last_recurrent_state = self.recurrent_gated_delta_rule(
query,
key,
value,
g=g,
beta=beta,
initial_state=recurrent_state,
output_final_state=cache_params is not None,
use_qk_l2norm_in_kernel=True,
)
# Update cache
if cache_params is not None:
cache_params.recurrent_states[self.layer_idx] = last_recurrent_state
z_shape_og = z.shape
# reshape input data into 2D tensor
core_attn_out = core_attn_out.reshape(-1, core_attn_out.shape[-1])
z = z.reshape(-1, z.shape[-1])
core_attn_out = self.norm(core_attn_out, z)
core_attn_out = core_attn_out.reshape(z_shape_og)
core_attn_out = core_attn_out.reshape(core_attn_out.shape[0], core_attn_out.shape[1], -1)
output = self.out_proj(core_attn_out)
return output这段代码的核心计算流程:
- 调用 ΔAttention 更新规则
- chunk 模式:整序列处理(训练场景)
- recurrent 模式:单 token 增量处理(推理场景)
- 得到线性注意力输出(core_attn_out)和 ΔAttention 状态 Sₜ(缓存用)(last_recurrent_state)
- 更新 KV 状态缓存(用于文本生成)
- 对输出执行 Norm(注意力归一化:Qwen3NextRMSNormGated / FusedRMSNormGated)
- 投影到输出维度(out_proj)
在 FLA(flash-linear-attention)框架中,3.4 和 3.5 章节所对应的原始算子实现可在 FLA 库 中找到。
3.4 算子 - chunk_gated_delta_rule
3.4.1 代码
FLA(flash-linear-attention)的 chunk 实现并不是完整的 DeltaAttention,而是 DeltaAttention 的 分块并行化计算的中间步骤。最终归一化是在 Qwen3-Next 的 Attention 层里做的,不在 chunk kernel 内部做。
python
def torch_chunk_gated_delta_rule(
query,
key,
value,
g,
beta,
chunk_size=64,
initial_state=None,
output_final_state=False,
use_qk_l2norm_in_kernel=False,
):
initial_dtype = query.dtype
if use_qk_l2norm_in_kernel:
query = l2norm(query, dim=-1, eps=1e-6)
key = l2norm(key, dim=-1, eps=1e-6)
query, key, value, beta, g = [
x.transpose(1, 2).contiguous().to(torch.float32) for x in (query, key, value, beta, g)
]
batch_size, num_heads, sequence_length, k_head_dim = key.shape
v_head_dim = value.shape[-1]
pad_size = (chunk_size - sequence_length % chunk_size) % chunk_size
query = F.pad(query, (0, 0, 0, pad_size))
key = F.pad(key, (0, 0, 0, pad_size))
value = F.pad(value, (0, 0, 0, pad_size))
beta = F.pad(beta, (0, pad_size))
g = F.pad(g, (0, pad_size))
total_sequence_length = sequence_length + pad_size
scale = 1 / (query.shape[-1] ** 0.5)
query = query * scale
v_beta = value * beta.unsqueeze(-1)
k_beta = key * beta.unsqueeze(-1)
# reshape to chunks
query, key, value, k_beta, v_beta = [
x.reshape(x.shape[0], x.shape[1], -1, chunk_size, x.shape[-1]) for x in (query, key, value, k_beta, v_beta)
]
g = g.reshape(g.shape[0], g.shape[1], -1, chunk_size)
mask = torch.triu(torch.ones(chunk_size, chunk_size, dtype=torch.bool, device=query.device), diagonal=0)
# chunk decay
g = g.cumsum(dim=-1)
decay_mask = ((g.unsqueeze(-1) - g.unsqueeze(-2)).tril().exp().float()).tril()
attn = -((k_beta @ key.transpose(-1, -2)) * decay_mask).masked_fill(mask, 0)
for i in range(1, chunk_size):
