《Walk These Ways》论文方法详解:基于行为多样性的机器人控制泛化
1. 方法总体框架
论文提出了一种称为"行为多样性"(Multiplicity of Behavior, MoB)的方法,其核心思想是训练单个策略,使其能够根据行为参数执行多种不同的运动风格。这种方法允许在不重新训练的情况下,通过调整行为参数来适应新的任务和环境。
1.1 问题背景与动机
- 传统强化学习策略通常只学习一种解决训练任务的方式,缺乏灵活适应新环境的能力
- 当遇到分布外环境时,通常需要重新设计奖励函数、环境参数并重新训练,这是一个繁琐的迭代过程
- 作者观察到:同一任务有多种等效的解决方案 ,不同解决方案在不同环境中可能有不同的泛化能力
- 例如:在平地上行走时,"蹲伏"步态(低身体高度)和"踏步"步态(高腿摆动)都能完成任务
- 但"蹲伏"步态能在障碍物下通过,而"踏步"步态能爬楼梯
1.2 方法形式化
作者训练了一个条件策略:
π(at∣ot−H...ot,ct−H...ct,bt−H...bt)\pi(a_t|o_{t-H}...o_t, c_{t-H}...c_t, b_{t-H}...b_t)π(at∣ot−H...ot,ct−H...ct,bt−H...bt)
其中:
- oto_tot:历史观察(关节位置/速度、重力向量等)
- ctc_tct:任务命令(期望的线速度和角速度)
- btb_tbt:行为参数(指定运动风格)
- ata_tat:动作(关节目标位置)
2. Go1机器人系统架构
2.1 Go1机器人本体
Unitree Go1是一款四足机器人,具有以下特点:
-
自由度配置:12个驱动关节(每条腿3个关节:髋关节、大腿关节、小腿关节)
-
关节命名 :
FL_hip_joint,FL_thigh_joint,FL_calf_joint(左前腿),FR_hip_joint,FR_thigh_joint,FR_calf_joint(右前腿),RL_hip_joint,RL_thigh_joint,RL_calf_joint(左后腿),RR_hip_joint,RR_thigh_joint,RR_calf_joint(右后腿) -
默认关节角度(代码中定义):
12:27:go1_gym/envs/go1/go1_config.py
_.default_joint_angles = { # = target angles [rad] when action = 0.0
'FL_hip_joint': 0.1, # [rad]
'RL_hip_joint': 0.1, # [rad]
'FR_hip_joint': -0.1, # [rad]
'RR_hip_joint': -0.1, # [rad]
'FL_thigh_joint': 0.8, # [rad]
'RL_thigh_joint': 1., # [rad]
'FR_thigh_joint': 0.8, # [rad]
'RR_thigh_joint': 1., # [rad]
'FL_calf_joint': -1.5, # [rad]
'RL_calf_joint': -1.5, # [rad]
'FR_calf_joint': -1.5, # [rad]
'RR_calf_joint': -1.5 # [rad]
}- 初始位置:躯干高度0.34m(相对于地面)
2.2 仿真环境设置
系统使用Isaac Gym作为物理仿真器:
- 并行环境数量 :默认4000个并行环境(
num_envs = 4000) - 控制频率 :50Hz(控制周期dt=0.02dt = 0.02dt=0.02秒)
- 仿真频率 :更高频率的物理步进(通过
decimation=4参数控制,即每4个仿真步执行一次控制更新)
环境配置(代码实现):
29:37:go1_gym/envs/go1/go1_config.py
_ = Cnfg.control
_.control_type = 'P'
_.stiffness = {'joint': 20.} # [N*m/rad]
_.damping = {'joint': 0.5} # [N*m*s/rad]
# action scale: target angle = actionScale * action + defaultAngle
_.action_scale = 0.25
_.hip_scale_reduction = 0.5
# decimation: Number of control action updates @ sim DT per policy DT
_.decimation = 42.3 地形生成
训练时主要使用平坦地形,但系统支持多种地形类型:
- 平坦地形:用于基础训练和sim-to-real迁移
- 地形类型 (代码支持)**:
- 斜坡地形(sloped terrain)
- 台阶地形(stairs)
- 离散障碍物(discrete obstacles)
- 随机均匀地形(random uniform terrain)
地形配置(训练时):
59:67:go1_gym/envs/go1/go1_config.py
_ = Cnfg.terrain
_.mesh_type = 'trimesh'
_.measure_heights = False
_.terrain_noise_magnitude = 0.0
_.teleport_robots = True
_.border_size = 50
_.terrain_proportions = [0, 0, 0, 0, 0, 0, 0, 0, 1.0]
_.curriculum = False其中terrain_proportions的最后一个元素为1.0表示100%使用平坦地形。
3. 状态、观测、动作与奖励定义
3.1 状态空间(State Space)
机器人的完整状态包括:
-
根状态(Root State):13维向量
- 位置:pbase∈R3p_{base} \in \mathbb{R}^3pbase∈R3(世界坐标系)
- 四元数:qbase∈R4q_{base} \in \mathbb{R}^4qbase∈R4(姿态)
- 线速度:vbase∈R3v_{base} \in \mathbb{R}^3vbase∈R3(世界坐标系)
- 角速度:ωbase∈R3\omega_{base} \in \mathbb{R}^3ωbase∈R3(世界坐标系)
-
关节状态:
- 关节位置:q∈R12q \in \mathbb{R}^{12}q∈R12(12个关节角度)
- 关节速度:q˙∈R12\dot{q} \in \mathbb{R}^{12}q˙∈R12(12个关节角速度)
-
接触状态:
- 脚部接触力:ffoot∈R4×3f_{foot} \in \mathbb{R}^{4 \times 3}ffoot∈R4×3(4只脚,每只脚3维力向量)
3.2 观测空间(Observation Space)
观测向量oto_tot由以下部分组成(按代码实现顺序):
3.2.1 基础观测
-
投影重力向量 (3维):
gproj=Rbase−1⋅gworldg_{proj} = R_{base}^{-1} \cdot g_{world}gproj=Rbase−1⋅gworld其中RbaseR_{base}Rbase是机器人基座旋转矩阵,gworld=0,0,−9.81Tg_{world} = 0, 0, -9.81^Tgworld=0,0,−9.81T。投影重力向量表示机器人相对于重力的倾斜程度。
-
任务命令 (15维,由
num_commands配置):
ct=vxcmd,vycmd,ωzcmd,hzcmd,fcmd,θ1cmd,θ2cmd,θ3cmd,hzf,cmd,ϕcmd,sycmd,...c_t = v\^{cmd}_x, v\^{cmd}_y, \\omega\^{cmd}_z, h\^{cmd}_z, f\^{cmd}, \\theta\^{cmd}_1, \\theta\^{cmd}_2, \\theta\^{cmd}_3, h\^{f,cmd}_z, \\phi\^{cmd}, s\^{cmd}_y, ...ct=vxcmd,vycmd,ωzcmd,hzcmd,fcmd,θ1cmd,θ2cmd,θ3cmd,hzf,cmd,ϕcmd,sycmd,...包括速度命令、身体高度、步频、相位偏移、脚摆动高度、俯仰角、站立宽度等。
-
关节位置偏差 (12维):
(q−qdefault)×scalepos(q - q_{default}) \times scale_{pos}(q−qdefault)×scalepos相对于默认关节角度的偏差,经过缩放。
-
