低成本开源!ESP32-S3轮腿机器人实战:自平衡+身高调节,语音控制在路上
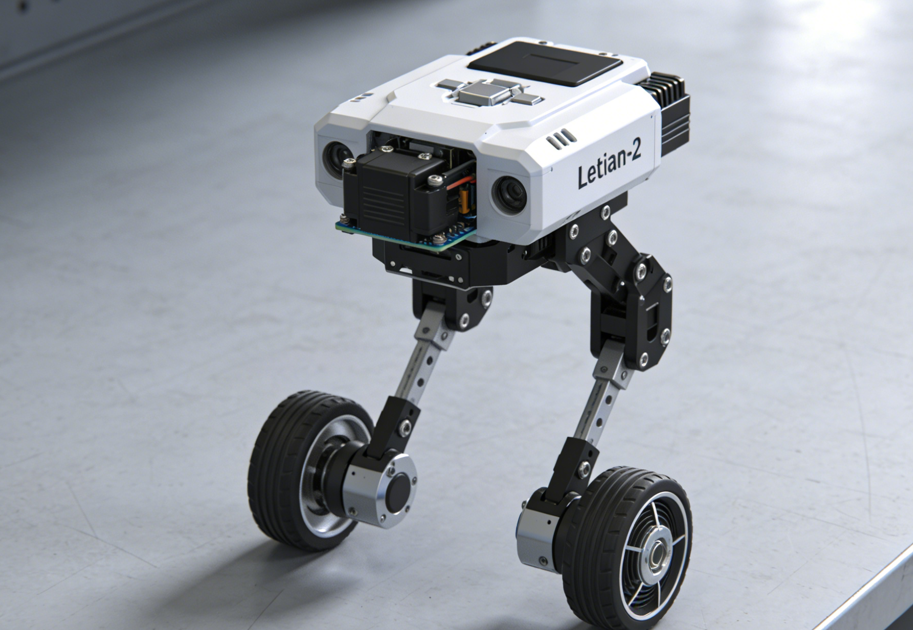
作为机器人爱好者,你是否想亲手打造一款兼具灵活性与功能性的轮腿机器人,却担心成本过高、技术门槛难跨越?今天给大家分享一个超实用的开源项目------L在这里插入代码片eTian-robot2,一款基于ESP32-S3的低成本轮腿机器人,不仅实现了自平衡、身高调节、无线控制等核心功能,还开源了全部PCB、原理图和代码,新手也能跟着复刻!
一、项目初衷:从模仿到创新,解锁轮腿机器人的更多可能
这款机器人的灵感来源于大名鼎鼎的Ascento机器人,最初的设计目标是通过实践学习控制算法,最终实现酷炫的跳跃功能。虽然受限于理论知识储备,跳跃功能的建模仿真与实物落地预计要到明年6月才能完成,但目前已成功实现自平衡、身高调节、无线控制三大核心功能,后续还将迭代离线语音控制,性价比直接拉满!
更值得一提的是,项目完全开源,从PCB设计图、原理图、三维模型到BOM清单,所有资源都能免费获取,大大降低了制作门槛,让更多爱好者能参与到轮腿机器人的研发与优化中。
二、硬件篇:低成本选材,兼顾性能与性价比
1. 核心主控与PCB设计
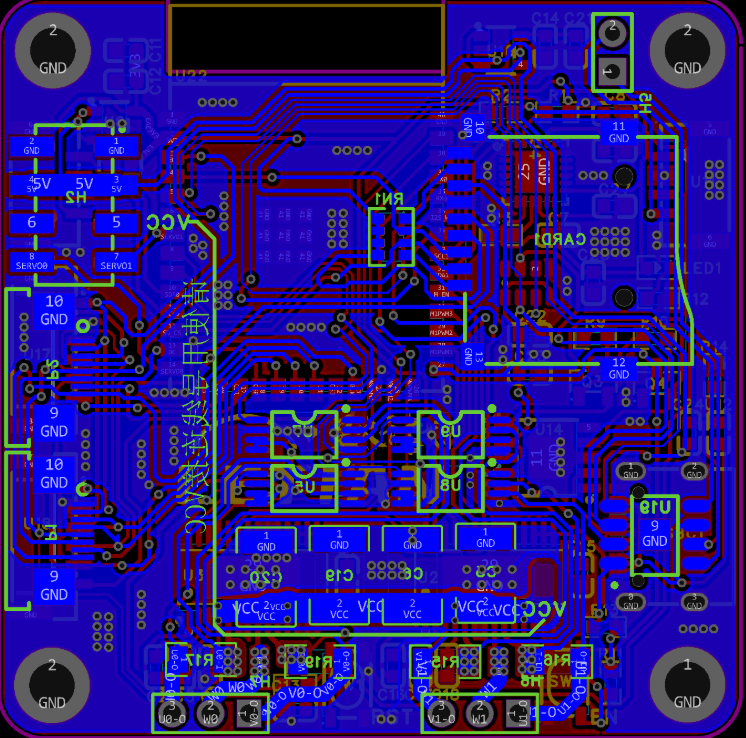
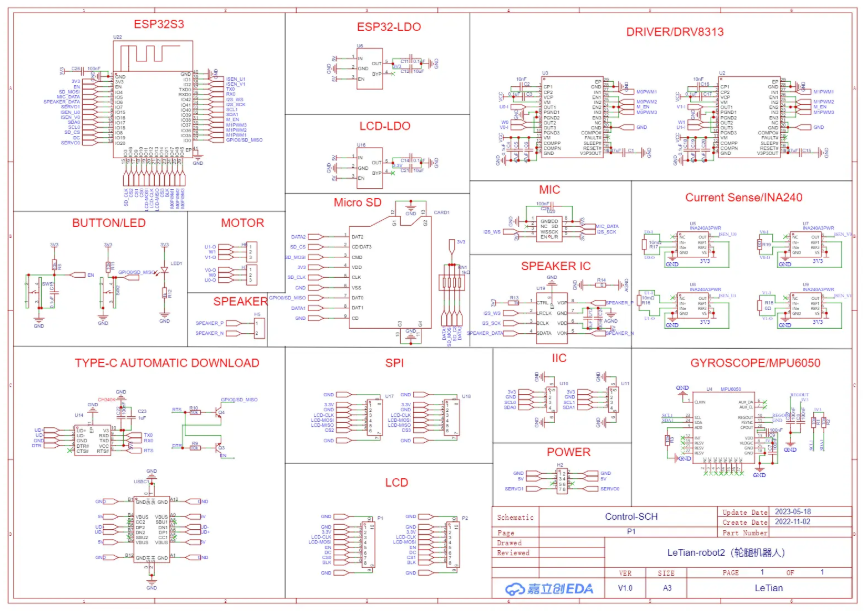
机器人的"大脑"选用ESP32-S3-WROOM-1-N8芯片,兼顾高性能与低功耗,支持离线语音识别,为后续功能升级埋下伏笔。PCB设计全程使用立创EDA专业版完成,机械结构绘图则采用CAD和Solidworks,整体尺寸仅48*48mm,小巧精致,便于安装部署。
PCB历经V2.0和V3.0两个版本迭代:
-
V2.0版本采用3层连接设计,主控与电机驱动分离,电机驱动使用L6234D芯片,双路升压芯片供电,但成本较高,暂不推荐量产;
-
V3.0为最终版(受疫情影响暂未拿到实物),将电机驱动全部集成到ESP32-S3主控,简化结构、降低成本,目前暂时采用"V2.0主控+电源层+4010电机单独驱动"的组合方案。
2. 关键元器件选型(低成本核心)
-
动力系统:足部采用4010无刷电机直驱,车轮与电机过盈配合,传动效率高;腿部用舵机控制,搭配XH2.54 3P接口,安装便捷。
-
驱动与稳压:选用DRV8313作为驱动芯片,峰值电流2.5A,专门适配10欧姆左右的云台电机;稳压方面采用LM2596提供稳定5V电压,为舵机供电更可靠。
-
传感器:板载MPU6050姿态传感器,精准采集机器人姿态数据,为自平衡算法提供核心支撑。
-
通讯与供电 :集成CH340K串口芯片,通过Type-C接口实现电脑通讯与程序下载;电源支持XT60接口输入,采用3S锂电池供电,续航持久。
3. 丰富接口,拓展性拉满
PCB板预留了丰富的接口,满足后续功能扩展需求:
-
两路舵机接口、两路无刷电机接口;