row = attn[..., i, :i].clone()
sub = attn[..., :i, :i].clone()
attn[..., i, :i] = row + (row.unsqueeze(-1) * sub).sum(-2)
attn = attn + torch.eye(chunk_size, dtype=attn.dtype, device=attn.device)
value = attn @ v_beta
k_cumdecay = attn @ (k_beta * g.exp().unsqueeze(-1))
last_recurrent_state = (
torch.zeros(batch_size, num_heads, k_head_dim, v_head_dim).to(value)
if initial_state is None
else initial_state.to(value)
)
core_attn_out = torch.zeros_like(value)
mask = torch.triu(torch.ones(chunk_size, chunk_size, dtype=torch.bool, device=query.device), diagonal=1)
# for each chunk
for i in range(0, total_sequence_length // chunk_size):
q_i, k_i, v_i = query[:, :, i], key[:, :, i], value[:, :, i]
attn = (q_i @ k_i.transpose(-1, -2) * decay_mask[:, :, i]).masked_fill_(mask, 0)
v_prime = (k_cumdecay[:, :, i]) @ last_recurrent_state
v_new = v_i - v_prime
attn_inter = (q_i * g[:, :, i, :, None].exp()) @ last_recurrent_state
core_attn_out[:, :, i] = attn_inter + attn @ v_new
last_recurrent_state = (
last_recurrent_state * g[:, :, i, -1, None, None].exp()
+ (k_i * (g[:, :, i, -1, None] - g[:, :, i]).exp()[..., None]).transpose(-1, -2) @ v_new
)
if not output_final_state:
last_recurrent_state = None
core_attn_out = core_attn_out.reshape(core_attn_out.shape[0], core_attn_out.shape[1], -1, core_attn_out.shape[-1])
core_attn_out = core_attn_out[:, :, :sequence_length]
core_attn_out = core_attn_out.transpose(1, 2).contiguous().to(initial_dtype)
return core_attn_out, last_recurrent_state3.4.2 总体功能概览
该函数实现了一种分块(chunk)、门控(gated)、delta rule 累积记忆型注意力机制,类似于某些 RNN + Attention 混合结构(如 DeltaNet / RWKV / Gated Delta Networks 家族),通过:
- 将 Q,K,V 分块,减少全局注意力的复杂度
- 添加 g(门控衰减因子)+ β(重要性权重)
- 基于 delta rule 更新递归状态
- 在 chunk 内本地并行,在 chunk 间递归更新状态
最终输出一种高效近似注意力效果。
3.4.3 源码逐行分析
函数签名
python
def torch_chunk_gated_delta_rule(
query,
key,
value,
g,
beta,
chunk_size=64,
initial_state=None,
output_final_state=False,
use_qk_l2norm_in_kernel=False,
):定义一个函数,输入 Q,K,V 和门控参数 g, β,并按 chunk 计算 gated delta-rule attention。
数据预处理
python
initial_dtype = query.dtype记录原始 dtype,最后会把输出转换回去。
可选:对 Q/K 做 L2 归一化
python
if use_qk_l2norm_in_kernel:
query = l2norm(query, dim=-1, eps=1e-6)
key = l2norm(key, dim=-1, eps=1e-6)如果指定,则将 Q 与 K 每个向量归一化成 unit vector(常用于 Kernelized Attention)。
维度转置成 (B, H, L, D) 并转换为 float32
python
query, key, value, beta, g = [
x.transpose(1, 2).contiguous().to(torch.float32) for x in (query, key, value, beta, g)
]如果原 shape 是 (B, L, H, D),转换为 (B, H, L, D)。beta,g 也 reshape 成 (B, H, L)。
保存基本形状
python
batch_size, num_heads, sequence_length, k_head_dim = key.shape
v_head_dim = value.shape[-1]- K 的最后维度就是 key 维度
- V 的最后维度是 value 维度
Padding 使 sequence 能被 chunk_size 整除
python