关节速度 (12维):
q˙×scalevel\dot{q} \times scale_{vel}q˙×scalevel关节角速度,经过缩放。
-
上一时刻动作 (12维):
用于动作平滑性。
代码实现:
302:326:go1_gym/envs/base/legged_robot.py
def compute_observations(self):
""" Computes observations
"""
self.obs_buf = torch.cat((self.projected_gravity,
(self.dof_pos[:, :self.num_actuated_dof] - self.default_dof_pos[:,
:self.num_actuated_dof]) * self.obs_scales.dof_pos,
self.dof_vel[:, :self.num_actuated_dof] * self.obs_scales.dof_vel,
self.actions
), dim=-1)
if self.cfg.env.observe_command:
self.obs_buf = torch.cat((self.projected_gravity,
self.commands * self.commands_scale,
(self.dof_pos[:, :self.num_actuated_dof] - self.default_dof_pos[:,
:self.num_actuated_dof]) * self.obs_scales.dof_pos,
self.dof_vel[:, :self.num_actuated_dof] * self.obs_scales.dof_vel,
self.actions
), dim=-1)
if self.cfg.env.observe_two_prev_actions:
self.obs_buf = torch.cat((self.obs_buf,
self.last_actions), dim=-1)3.2.2 可选观测
根据配置,可能还包括:
-
时钟输入 (4维):每个脚的正弦定时变量
clockfoot=sin(2π⋅tfoot)clock_{foot} = \sin(2\pi \cdot t_{foot})clockfoot=sin(2π⋅tfoot) -
速度观测(6维):基座线速度和角速度(本体坐标系)
-
接触状态(4维):每只脚是否接触地面
时钟输入计算(代码实现):
336:338:go1_gym/envs/base/legged_robot.py
if self.cfg.env.observe_clock_inputs:
self.obs_buf = torch.cat((self.obs_buf,
self.clock_inputs), dim=-1)3.2.3 历史观测
系统使用30步历史观测 (num_observation_history = 30),通过HistoryWrapper实现:
11:15:go1_gym/envs/wrappers/history_wrapper.py
self.obs_history_length = self.env.cfg.env.num_observation_history
self.num_obs_history = self.obs_history_length * self.num_obs
self.obs_history = torch.zeros(self.env.num_envs, self.num_obs_history, dtype=torch.float,
device=self.env.device, requires_grad=False)最终输入到策略网络的观测维度为:30×70=210030 \times 70 = 210030×70=2100维(假设单步观测为70维)。
3.3 动作空间(Action Space)
动作at∈R12a_t \in \mathbb{R}^{12}at∈R12表示12个关节的目标位置偏移。
动作到目标关节角度的转换 :
qtarget=at×scaleaction×scalehip+qdefaultq_{target} = a_t \times scale_{action} \times scale_{hip} + q_{default}qtarget=at×scaleaction×scalehip+qdefault
其中:
- scaleaction=0.25scale_{action} = 0.25scaleaction=0.25:全局动作缩放
- scalehip=0.5scale_{hip} = 0.5scalehip=0.5:髋关节额外缩放(减小髋关节运动范围)
- qdefaultq_{default}qdefault:默认关节角度
代码实现:
918:926:go1_gym/envs/base/legged_robot.py
# pd controller
actions_scaled = actions[:, :12] * self.cfg.control.action_scale
actions_scaled[:, [0, 3, 6, 9]] *= self.cfg.control.hip_scale_reduction # scale down hip flexion range
if self.cfg.domain_rand.randomize_lag_timesteps:
self.lag_buffer = self.lag_buffer[1:] + [actions_scaled.clone()]
self.joint_pos_target = self.lag_buffer[0] + self.default_dof_pos
else:
self.joint_pos_target = actions_scaled + self.default_dof_pos3.4 从动作到电机扭矩的完整流程
3.4.1 PD控制器
系统使用PD(比例-微分)控制器将目标关节位置转换为关节扭矩:
τ=Kp⋅Kp,factor⋅(qtarget−q+Δqoffset)−Kd⋅Kd,factor⋅q˙\tau = K_p \cdot K_{p,factor} \cdot (q_{target} - q + \Delta q_{offset}) - K_d \cdot K_{d,factor} \cdot \dot{q}τ=Kp⋅Kp,factor⋅(qtarget−q+Δqoffset)−Kd⋅Kd,factor⋅q˙
其中:
- Kp=20K_p = 20Kp=20 N·m/rad:比例增益(刚度)
- Kd=0.5K_d = 0.5Kd=0.5 N·m·s/rad:微分增益(阻尼)
- Kp,factor,Kd,factorK_{p,factor}, K_{d,factor}Kp,factor,Kd,factor:域随机化的增益因子
- Δqoffset\Delta q_{offset}Δqoffset:电机位置偏移(域随机化)
代码实现:
939:941:go1_gym/envs/base/legged_robot.py
elif control_type == "P":
torques = self.p_gains * self.Kp_factors * (
self.joint_pos_target - self.dof_pos + self.motor_offsets) - self.d_gains * self.Kd_factors * self.dof_vel3.4.2 执行器网络(Actuator Network)
为了更准确地模拟真实电机行为,系统使用执行器网络替代理想PD控制器。执行器网络是一个神经网络,输入为:
x=et,et−1,et−2,q˙t,q˙t−1,q˙t−2x = e_t, e_{t-1}, e_{t-2}, \\dot{q}_t, \\dot{q}_{t-1}, \\dot{q}_{t-2}x=et,et−1,et−2,q˙t,q˙t−1,q˙t−2
其中et=qtarget−qe_t = q_{target} - qet=qtarget−q是位置误差。
代码实现:
930:938:go1_gym/envs/base/legged_robot.py
if control_type == "actuator_net":
self.joint_pos_err = self.dof_pos - self.joint_pos_target + self.motor_offsets
self.joint_vel = self.dof_vel
