一、TDI 探测器工作原理
TDI型探测器,全称是Time Delay and Integration(时间延迟积分),本质是一种特殊的线阵探测器结构。其核心工作原理是利用目标与探测器的相对匀速运动 ,通过多级感光单元对同一目标信号进行时间延迟积分累加,从而大幅提升弱光下的成像信噪比。
二、TDI探测器工作过程
工作过程可拆解为以下3个关键步骤:
2.1 结构基础:多级线阵串联
TDI探测器由多行性能一致的线阵单元组成,探测器32*256就是32级分辨率256(如32级就是TDI级数,还有64级、128级等)。
如下图所示,32级性能一致探测器单元,与检测运动方向一致。

每一级线阵都是独立的感光单元,且相邻列之间的信号读取存在固定的时间延迟。
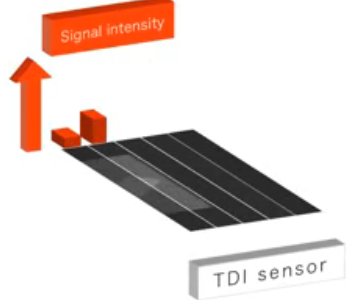
2.2 同步运动匹配:信号精准衔接
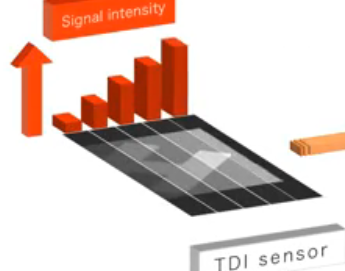
成像时,检测目标需与探测器做严格的匀速相对运动 。当目标的某一特征点经过第1级线阵时,该级像素会采集并存储这一特征的光信号; 随着目标匀速移动,同一特征点会在固定延迟时间后到达第2级线阵,此时第2级像素同步采集信号,并与第1级的信号进行累加; 以此类推,该特征点依次经过所有级数的线阵单元,每一级都会将采集到的信号叠加到前一级的信号上。
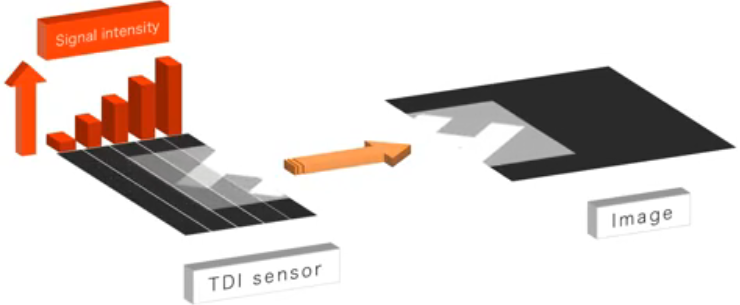
2.3 积分累加增效:提升弱光灵敏度
最终输出的信号是所有级数单元采集信号的总和。假设TDI级数为N,理论上输出信号强度可提升至单级线阵的N倍,同时噪声仅提升\sqrt{N}倍,整体信噪比可提升\sqrt{N}倍。
2.4 核心关键点
- 运动同步性是前提:如果目标运动速度与延迟时间不匹配,同一特征点无法精准落在后续级数的对应像素上,会导致信号错位、图像模糊,因此TDI探测器必须搭配速度同步控制系统使用。
- 级数与性能的平衡:级数越高,信噪比提升越明显,但对运动同步精度的要求也越高,同时探测器的成本和体积也会相应增加。
三、 线阵、面阵、TDI探测器关键性能与适用场景差异
3.1 线阵探测器
- 成像原理 :单次仅采集一条线的光学信息,需配合运动扫描(如物体移动、探测器移动)拼接成二维图像
- 优势 :单像素感光面积大、分辨率高、动态范围宽,适合对一维细节的高精度采集。
- 局限:必须依赖扫描运动,静止物体无法成像;成像速度受扫描频率限制。
3.2 面阵探测器
- 成像原理:单次曝光即可直接采集二维平面的全部光学信息,无需扫描,直接输出二维图像
- 优势 :无需扫描,实时成像,操作简单,适配静态和动态目标。
- 局限:像素密度高导致单像素感光面积小,弱光环境下信噪比低;大面阵探测器成本较高。
3.3 TDI型探测器

- 成像原理:利用目标与探测器的相对运动,让同一目标的光子依次入射到多级线阵单元上,通过积分累加提升信号强度
- 优势 :通过多级积分,弱光灵敏度极高,且运动模糊小;兼具线阵的高分辨率和面阵的高效成像能力。
- 局限 :对运动同步性要求严格(目标运动速度需与积分延迟精准匹配);仅适用于匀速运动的目标。
3.4 核心区别总结
- 成像维度:线阵是"一维采集+扫描合成二维",面阵是"直接二维采集",TDI是"多级一维积分+运动合成二维"。
- 灵敏度:TDI型 > 线阵 > 面阵(弱光环境下)。
- 运动适配 :TDI型仅适配匀速运动目标,线阵需要主动扫描,面阵无运动限制。
四、 TDI探测器在工业检测的应用场景
4.1工业检测与电子制造
- 半导体晶圆缺陷检测:TDI 相机检测 12 英寸晶圆表面划痕、颗粒污染及光刻掩膜版图案精度。
- FPD 平板显示检测:在 OLED/LCD 生产线中,TDI 线阵相机同步扫描基板,快速识别像素亮点 / 暗点、Mura 亮度不均及触摸屏线路断路。
- PCB 与电子组装 X 射线检测:TDI 探测器检测 ECU 板引线键合、BGA 焊球空洞,双向扫描覆盖整板。
4.2 新能源与材料检测
- 锂电池极片高速检测:检测涂层厚度不均、针孔及边缘毛刺。
- 太阳能硅片隐裂检测:在光伏产线中,TDI 相机识别 隐裂及绒面结构异常。
4.3 食品与包装检测
- 高速食品异物 X 射线检测:TDI 探测器扫描瓶装饮料、罐装肉类,识别金属碎片、玻璃渣等异物。
- 药品包装密封性检测:TDI 相机扫描铝塑泡罩包装,通过透射光强变化判断热封层泄漏。
觉得本文对您有一点帮助,欢迎讨论、点赞、收藏,您的支持激励我多多创作。