pad_size = (chunk_size - sequence_length % chunk_size) % chunk_size计算需要 pad 的 token 数。
python
query = F.pad(query, (0, 0, 0, pad_size))
key = F.pad(key, (0, 0, 0, pad_size))
value = F.pad(value, (0, 0, 0, pad_size))
beta = F.pad(beta, (0, pad_size))
g = F.pad(g, (0, pad_size))后面 reshape 每 chunk 等长时需要 pad,得到实际分块长度。
python
total_sequence_length = sequence_length + pad_size缩放 Query
python
scale = 1 / (query.shape[-1] ** 0.5)
query = query * scale标准 attention 缩放法:1/sqrt(d_k)。
计算 V⋅β 与 K⋅β
python
v_beta = value * beta.unsqueeze(-1)
k_beta = key * beta.unsqueeze(-1)把 β 当作权重,按 token 逐点缩放 Value / Key。β 控制 token 的"重要性"。
按 chunk 切分
python
query, key, value, k_beta, v_beta = [
x.reshape(x.shape[0], x.shape[1], -1, chunk_size, x.shape[-1]) for x in (query, key, value, k_beta, v_beta)
]现在每个张量变成:形状是 (B, H, num_chunks, chunk_size, D)
对 g 分块
python
g = g.reshape(g.shape[0], g.shape[1], -1, chunk_size)构造 chunk 内上三角 mask
python
mask = torch.triu(torch.ones(chunk_size, chunk_size, dtype=torch.bool, device=query.device), diagonal=0)g 的累积和(表示 decay 累积)
python
g = g.cumsum(dim=-1)g 原本是 per-token 门控衰减值(负数)cumsum 之后用于构建指数衰减。
构造 chunk 内所有 token 两两之间的 decay mask
python
decay_mask = ((g.unsqueeze(-1) - g.unsqueeze(-2)).tril().exp().float()).tril()形状:(B, H, num_chunks, chunk_size, chunk_size)
含义:
g[i] - g[j]表示 token i → token j 的累计衰减- 只取下三角(只能看过去)
- exp 后得到 decay(越远衰减越大)
计算 chunk 内自注意力矩阵
python
attn = -((k_beta @ key.transpose(-1, -2)) * decay_mask).masked_fill(mask, 0)步骤含义:
k_beta @ key^T:类似 attention score(但并不完全是 QK^T)- 乘 decay_mask,加入时间衰减
- 取负号(说明这是某种 kernel-based 累积)
- masked_fill 用 mask 清理未来 token(上三角)
对 chunk 内的 attention 做一个累积增强
python
for i in range(1, chunk_size):
row = attn[..., i, :i].clone()
sub = attn[..., :i, :i].clone()
attn[..., i, :i] = row + (row.unsqueeze(-1) * sub).sum(-2)这段逻辑是 delta-rule 的核心:
- 逐行递归增强
- 类似
row += row * sub的累积 - 这本质模拟 RNN-style recurrence in parallel
把对角线加 1 使矩阵可逆/稳定
python
attn = attn + torch.eye(chunk_size, dtype=attn.dtype, device=attn.device)应用注意力到 v_beta
python
value = attn @ v_beta得到 chunk 内加权的 value。
用衰减过的 key 构造一个"累积记忆项"
python
k_cumdecay = attn @ (k_beta * g.exp().unsqueeze(-1))这个项将在 chunk 之间递归更新。
初始递归状态
python
last_recurrent_state = (
torch.zeros(batch_size, num_heads, k_head_dim, v_head_dim).to(value)
if initial_state is None
else initial_state.to(value)
)last_recurrent_state 的形状是 (B, H, D_k, D_v)
表示跨 chunk 的记忆矩阵(类似 RNN 的 hidden state)。
core_attn_out 结果初始化
python
core_attn_out = torch.zeros_like(value)mask
python
mask = torch.triu(torch.ones(chunk_size, chunk_size, dtype=torch.bool, device=query.device), diagonal=1)跨 chunk 的递归(核心 RNN-like 更新)
python
for i in range(0, total_sequence_length // chunk_size):逐 chunk 处理。
取 chunk i 的 Q, K, V
python