torques = self.actuator_network(self.joint_pos_err, self.joint_pos_err_last, self.joint_pos_err_last_last,
self.joint_vel, self.joint_vel_last, self.joint_vel_last_last)
self.joint_pos_err_last_last = torch.clone(self.joint_pos_err_last)
self.joint_pos_err_last = torch.clone(self.joint_pos_err)
self.joint_vel_last_last = torch.clone(self.joint_vel_last)
self.joint_vel_last = torch.clone(self.joint_vel)执行器网络从预训练模型加载:
1238:1240:go1_gym/envs/base/legged_robot.py
if self.cfg.control.control_type == "actuator_net":
actuator_path = f'{os.path.dirname(os.path.dirname(os.path.realpath(__file__)))}/../../resources/actuator_nets/unitree_go1.pt'
actuator_network = torch.jit.load(actuator_path).to(self.device)3.4.3 扭矩限制
最终扭矩经过限制和电机强度缩放:
τfinal=clip(τ×strengthmotor,−τlimit,τlimit)\tau_{final} = clip(\tau \times strength_{motor}, -\tau_{limit}, \tau_{limit})τfinal=clip(τ×strengthmotor,−τlimit,τlimit)
代码实现:
945:946:go1_gym/envs/base/legged_robot.py
torques = torques * self.motor_strengths
return torch.clip(torques, -self.torque_limits, self.torque_limits)3.4.4 完整控制流程总结
从速度/位置指令到电机扭矩的完整流程:
- 策略网络输出 :at∈R12a_t \in \mathbb{R}^{12}at∈R12(动作)
- 动作缩放 :ascaled=at×0.25a_{scaled} = a_t \times 0.25ascaled=at×0.25,髋关节额外缩放×0.5\times 0.5×0.5
- 目标关节角度 :qtarget=ascaled+qdefaultq_{target} = a_{scaled} + q_{default}qtarget=ascaled+qdefault
- PD控制/执行器网络 :
- PD模式:τ=Kp(qtarget−q)−Kdq˙\tau = K_p(q_{target} - q) - K_d \dot{q}τ=Kp(qtarget−q)−Kdq˙
- 执行器网络模式:τ=ActuatorNet(et,et−1,et−2,q˙t,q˙t−1,q˙t−2)\tau = ActuatorNet(e_t, e_{t-1}, e_{t-2}, \dot{q}t, \dot{q}{t-1}, \dot{q}_{t-2})τ=ActuatorNet(et,et−1,et−2,q˙t,q˙t−1,q˙t−2)
- 扭矩限制 :τfinal=clip(τ×strength,−τmax,τmax)\tau_{final} = clip(\tau \times strength, -\tau_{max}, \tau_{max})τfinal=clip(τ×strength,−τmax,τmax)
- 发送到仿真器 :τfinal\tau_{final}τfinal直接作用于关节
4. 任务与行为参数设计
4.1 任务命令 (Task Specification)
任务指定为3维命令向量:
ct=vxcmd,vycmd,ωzcmdc_t = v\^{cmd}_x, v\^{cmd}_y, \\omega\^{cmd}_zct=vxcmd,vycmd,ωzcmd
- vxcmd,vycmdv^{cmd}_x, v^{cmd}_yvxcmd,vycmd:在机器人本体坐标系x-y轴上期望的线速度
- ωzcmd\omega^{cmd}_zωzcmd:在偏航轴(yaw axis)上期望的角速度
采样范围(代码配置):
74:86:go1_gym/envs/go1/go1_config.py
_ = Cnfg.commands
_.heading_command = False
_.resampling_time = 10.0
_.command_curriculum = True
_.num_lin_vel_bins = 30
_.num_ang_vel_bins = 30
_.lin_vel_x = [-0.6, 0.6]
_.lin_vel_y = [-0.6, 0.6]
_.ang_vel_yaw = [-1, 1]4.2 行为参数 (Behavior Specification)
行为参数定义为15维向量(代码中num_commands = 15)。完整定义如下:
bt=vxcmd,vycmd,ωzcmd,hzcmd,fcmd,θ1cmd,θ2cmd,θ3cmd,dcmd,hzf,cmd,ϕcmd,ψcmd,sycmd,lcmd,...b_t = v\^{cmd}_x, v\^{cmd}_y, \\omega\^{cmd}_z, h\^{cmd}_z, f\^{cmd}, \\theta\^{cmd}_1, \\theta\^{cmd}_2, \\theta\^{cmd}_3, d\^{cmd}, h\^{f,cmd}_z, \\phi\^{cmd}, \\psi\^{cmd}, s\^{cmd}_y, l\^{cmd}, ...bt=vxcmd,vycmd,ωzcmd,hzcmd,fcmd,θ1cmd,θ2cmd,θ3cmd,dcmd,hzf,cmd,ϕcmd,ψcmd,sycmd,lcmd,...
完整参数列表:
| 索引 | 符号 | 名称 | 采样范围 | 用途说明 |
|---|---|---|---|---|
| 0 | vxcmdv^{cmd}_xvxcmd | 线速度x命令 | -1.0, 1.0 m/s | 任务命令,用于速度跟踪奖励 |
| 1 | vycmdv^{cmd}_yvycmd | 线速度y命令 | -0.6, 0.6 m/s | 任务命令,用于速度跟踪奖励 |
| 2 | ωzcmd\omega^{cmd}_zωzcmd | 角速度yaw命令 | -1.0, 1.0 rad/s | 任务命令,用于角速度跟踪奖励和Raibert启发式 |
| 3 | hzcmdh^{cmd}_zhzcmd | 身体高度命令 | -0.25, 0.15 m | 去掉基座高度的净身高,用于身体高度跟踪奖励(_reward_jump) |
| 4 | fcmdf^{cmd}fcmd | 步频命令 | 2.0, 4.0 Hz | 用于计算步态相位和Raibert启发式 |
| 5 | θ1cmd\theta^{cmd}_1θ1cmd (phases) | 相位偏移1 | 0.0, 1.0 | 用于计算步态相位偏移,影响期望接触状态和时钟输入 |
| 6 | θ2cmd\theta^{cmd}_2θ2cmd (offsets) | 相位偏移2 | 0.0, 1.0 | 用于计算步态相位偏移,影响期望接触状态和时钟输入 |
| 7 | θ3cmd\theta^{cmd}_3θ3cmd (bounds) | 相位偏移3 | 0.0, 1.0 | 用于计算步态相位偏移,影响期望接触状态和时钟输入 |
| 8 | dcmdd^{cmd}dcmd (durations) | 支撑相持续时间 | 0.5, 0.5 | 用于durations warping,影响期望接触状态计算 |
| 9 | hzf,cmdh^{f,cmd}_zhzf,cmd | 脚摆动高度命令 | 0.03, 0.35 m | 用于脚摆动高度跟踪奖励(_reward_feet_clearance_cmd_linear) |