-
两路IIC接口、四路SPI接口;
-
两路FPC 0.5mm 8P LCD接口,可连接两个1.28寸圆形屏幕;
-
IO 0按键和RST复位按键,方便调试与重启。
三、软件篇:简单易上手,核心算法开源可复用
1. 开发平台与核心框架
代码开发基于VScode platform平台,主控运行ESP32 RTOS实时操作系统,通过多任务调度实现高效控制。电机驱动采用SimpleFOC算法,运行在扭矩模式下,稳定性更强,适合轮腿机器人的动力控制需求。
2. 核心功能实现逻辑
-
双任务调度:创建两个核心任务,分别负责串口控制电机和读取电机角度信息,同时支持Blinker APP蓝牙控制,操作便捷。
-
自平衡算法:通过MPU6050采集姿态数据,结合轮速信息进行PID运算,动态调节两侧舵机角度和电机力矩,实现机器人稳定平衡。
-
电机初始化优化:首次上电时运行motor.initFOC()函数,串口输出电机转向和偏差角度后填入参数,下次上电即可跳过自检,提升启动效率。
-
无线控制:除了串口控制,还支持Blinker APP蓝牙连接,手机端即可调节机器人姿态、身高,操作直观易懂。
3. 后续软件迭代计划
目前代码已实现核心功能的稳定运行,后续将重点优化:
-
适配ESP-IDF开发平台,开发离线语音控制功能;
-
优化PID参数,提升机器人在复杂地形的平衡能力;
-
完善机械结构与算法的适配性,增强抗干扰性。
四、项目现状与开源资源汇总
受疫情影响,V3.0版本的SMT主板暂未取回,目前使用的临时方案存在左轮电机控制效果欠佳的问题,待疫情好转后将及时更新V3.0版本程序与调试教程。
开源资源(全部免费获取)
-
设计文件:PCB设计图、原理图、三维模型(STL格式);
-
代码资源:VScode platform项目工程文件;
-
教程视频:电路讲解、代码讲解、三维模型演示视频;
-
BOM清单:详细的元器件采购清单,直接对接供应商,采购无踩坑。
资源下载地址:
代码:https://download.csdn.net/download/xiesibo2012/92528868
模型:https://download.csdn.net/download/xiesibo2012/92528791
3d打印件:https://download.csdn.net/download/xiesibo2012/92528866
五、总结:低成本入门轮腿机器人的绝佳选择
LeTian-robot2项目以ESP32-S3为核心,通过低成本元器件选型、开源设计降低了入门门槛,同时兼顾了功能的完整性与拓展性。无论是想学习机器人控制算法、PCB设计,还是想亲手打造一款实用的轮腿机器人,这个项目都值得一试。
后续随着V3.0版本的落地和跳跃功能、语音控制的迭代,机器人的实用性还将进一步提升。如果你也对轮腿机器人感兴趣,不妨下载开源资源动手尝试,也欢迎在项目评论区交流探讨,一起优化这款低成本ESP32轮腿机器人!