q_i, k_i, v_i = query[:, :, i], key[:, :, i], value[:, :, i]计算 chunk 内 attention(包含 decay)
python
attn = (q_i @ k_i.transpose(-1, -2) * decay_mask[:, :, i]).masked_fill_(mask, 0)这是 QK^T * decay masking。
delta-rule 记忆预测值
python
v_prime = (k_cumdecay[:, :, i]) @ last_recurrent_state用递归状态预测当前 chunk 的 v。
v_new = 当前真实值 - 预测值(误差项)
python
v_new = v_i - v_primedelta-rule 的核心:用预测误差来更新状态。
q_i 通过门控衰减作用于记忆
python
attn_inter = (q_i * g[:, :, i, :, None].exp()) @ last_recurrent_state最终输出 chunk attention
python
core_attn_out[:, :, i] = attn_inter + attn @ v_new输出 =
- recurrence-based term(attn_inter)
- delta-based correction(attn @ v_new)
更新跨 chunk 的递归状态
python
last_recurrent_state = (
last_recurrent_state * g[:, :, i, -1, None, None].exp()
+ (k_i * (g[:, :, i, -1, None] - g[:, :, i]).exp()[..., None]).transpose(-1, -2) @ v_new
)分两部分:
last_state * decay------ 旧记忆衰减k_i * exp(delta g) @ v_new------ 新信息按 delta-rule 替换/更新
如果不输出 final state,则置为 None
python
if not output_final_state:
last_recurrent_state = None恢复到原来的 (B, L, H, D) 格式
python
core_attn_out = core_attn_out.reshape(core_attn_out.shape[0], core_attn_out.shape[1], -1, core_attn_out.shape[-1])
core_attn_out = core_attn_out[:, :, :sequence_length]
core_attn_out = core_attn_out.transpose(1, 2).contiguous().to(initial_dtype)最终返回
python
return core_attn_out, last_recurrent_state总结(核心概念)
| 功能 | 描述 |
|---|---|
| chunking | 将长序列拆成 chunk,每段内部并行计算 |
| g(门控衰减) | 控制 token 之间的信息流衰减 |
| β(重要性权重) | 对 K/V 进行缩放,类似 attention mask |
| delta rule | v_new = v_real - v_pred,用误差更新递归状态 |
| 递归状态(跨 chunk) | 类似 RNN hidden state,存储长期依赖 |
| 并行 + 递归混合 | chunk 内并行,chunk 间递归 |
这是一个非常高效但复杂的 RNN+Attention 混合结构。
3.4.4 两个 mask 矩阵
关于代码中的两个 mask 矩阵,需要明确:
它们不属于注意力机制范畴,而是线性代数求解的技巧性设计。要理解 DeltaAttention(Qwen3-Next)作为"线性注意力"的关键在于:
问题核心 :既然线性注意力不需要显式因果 mask,为何torch_chunk_gated_delta_rule中会出现torch.triu()这样的"因果矩阵"?这看似矛盾。
本质 :这段代码中的 mask 并非"注意力因果矩阵",而是 chunk 扫描(block-scan)为实现并行结构必须引入的"计算图约束 mask",与 softmax/transformer 中的因果 mask 概念完全不同。
mask 的真实用途 :确保 (I - A) S = B 这个线性系统成为严格下三角结构,从而可通过 prefix-scan(并行)求解递推关系。具体而言:
- 强制矩阵 A 成为"严格下三角矩阵"
- 实现三个目标:
- 高效求逆
- 可分块并行计算
- 防止块内递推时信息泄漏到未来块
关键区分:这是"线性代数结构 mask",而非 attention mask。
为何需要块下三角结构?
DeltaAttention 的递推方程:
S t = α t S t − 1 + v t k t ⊤ S_t = \alpha_t S_{t-1} + v_t k_t^\top St=αtSt−1+vtkt⊤
本质是时间递推(RNN),无法直接并行。
FLA(flash-linear-attention)的解决方案:
将递推转化为块内线性系统求解:(I - A)S = B
其中 A 设计为下三角矩阵:
[1 0 0 0]
[a 1 0 0]
[b c 1 0]
[d e f 1]为实现严格下三角特性,需要:
python
mask = torch.triu(..., diagonal=0)
attn = attn.masked_fill(mask, 0)核心目的 :确保矩阵可逆性 & 可并行化,而非实现因果性。
三角形状的数学意义:
- 下三角矩阵 A ⇒ (I - A) 可并行求逆
- 其幂 A², A³ 在有限步内归零(A 具有幂零性/nilpotent)
- 可表示为有限前缀和:
( I − A ) − 1 = I + A + A 2 + A 3 + ... (I-A)^{-1} = I + A + A^2 + A^3 + \dots (I−A)−1=I+A+A2+A3+...