| 10 | ϕcmd\phi^{cmd}ϕcmd (body_pitch) | 身体俯仰角命令 | -0.4, 0.4 rad | 用于身体姿态控制奖励(_reward_orientation_control) |
| 11 | ψcmd\psi^{cmd}ψcmd (body_roll) | 身体滚动角命令 | -0.0, 0.0 rad | 用于身体姿态控制奖励(_reward_orientation_control) |
| 12 | sycmds^{cmd}_ysycmd (stance_width) | 站立宽度命令 | 0.10, 0.45 m | 用于Raibert启发式奖励,计算期望脚位置 |
| 13 | lcmdl^{cmd}lcmd (stance_length) | 站立长度命令 | 0.35, 0.45 m | 用于Raibert启发式奖励,计算期望脚位置 |
| 14 | - | (预留) | - | 当前未使用 |
参数使用位置总结:
- 任务命令(索引0-2):用于任务奖励(速度跟踪)
- 步态参数(索引4-8):用于计算期望接触状态、时钟输入、步态相位
- 身体参数(索引3, 10-11):用于身体高度和姿态跟踪奖励
- 脚部参数(索引9, 12-13):用于脚摆动高度和Raibert启发式奖励
4.2.1 步态相位偏移 (Timing Offsets)
用"相位(phase)"来描述一条腿在一个步态周期中的时间位置;用"相位偏移(offset)"来让四条腿在同一个周期里"错开",从而形成小跑/踱步/跳跃等典型步态。
4.2.1.1 步态基础概念
什么是步态? 步态(Gait)是指四足动物行走时,四条腿的协调运动模式。每条腿的运动可以分为两个阶段:
- 支撑相(Stance Phase):脚接触地面,支撑身体
- 摆动相(Swing Phase):脚离开地面,向前摆动
什么是相位? 相位(Phase)表示每条腿在步态周期中的位置。我们将一个完整的步态周期归一化为0到1之间的数值:
- 相位 = 0:步态周期开始
- 相位 = 0.5:步态周期的一半
- 相位 = 1:步态周期结束(等同于0,因为周期是循环的)
相位偏移的作用:通过调整不同腿之间的相位差,可以产生不同的步态模式。例如:
- 如果两条腿的相位差为0,它们会同时抬起和放下(同步)
- 如果两条腿的相位差为0.5,它们会交替抬起和放下(异步)
4.2.1.2 四足机器人的腿编号
Go1机器人有四条腿,按以下方式编号:
- FL(Front Left):左前腿
- FR(Front Right):右前腿
- RL(Rear Left):左后腿
- RR(Rear Right):右后腿
从上方俯视机器人:
FL | FR
----|----
RL | RR4.2.1.3 步态相位偏移参数
系统使用三个参数来控制四条腿之间的相位关系:
θcmd=(θ1cmd,θ2cmd,θ3cmd)\theta^{cmd} = (\theta^{cmd}_1, \theta^{cmd}_2, \theta^{cmd}_3)θcmd=(θ1cmd,θ2cmd,θ3cmd)
这些参数分别对应代码中的:
phases= θ1cmd\theta^{cmd}_1θ1cmd:主要相位偏移offsets= θ2cmd\theta^{cmd}_2θ2cmd:次要偏移bounds= θ3cmd\theta^{cmd}_3θ3cmd:边界偏移
核心思想:通过给每条腿的相位加上不同的偏移量,可以控制哪些腿同步运动,哪些腿交替运动。
4.2.1.4 步态索引的计算
系统维护一个全局的步态索引tgaitt_{gait}tgait,它从0开始,随着时间递增到1,然后循环:
tgait=remainder(tgait+dt×fcmd,1.0)t_{gait} = \text{remainder}(t_{gait} + dt \times f^{cmd}, 1.0)tgait=remainder(tgait+dt×fcmd,1.0)
其中:
- dt=0.02dt = 0.02dt=0.02秒:控制周期
- fcmdf^{cmd}fcmd:步频(Hz),表示每秒完成多少个步态周期
- 例如:fcmd=3f^{cmd} = 3fcmd=3 Hz表示每秒3个周期,每个周期约0.33秒
每条腿的相位计算(代码实现):
826:846:go1_gym/envs/base/legged_robot.py
def _step_contact_targets(self):
if self.cfg.env.observe_gait_commands:
frequencies = self.commands[:, 4]
phases = self.commands[:, 5]
offsets = self.commands[:, 6]
bounds = self.commands[:, 7]
durations = self.commands[:, 8]
self.gait_indices = torch.remainder(self.gait_indices + self.dt * frequencies, 1.0)
if self.cfg.commands.pacing_offset:
foot_indices = [self.gait_indices + phases + offsets + bounds,
self.gait_indices + bounds,
self.gait_indices + offsets,
self.gait_indices + phases]
else:
foot_indices = [self.gait_indices + phases + offsets + bounds,
self.gait_indices + offsets,
self.gait_indices + bounds,
self.gait_indices + phases]
self.foot_indices = torch.remainder(torch.cat([foot_indices[i].unsqueeze(1) for i in range(4)], dim=1), 1.0)在默认配置下(pacing_offset = False),每条腿的相位计算为:
- FL(左前) :tFL=tgait+θ1+θ2+θ3t_{FL} = t_{gait} + \theta_1 + \theta_2 + \theta_3tFL=tgait+θ1+θ2+θ3
- FR(右前) :tFR=tgait+θ2t_{FR} = t_{gait} + \theta_2tFR=tgait+θ2
- RL(左后) :tRL=tgait+θ3t_{RL} = t_{gait} + \theta_3tRL=tgait+θ3
- RR(右后) :tRR=tgait+θ1t_{RR} = t_{gait} + \theta_1tRR=tgait+θ1
关键理解:每条腿的相位 = 基础相位 + 偏移量。如果两条腿的偏移量相同,它们的相位就相同,会同步运动;如果偏移量相差0.5,它们会交替运动。
4.2.1.5 典型步态配置详解
让我们通过具体例子理解为什么不同的参数设置会产生不同的步态:
1. 小跑(Trotting)步态:θcmd=(0.5,0,0)\theta^{cmd} = (0.5, 0, 0)θcmd=(0.5,0,0)
计算每条腿的相位:
- FL:tFL=tgait+0.5+0+0=tgait+0.5t_{FL} = t_{gait} + 0.5 + 0 + 0 = t_{gait} + 0.5tFL=tgait+0.5+0+0=tgait+0.5
- FR:tFR=tgait+0+0=tgaitt_{FR} = t_{gait} + 0 + 0 = t_{gait}tFR=tgait+0+0=tgait
- RL:tRL=tgait+0=tgaitt_{RL} = t_{gait} + 0 = t_{gait}tRL=tgait+0=tgait
- RR:tRR=tgait+0.5t_{RR} = t_{gait} + 0.5tRR=tgait+0.5
结果:
- FR和RL的相位相同(都是tgaitt_{gait}tgait),它们同步运动
- FL和RR的相位相同(都是tgait+0.5t_{gait} + 0.5tgait+0.5),它们同步运动
- 前一对(FR+RL)和后一对(FL+RR)的相位相差0.5,它们交替运动
视觉化(用"●"表示脚在地面,"○"表示脚抬起):
时间点1: FL○ FR●
RL● RR○
时间点2: FL● FR○
RL○ RR●这就是对角线脚对同步的小跑步态,像马一样奔跑。
2. 跳跃(Pronking)步态:θcmd=(0.0,0,0)\theta^{cmd} = (0.0, 0, 0)θcmd=(0.0,0,0)