这正是 FLA 采用 GPU 并行 block-scan 算法的数学基础。
关键结论 :
此 mask 的实质功能:
| 功能 | 类型 |
|---|---|
| 约束矩阵 A 结构 | 线性代数结构性 mask |
| 确保并行可计算性 | block-scan mask |
| 维持严格下三角特性 | 数学条件 |
| 实现 ΔAttention 高效并行 | 工程优化 |
最终定义 :
此 mask 是"块内递推方程并行求解所需的下三角强制掩码",属于线性代数求解技巧,与注意力机制无关。
3.4.5 chunk 的并行技术
ΔAttention(Delta Rule)本质上是一个"像 RNN 一样"的递推结构,天然不能并行,但 FLA(flash-linear-attention)的 chunk 技术,把原来必须逐步计算的递推变成了可以在一个"块内部"并行计算的形式。
1、chunk_gated_delta_rule 计算的是未归一化的分子 ( S t q t ) (S_t q_t) (Stqt)
它不计算 softmax、也不计算归一化项 ( Z t Z_t Zt)。
因为 chunk 算子只负责计算 Delta Attention 的"记忆状态 S t S_t St" 。
S t S_t St 是 softmax attention 中的"分子部分",但是 softmax attention 的最终输出还需要分母(归一化):
o t = S t q t Z t q t o_t = \frac{S_t q_t}{Z_t q_t} ot=ZtqtStqt
chunk 算子只是 operator,不负责完整注意力逻辑。
Z t Z_t Zt 是在 Qwen3-Next Attention 层里计算的,不是在算子内部。
chunk 内做的事: 只算 ( S t q t S_t q_t Stqt)、 不算 ( Z t Z_t Zt)、不算归一化(softmax-like 分母)。
2、chunk 内不在计算注意力,而是求解 ΔAttention 的线性系统表示 (I - A)⁻¹
它是在解递推,不是在算注意力,是为了 把 RNN-式递推 S t = f ( S t − 1 , x t ) S_t = f(S_{t-1}, x_t) St=f(St−1,xt) 改写成可并行处理的形式。
ΔAttention 原始递推形式:
S t = α t S t − 1 + β t k t ( v t − S t − 1 k t ) ⊤ S_t = \alpha_t S_{t-1} + \beta_t k_t(v_t - S_{t-1}k_t)^\top St=αtSt−1+βtkt(vt−St−1kt)⊤
这是 严格顺序依赖 的:
必须先算 S₁,再算 S₂,再算 S₃......
chunk 技术做的事:
把多个时间步组合成一个线性系统:
S c h u n k = ( I − A ) − 1 B S_{chunk} = (I - A)^{-1} B Schunk=(I−A)−1B
这样就能:
- chunk 内 并行地 得到多个 S t S_t St
- chunk 间保持顺序
关键理解:
chunk 内看见的 mask、下三角矩阵、A 矩阵,不是注意力权重,而是用于"数值求解递推"的中间结构。
它们只是为了让 ΔAttention 能够并行。
3、虽然 chunk 内可以并行,但 chunk 与 chunk 之间仍然严格按时间顺序递推
块内可以并行,不代表整个序列并行。
chunk 内: 把 64 个 token 一起求解、是数学意义上的 局部求解 。
chunk 间: 必须按顺序更新 S t S_t St、因为 S t + 1 S_{t+1} St+1 依赖 S t S_t St、 S t S_t St 是注意力状态本质(像 RNN hidden state)、完整因果结构仍然保持。
图示:
Chunk 0 → Chunk 1 → Chunk 2 → ...
↓ ↓ ↓
S_64 S_128 S_192 ...(顺序递推)3.4.6 chunk 的并行技术原理解析
1、通俗易懂解析:
"递推"不能并行,但"求解递推方程"可以并行
普通递推:
S1 = f(S0, x1)
S2 = f(S1, x2)
S3 = f(S2, x3)
...只能一个接一个算,因此是串行。
但 FLA 不是像这样直接算,而是:
把整个"块"的递推结构 改写成一个线性代数问题:解一个下三角线性方程组。
例如 4 个 token 的递推:
S0 → S1 → S2 → S3 → S4被改写成:
(I - A) * S = B其中 A 是下三角矩阵 (未来依赖过去 → 因果结构),这样的线性系统 可以一次性并行求解(block-scan)。
2、专业解析:
DeltaAttention 的核心更新式:
S t = α t S t − 1 + β t k t ( v t − S t − 1 k t ) ⊤ S_t = \alpha_t S_{t-1} + \beta_t k_t (v_t - S_{t-1}k_t)^\top St=αtSt−1+βtkt(vt−St−1kt)⊤
这是一个 线性-外积形式 的更新。
展开可得到:整体结构是前缀和(prefix-sum)形式:Sₜ = ∑贡献(i→t),(这种结构天然是结合律友好的)
也就是说:
( S 3 = S 2 + C 3 ) , ( S 2 = S 1 + C 2 ) , ( S 1 = S 0 + C 1 ) (S_3 = S_2 + C_3), \quad (S_2 = S_1 + C_2), \quad (S_1 = S_0 + C_1) (S3=S2+C3),(S2=S1+C2),(S1=S0+C1)
可以变成:
S 3 = S 0 + C 1 + C 2 + C 3 S_3 = S_0 + C_1 + C_2 + C_3 S3=S0+C1+C2+C3
前缀和满足结合律,因此可以并行。
chunk 内矩阵 A 是什么?
FLA 构造的 A 是:
A i j = { − β j k j ⊤ k i ⋅ α i : j , j < i 0 , j ≥ i A_{ij} = \begin{cases} -\beta_j \, \boldsymbol{k}_j^\top \boldsymbol{k}i \cdot \alpha{i:j}, & j < i \\ 0, & j \ge i \end{cases} Aij={−βjkj⊤ki⋅αi:j,0,j<ij≥i
即 A 是严格下三角。
于是:
S = ( I − A ) − 1 B S = (I - A)^{-1} B S=(I−A)−1B
而下三角的线性系统 可以通过 parallel scan 求解:
(I - A)⁻¹ = I + A + A² + A³ + ...因为 A 是下三角且满足 Aᵏ = 0 (当 k > chunk_size),这是一个有限级数。
prefix-scan 正好可以并行地计算:
I + A + A² + ...这与 GPU 完美契合。
3.4.7 总结:
-
ΔAttention(Delta Rule)本质上是一个"像 RNN 一样"的递推结构,天然不能并行,但 FLA(flash-linear-attention)的 chunk 技术,把原来必须逐步计算的递推变成了可以在一个"块内部"并行计算的形式。
-
chunk operator 不是注意力,是 DeltaAttention 的并行化求解器:它算出未归一化的记忆态 ( S t S_t St),而完整注意力(含归一化)在 Qwen3-Next 的 Attention 层里完成。
-
chunk 本质上不是直接并行递推,而是把递推结构转化成一个"可并行求解的数学形式"(递推本来不能并行,但 ΔAttention 的特殊结构让递推可以改写为"前缀和",前缀和可以并行求解,因此 chunk 可以并行。)。 这样全局看仍是递推,本地块内变成可并行。
3.5 算子 - fused_recurrent_gated_delta_rule
torch_recurrent_gated_delta_rule
python
def torch_recurrent_gated_delta_rule(
query, key, value, g, beta, initial_state, output_final_state, use_qk_l2norm_in_kernel=False
):
initial_dtype = query.dtype
if use_qk_l2norm_in_kernel:
query = l2norm(query, dim=-1, eps=1e-6)
key = l2norm(key, dim=-1, eps=1e-6)
query, key, value, beta, g = [
x.transpose(1, 2).contiguous().to(torch.float32) for x in (query, key, value, beta, g)
]
batch_size, num_heads, sequence_length, k_head_dim = key.shape
v_head_dim = value.shape[-1]
scale = 1 / (query.shape[-1] ** 0.5)
query = query * scale