计算每条腿的相位:
- FL:tFL=tgait+0+0+0=tgaitt_{FL} = t_{gait} + 0 + 0 + 0 = t_{gait}tFL=tgait+0+0+0=tgait
- FR:tFR=tgait+0=tgaitt_{FR} = t_{gait} + 0 = t_{gait}tFR=tgait+0=tgait
- RL:tRL=tgait+0=tgaitt_{RL} = t_{gait} + 0 = t_{gait}tRL=tgait+0=tgait
- RR:tRR=tgait+0=tgaitt_{RR} = t_{gait} + 0 = t_{gait}tRR=tgait+0=tgait
结果 :所有腿的相位都相同,它们同时抬起和放下,就像兔子跳跃一样。
视觉化:
时间点1: FL● FR●
RR● RL●
时间点2: FL○ FR○
RR○ RL○3. 跳跃(Bounding)步态:θcmd=(0,0.5,0)\theta^{cmd} = (0, 0.5, 0)θcmd=(0,0.5,0)
计算每条腿的相位:
- FL:tFL=tgait+0+0.5+0=tgait+0.5t_{FL} = t_{gait} + 0 + 0.5 + 0 = t_{gait} + 0.5tFL=tgait+0+0.5+0=tgait+0.5
- FR:tFR=tgait+0.5=tgait+0.5t_{FR} = t_{gait} + 0.5 = t_{gait} + 0.5tFR=tgait+0.5=tgait+0.5
- RL:tRL=tgait+0=tgaitt_{RL} = t_{gait} + 0 = t_{gait}tRL=tgait+0=tgait
- RR:tRR=tgait+0=tgaitt_{RR} = t_{gait} + 0 = t_{gait}tRR=tgait+0=tgait
结果:
- 前腿(FL+FR)的相位相同,它们同步运动
- 后腿(RL+RR)的相位相同,它们同步运动
- 前腿和后腿的相位相差0.5,它们交替运动
视觉化:
时间点1: FL● FR●
RL○ RR○
时间点2: FL○ FR○
RL● RR●这就是前后脚对同步的跳跃步态,像狗一样跳跃前进。
4. 踱步(Pacing)步态:θcmd=(0,0,0.5)\theta^{cmd} = (0, 0, 0.5)θcmd=(0,0,0.5)
计算每条腿的相位:
- FL:tFL=tgait+0+0+0.5=tgait+0.5t_{FL} = t_{gait} + 0 + 0 + 0.5 = t_{gait} + 0.5tFL=tgait+0+0+0.5=tgait+0.5
- FR:tFR=tgait+0=tgaitt_{FR} = t_{gait} + 0 = t_{gait}tFR=tgait+0=tgait
- RL:tRL=tgait+0.5=tgait+0.5t_{RL} = t_{gait} + 0.5 = t_{gait} + 0.5tRL=tgait+0.5=tgait+0.5
- RR:tRR=tgait+0=tgaitt_{RR} = t_{gait} + 0 = t_{gait}tRR=tgait+0=tgait
结果:
- 左侧腿(FL+RL)的相位相同,它们同步运动
- 右侧腿(FR+RR)的相位相同,它们同步运动
- 左侧和右侧的相位相差0.5,它们交替运动
视觉化:
时间点1: FL○ FR●
RL○ RR●
时间点2: FL● FR○
RL● RR○这就是左右侧脚对同步的踱步步态,像骆驼一样行走。
4.2.1.6 支撑相持续时间
durations参数控制每条腿在支撑相(脚接触地面)的时间比例,通常设置为0.5,表示:
- 50%的时间脚在地面(支撑相)
- 50%的时间脚在空中(摆动相)
这个参数对所有腿都相同,确保步态的对称性。
4.2.2 期望接触状态计算
4.2.2.1 什么是期望接触状态?
期望接触状态 CfootcmdC^{cmd}_{foot}Cfootcmd是一个0到1之间的数值,表示在某个时刻,某条腿应该接触地面的概率:
- Cfootcmd=1C^{cmd}_{foot} = 1Cfootcmd=1:这条腿应该完全接触地面(支撑相)
- Cfootcmd=0C^{cmd}_{foot} = 0Cfootcmd=0:这条腿应该完全离开地面(摆动相)
- Cfootcmd=0.5C^{cmd}_{foot} = 0.5Cfootcmd=0.5:处于过渡状态
为什么需要期望接触状态? 在强化学习中,我们需要告诉策略"在某个时刻,某条腿应该接触地面"。这样策略才能学习正确的步态模式。
4.2.2.2 理想情况 vs 实际情况
理想情况:如果我们简单地定义:
- 当tfoot<0.5t_{foot} < 0.5tfoot<0.5时,Cfootcmd=1C^{cmd}_{foot} = 1Cfootcmd=1(支撑相)
- 当tfoot≥0.5t_{foot} \geq 0.5tfoot≥0.5时,Cfootcmd=0C^{cmd}_{foot} = 0Cfootcmd=0(摆动相)
这会产生一个硬切换 (硬边界),在tfoot=0.5t_{foot} = 0.5tfoot=0.5处突然从1跳到0。
问题:硬切换会导致:
- 训练不稳定:策略难以学习在切换点附近的行为
- 奖励信号不连续:在切换点附近,奖励函数会突然变化
- 实际运动不自然:真实世界中,脚的接触是逐渐发生的
4.2.2.3 平滑过渡的必要性
解决方案 :使用平滑函数 来定义期望接触状态,让它在支撑相和摆动相之间平滑过渡。
系统使用**正态分布的累积密度函数(CDF)**来实现平滑过渡。CDF函数的特点是:
- 输入值很小时,输出接近0
- 输入值很大时,输出接近1
- 在中间区域,输出平滑地从0过渡到1
4.2.2.4 期望接触状态的计算公式
数学表达 :
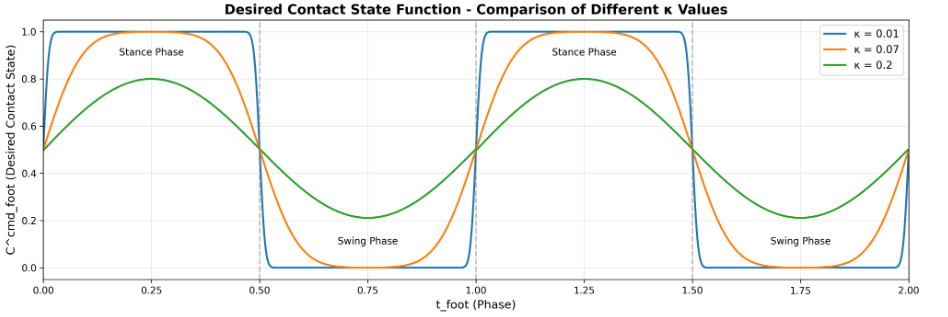
Cfootcmd(tfoot)=Φ(tfoot;κ)×(1−Φ(tfoot−0.5;κ))+Φ(tfoot−1;κ)×(1−Φ(tfoot−1.5;κ))C^{cmd}{foot}(t{foot}) = \Phi(t_{foot}; \kappa) \times (1-\Phi(t_{foot}-0.5; \kappa)) + \Phi(t_{foot}-1; \kappa) \times (1-\Phi(t_{foot}-1.5; \kappa))Cfootcmd(tfoot)=Φ(tfoot;κ)×(1−Φ(tfoot−0.5;κ))+Φ(tfoot−1;κ)×(1−Φ(tfoot−1.5;κ))
其中Φ(x;κ)\Phi(x; \kappa)Φ(x;κ)是均值为0、标准差为κ\kappaκ的正态分布CDF。κ=0.07\kappa = 0.07κ=0.07(kappa_gait_probs)控制接触-摆动转换的平滑度。
公式解释:
这个公式看起来复杂,但实际上它做了两件事:
-
第一个周期 (0≤tfoot<10 \leq t_{foot} < 10≤tfoot<1):
- 当tfoott_{foot}tfoot从0增加到0.5时,Φ(tfoot)\Phi(t_{foot})Φ(tfoot)从0增加到接近1,所以CfootcmdC^{cmd}_{foot}Cfootcmd从0增加到接近1(进入支撑相)
- 当tfoott_{foot}tfoot从0.5增加到1时,Φ(tfoot−0.5)\Phi(t_{foot}-0.5)Φ(tfoot−0.5)从0增加到接近1,所以(1−Φ(tfoot−0.5))(1-\Phi(t_{foot}-0.5))(1−Φ(tfoot−0.5))从1减少到接近0,导致CfootcmdC^{cmd}_{foot}Cfootcmd从1减少到接近0(进入摆动相)
-
第二个周期 (1≤tfoot<21 \leq t_{foot} < 21≤tfoot<2,通过模运算tfoot−1t_{foot}-1tfoot−1映射回0-1):
- 处理周期边界的情况,确保连续性
直观理解:
- 当tfoot=0t_{foot} = 0tfoot=0时:Cfootcmd≈0C^{cmd}_{foot} \approx 0Cfootcmd≈0(脚刚抬起)
- 当tfoot=0.25t_{foot} = 0.25tfoot=0.25时:Cfootcmd≈0.5C^{cmd}_{foot} \approx 0.5Cfootcmd≈0.5(过渡中)
- 当tfoot=0.5t_{foot} = 0.5tfoot=0.5时:Cfootcmd≈1C^{cmd}_{foot} \approx 1Cfootcmd≈1(完全接触)