core_attn_out = torch.zeros(batch_size, num_heads, sequence_length, v_head_dim).to(value)
last_recurrent_state = (
torch.zeros(batch_size, num_heads, k_head_dim, v_head_dim).to(value)
if initial_state is None
else initial_state.to(value)
)
for i in range(sequence_length):
q_t = query[:, :, i]
k_t = key[:, :, i]
v_t = value[:, :, i]
g_t = g[:, :, i].exp().unsqueeze(-1).unsqueeze(-1)
beta_t = beta[:, :, i].unsqueeze(-1)
last_recurrent_state = last_recurrent_state * g_t
kv_mem = (last_recurrent_state * k_t.unsqueeze(-1)).sum(dim=-2)
delta = (v_t - kv_mem) * beta_t
last_recurrent_state = last_recurrent_state + k_t.unsqueeze(-1) * delta.unsqueeze(-2)
core_attn_out[:, :, i] = (last_recurrent_state * q_t.unsqueeze(-1)).sum(dim=-2)
if not output_final_state:
last_recurrent_state = None
core_attn_out = core_attn_out.transpose(1, 2).contiguous().to(initial_dtype)
return core_attn_out, last_recurrent_state这个函数实现了 Qwen3-next 使用的一种 RNN 化的注意力机制 。它不使用传统 Transformer 的 Softmax Attention,而改用一种 动态记忆矩阵 M_t 来处理序列。
核心思想:随着序列前进,用 key/value 逐步更新一个 d_k × d_v 的记忆矩阵,再用 query 从中读取输出。
整个过程是在线更新记忆矩阵,不用保存所有过去的 K/V 值,所以推理非常高效。
(1)预处理输入
- 可选:对 query/key 做 L2 归一化
- 把维度转成 (B, H, L, D)
- 转成 float32 计算
- 对 query 做 scale 缩放(同传统 attention)
(2)初始化记忆矩阵 M
python
last_recurrent_state # shape = (B, H, d_k, d_v)- 这是 attention 的"动态 KV 记忆"
- 初始为全 0 或给定初始状态
(3)对序列逐 token 处理(核心循环)
对每一步 t,执行如下操作:
(a) 读出 q_t, k_t, v_t, 门控 g_t 和学习率 beta_t
(b) 用 g_t 对记忆做遗忘衰减
python
M_t ← g_t * M_{t-1}g_t = exp(g) 确保门控 > 0。
(c) 计算当前记忆 M 对 v_t 的预测
python
kv_mem = M_t @ k_t也就是根据 key 方向从记忆读出 predicted value。
(d) 根据误差更新记忆(Delta Rule)
python
delta = (v_t - kv_mem) * beta_t
M_t ← M_t + k_t ⊗ delta含义:
- (v_t - kv_mem) 是"模型对 v 的预测误差"
- beta_t 是动态学习率
- 外积更新 k_t ⊗ delta 是 往记忆写入信息
这部分是整个算法的核心。
(e) 用 query 读出当前注意力输出
python
output_t = M_t @ q_t等价于:query 是"读指针",key 是"写指针",value 是内容。
(4)返回整段序列的输出与最终记忆
总结
这段代码实现的不是传统 Attention,而是:
一个带遗忘门 (g)、带学习率 (β) 的动态记忆 RNN Attention:用 key/value 的误差信号不断更新记忆矩阵,再用 query 读取输出。
其结构比 Softmax Attention 轻得多,适合长序列和 KV cache 替代。
参考
- src/transformers/models/qwen3_next/modeling_qwen3_next.py
- Qwen3-Next模型剖析
- Gated Delta Networks: Improving Mamba2 with Delta Rule
- Gated Attention for Large Language Models: Non-linearity, Sparsity, and Attention-Sink-Free
- Auxiliary-Loss-Free Load Balancing Strategy for Mixture-of-Experts
- Qwen/Qwen3-Next-80B-A3B-Instruct