- 当tfoot=0.75t_{foot} = 0.75tfoot=0.75时:Cfootcmd≈0.5C^{cmd}_{foot} \approx 0.5Cfootcmd≈0.5(过渡中)
- 当tfoot=1t_{foot} = 1tfoot=1时:Cfootcmd≈0C^{cmd}_{foot} \approx 0Cfootcmd≈0(脚刚抬起,开始新周期)
κ\kappaκ参数的作用:
- κ\kappaκ越小(如0.01),过渡越陡峭,接近硬切换
- κ\kappaκ越大(如0.2),过渡越平缓,但可能不够明确
- κ=0.07\kappa = 0.07κ=0.07是一个平衡值,既保证了平滑性,又保持了明确的支撑/摆动区分
代码实现:
873:902:go1_gym/envs/base/legged_robot.py
# von mises distribution
kappa = self.cfg.rewards.kappa_gait_probs
smoothing_cdf_start = torch.distributions.normal.Normal(0,
kappa).cdf # (x) + torch.distributions.normal.Normal(1, kappa).cdf(x)) / 2
smoothing_multiplier_FL = (smoothing_cdf_start(torch.remainder(foot_indices[0], 1.0)) * (
1 - smoothing_cdf_start(torch.remainder(foot_indices[0], 1.0) - 0.5)) +
smoothing_cdf_start(torch.remainder(foot_indices[0], 1.0) - 1) * (
1 - smoothing_cdf_start(
torch.remainder(foot_indices[0], 1.0) - 0.5 - 1)))
# ... 类似地计算其他腿的期望接触状态 ...
self.desired_contact_states[:, 0] = smoothing_multiplier_FL
self.desired_contact_states[:, 1] = smoothing_multiplier_FR
self.desired_contact_states[:, 2] = smoothing_multiplier_RL
self.desired_contact_states[:, 3] = smoothing_multiplier_RR代码中torch.remainder(foot_indices[i], 1.0)确保相位值在0-1范围内,处理周期循环。
4.2.2.5 期望接触状态的使用
在奖励计算中的应用:
desired_contact_states主要用于计算增强辅助奖励,确保策略按照指定的步态模式执行:
-
摆动相位跟踪奖励(力) (
_reward_tracking_contacts_shaped_force):67:75:go1_gym/envs/rewards/corl_rewards.pydef _reward_tracking_contacts_shaped_force(self): foot_forces = torch.norm(self.env.contact_forces[:, self.env.feet_indices, :], dim=-1) desired_contact = self.env.desired_contact_states reward = 0 for i in range(4): reward += - (1 - desired_contact[:, i]) * ( 1 - torch.exp(-1 * foot_forces[:, i] ** 2 / self.env.cfg.rewards.gait_force_sigma)) return reward / 4当脚应该处于摆动阶段时(1−Cfootcmd=11 - C^{cmd}_{foot} = 11−Cfootcmd=1),奖励鼓励零接触力。如果摆动阶段的脚仍然接触地面,会受到惩罚。
-
支撑相位跟踪奖励(速度) (
_reward_tracking_contacts_shaped_vel):77:84:go1_gym/envs/rewards/corl_rewards.pydef _reward_tracking_contacts_shaped_vel(self): foot_velocities = torch.norm(self.env.foot_velocities, dim=2).view(self.env.num_envs, -1) desired_contact = self.env.desired_contact_states reward = 0 for i in range(4): reward += - (desired_contact[:, i] * ( 1 - torch.exp(-1 * foot_velocities[:, i] ** 2 / self.env.cfg.rewards.gait_vel_sigma))) return reward / 4当脚应该处于支撑阶段时(Cfootcmd=1C^{cmd}_{foot} = 1Cfootcmd=1),奖励鼓励脚在地面上保持静止。如果支撑阶段的脚滑动,会受到惩罚。
-
脚摆动高度跟踪奖励 (
_reward_feet_clearance_cmd_linear):127:132:go1_gym/envs/rewards/corl_rewards.pydef _reward_feet_clearance_cmd_linear(self): phases = 1 - torch.abs(1.0 - torch.clip((self.env.foot_indices * 2.0) - 1.0, 0.0, 1.0) * 2.0) foot_height = (self.env.foot_positions[:, :, 2]).view(self.env.num_envs, -1) target_height = self.env.commands[:, 9].unsqueeze(1) * phases + 0.02 rew_foot_clearance = torch.square(target_height - foot_height) * (1 - self.env.desired_contact_states) return torch.sum(rew_foot_clearance, dim=1)仅在摆动阶段(1−Cfootcmd=11 - C^{cmd}_{foot} = 11−Cfootcmd=1)惩罚脚高度偏差,确保脚在摆动时达到指定高度。
4.2.3.2 时钟输入的计算
数学公式 :
clockfoot=sin(2π⋅tfoot)clock_{foot} = \sin(2\pi \cdot t_{foot})clockfoot=sin(2π⋅tfoot)
其中tfoott_{foot}tfoot是每条腿的相位(0到1之间)。
重要:durations warping处理
在计算clock_inputs之前,foot_indices还经过了durations warping处理,这是一个关键步骤:
848:854:go1_gym/envs/base/legged_robot.py
for idxs in foot_indices:
stance_idxs = torch.remainder(idxs, 1) < durations
swing_idxs = torch.remainder(idxs, 1) > durations
idxs[stance_idxs] = torch.remainder(idxs[stance_idxs], 1) * (0.5 / durations[stance_idxs])
idxs[swing_idxs] = 0.5 + (torch.remainder(idxs[swing_idxs], 1) - durations[swing_idxs]) * (
0.5 / (1 - durations[swing_idxs]))durations warping的作用:
这个处理将原始的foot_indices(基于步态周期)重新映射,使得:
- 支撑相 (原始0到
durations)被映射到0到0.5 - 摆动相 (原始
durations到1)被映射到0.5到1
为什么需要warping?
- 当
durations = 0.5时(50%支撑,50%摆动),warping是恒等映射(0→0,0.5→0.5,1→1) - 当
durations ≠ 0.5时,warping确保支撑相和摆动相在时钟输入中占据相等的"时间"(各占0.5) - 这使得sin函数能够均匀地表示支撑相和摆动相,而不是根据实际的支撑/摆动时间比例
warping后的语义变化:
经过warping后,foot_indices的语义从"在步态周期中的位置"变成了"在支撑相或摆动相中的位置":
- 0-0.5:在支撑相中的位置(0=支撑相开始,0.5=支撑相结束)
- 0.5-1:在摆动相中的位置(0.5=摆动相开始,1=摆动相结束)
然后sin映射将这个"支撑/摆动位置"转换为带方向的信号。
直观理解 (warping后的foot_indices经过sin映射):
- 当tfoot=0t_{foot} = 0tfoot=0时:sin(0)=0\sin(0) = 0sin(0)=0(支撑相开始)
- 当tfoot=0.25t_{foot} = 0.25tfoot=0.25时:sin(π/2)=1\sin(\pi/2) = 1sin(π/2)=1(支撑相中点,最大值)
- 当tfoot=0.5t_{foot} = 0.5tfoot=0.5时:sin(π)=0\sin(\pi) = 0sin(π)=0(支撑相结束/摆动相开始)
- 当tfoot=0.75t_{foot} = 0.75tfoot=0.75时:sin(3π/2)=−1\sin(3\pi/2) = -1sin(3π/2)=−1(摆动相中点,最小值)
- 当tfoot=1t_{foot} = 1tfoot=1时:sin(2π)=0\sin(2\pi) = 0sin(2π)=0(摆动相结束,等同于周期开始)
注意 :经过warping和sin映射后,clock_inputs确实失去了"时钟"的直观含义,变成了"当前处于支撑相或摆动相的某一位置,以及运动方向"(正负号表示上升/下降趋势)。
波形特点:
- 正弦波是周期性的,完美匹配步态周期的循环特性
- 正弦波是平滑的,没有突然的跳跃,有利于神经网络学习
- 正弦波是对称的,上升和下降部分对称,符合步态的运动特性
4.2.3.3 时钟输入的作用
在策略网络中的使用:
- 策略网络接收4个时钟输入(每条腿一个)
- 通过比较不同腿的时钟输入值,策略可以判断:
- 哪些腿的相位相同(同步运动)
- 哪些腿的相位相差0.5(交替运动)
- 当前处于步态周期的哪个阶段
示例 :在小跑步态中(θcmd=(0.5,0,0)\theta^{cmd} = (0.5, 0, 0)θcmd=(0.5,0,0))
假设当前tgait=0t_{gait} = 0tgait=0,计算每条腿的相位和时钟输入:
步骤1:计算每条腿的相位
根据小跑步态的相位偏移计算:
- FL(左前):tFL=tgait+θ1+θ2+θ3=0+0.5+0+0=0.5t_{FL} = t_{gait} + \theta_1 + \theta_2 + \theta_3 = 0 + 0.5 + 0 + 0 = 0.5tFL=tgait+θ1+θ2+θ3=0+0.5+0+0=0.5
- FR(右前):tFR=tgait+θ2=0+0=0t_{FR} = t_{gait} + \theta_2 = 0 + 0 = 0tFR=tgait+θ2=0+0=0
- RL(左后):tRL=tgait+θ3=0+0=0t_{RL} = t_{gait} + \theta_3 = 0 + 0 = 0tRL=tgait+θ3=0+0=0
- RR(右后):tRR=tgait+θ1=0+0.5=0.5t_{RR} = t_{gait} + \theta_1 = 0 + 0.5 = 0.5tRR=tgait+θ1=0+0.5=0.5
步骤2:计算时钟输入
使用公式clockfoot=sin(2π⋅tfoot)clock_{foot} = \sin(2\pi \cdot t_{foot})clockfoot=sin(2π⋅tfoot):
- FL:clockFL=sin(2π×0.5)=sin(π)=0clock_{FL} = \sin(2\pi \times 0.5) = \sin(\pi) = 0clockFL=sin(2π×0.5)=sin(π)=0
- FR:clockFR=sin(2π×0)=sin(0)=0clock_{FR} = \sin(2\pi \times 0) = \sin(0) = 0clockFR=sin(2π×0)=sin(0)=0
- RL:clockRL=sin(2π×0)=sin(0)=0clock_{RL} = \sin(2\pi \times 0) = \sin(0) = 0clockRL=sin(2π×0)=sin(0)=0
- RR:clockRR=sin(2π×0.5)=sin(π)=0clock_{RR} = \sin(2\pi \times 0.5) = \sin(\pi) = 0clockRR=sin(2π×0.5)=sin(π)=0
结果 :当tgait=0t_{gait} = 0tgait=0时,所有腿的时钟输入都是0,但它们的相位不同(FR和RL为0,FL和RR为0.5)。
当tgait=0.25t_{gait} = 0.25tgait=0.25时:
步骤1:重新计算相位
- FL:tFL=0.25+0.5=0.75t_{FL} = 0.25 + 0.5 = 0.75tFL=0.25+0.5=0.75
- FR:tFR=0.25+0=0.25t_{FR} = 0.25 + 0 = 0.25tFR=0.25+0=0.25
- RL:tRL=0.25+0=0.25t_{RL} = 0.25 + 0 = 0.25tRL=0.25+0=0.25
- RR:tRR=0.25+0.5=0.75t_{RR} = 0.25 + 0.5 = 0.75tRR=0.25+0.5=0.75
步骤2:计算时钟输入
- FL:clockFL=sin(2π×0.75)=sin(3π/2)=−1clock_{FL} = \sin(2\pi \times 0.75) = \sin(3\pi/2) = -1clockFL=sin(2π×0.75)=sin(3π/2)=−1
- FR:clockFR=sin(2π×0.25)=sin(π/2)=1clock_{FR} = \sin(2\pi \times 0.25) = \sin(\pi/2) = 1clockFR=sin(2π×0.25)=sin(π/2)=1
- RL:clockRL=sin(2π×0.25)=sin(π/2)=1clock_{RL} = \sin(2\pi \times 0.25) = \sin(\pi/2) = 1clockRL=sin(2π×0.25)=sin(π/2)=1
- RR:clockRR=sin(2π×0.75)=sin(3π/2)=−1clock_{RR} = \sin(2\pi \times 0.75) = \sin(3\pi/2) = -1clockRR=sin(2π×0.75)=sin(3π/2)=−1
结果:
- FR和RL的时钟输入 = 111(这两条腿处于上升阶段,相位为0.25)
- FL和RR的时钟输入 = −1-1−1(这两条腿处于下降阶段,相位为0.75)
策略网络的识别:
通过比较不同腿的时钟输入值,策略网络可以识别出:
- 同步关系:FR和RL的时钟输入相同(都是1),说明它们同步运动
- 交替关系:FL和RR的时钟输入相同(都是-1),且与FR/RL的符号相反,说明它们交替运动
- 相位差:FR/RL和FL/RR的时钟输入符号相反,说明它们的相位相差0.5(半个周期)
这种信息帮助策略网络理解步态模式,从而生成协调的运动。
代码实现:
858:871:go1_gym/envs/base/legged_robot.py
self.clock_inputs[:, 0] = torch.sin(2 * np.pi * foot_indices[0]) # FL
self.clock_inputs[:, 1] = torch.sin(2 * np.pi * foot_indices[1]) # FR
self.clock_inputs[:, 2] = torch.sin(2 * np.pi * foot_indices[2]) # RL
self.clock_inputs[:, 3] = torch.sin(2 * np.pi * foot_indices[3]) # RR
self.doubletime_clock_inputs[:, 0] = torch.sin(4 * np.pi * foot_indices[0])
self.doubletime_clock_inputs[:, 1] = torch.sin(4 * np.pi * foot_indices[1])
self.doubletime_clock_inputs[:, 2] = torch.sin(4 * np.pi * foot_indices[2])
self.doubletime_clock_inputs[:, 3] = torch.sin(4 * np.pi * foot_indices[3])
self.halftime_clock_inputs[:, 0] = torch.sin(np.pi * foot_indices[0])
self.halftime_clock_inputs[:, 1] = torch.sin(np.pi * foot_indices[1])
self.halftime_clock_inputs[:, 2] = torch.sin(np.pi * foot_indices[2])
self.halftime_clock_inputs[:, 3] = torch.sin(np.pi * foot_indices[3])系统计算了三种频率的时钟输入:
- 标准时钟输入 (
clock_inputs):sin(2π⋅tfoot)\sin(2\pi \cdot t_{foot})sin(2π⋅tfoot),一个完整周期 - 双倍频时钟输入 (
doubletime_clock_inputs):sin(4π⋅tfoot)\sin(4\pi \cdot t_{foot})sin(4π⋅tfoot),两个完整周期,提供更细粒度的时序信息 - 半频时钟输入 (
halftime_clock_inputs):sin(π⋅tfoot)\sin(\pi \cdot t_{foot})sin(π⋅tfoot),半个周期,提供粗粒度的时序信息
这些不同频率的时钟输入提供了多尺度的时序信息 ,有助于解决标准时钟输入的重复值问题(例如,在tfoot=0t_{foot} = 0tfoot=0和tfoot=0.5t_{foot} = 0.5tfoot=0.5时,标准时钟输入都是0,但双倍频时钟输入不同),并帮助策略更好地理解步态周期。
这些时钟输入会被添加到观测向量中,输入到策略网络:
336:338:go1_gym/envs/base/legged_robot.py
if self.cfg.env.observe_clock_inputs:
self.obs_buf = torch.cat((self.obs_buf,
self.clock_inputs), dim=-1)4.2.3.4 期望接触状态与时钟输入的联系与区别
共同的基础:
desired_contact_states和clock_inputs都基于相同的foot_indices计算,它们都表示每条腿在步态周期中的位置,但提供的信息和用途不同:
| 特性 | desired_contact_states |
clock_inputs |
|---|---|---|
| 基础变量 | foot_indices |
foot_indices |
| 计算方式 | 正态分布CDF平滑函数 | 正弦波函数 |
| 数值范围 | 0到1 | -1到1 |
| 主要用途 | 奖励计算(训练时) | 策略输入(推理时) |
| 信息内容 | "是否应该接触地面" | "在周期中的位置和趋势" |
| 函数形状 | 类似平滑方波(0-0.5接近1,0.5-1接近0) | 正弦波(0→1→0→-1→0) |
关键区别分析:
-
函数形状的差异:
-
desired_contact_states:形状类似平滑的方波- 在tfoot=0t_{foot} = 0tfoot=0时:C≈0.5C \approx 0.5C≈0.5(过渡状态)
- 在tfoot=0.25t_{foot} = 0.25tfoot=0.25时:C≈1C \approx 1C≈1(支撑相,脚应该接触地面)
- 在tfoot=0.5t_{foot} = 0.5tfoot=0.5时:C≈0.5C \approx 0.5C≈0.5(过渡状态)
- 在tfoot=0.75t_{foot} = 0.75tfoot=0.75时:C≈0C \approx 0C≈0(摆动相,脚应该离开地面)
- 在tfoot=1t_{foot} = 1tfoot=1时:C≈0.5C \approx 0.5C≈0.5(过渡状态)
-
clock_inputs:标准的正弦波- 在tfoot=0t_{foot} = 0tfoot=0时:sin(0)=0\sin(0) = 0sin(0)=0
- 在tfoot=0.25t_{foot} = 0.25tfoot=0.25时:sin(π/2)=1\sin(\pi/2) = 1sin(π/2)=1
- 在tfoot=0.5t_{foot} = 0.5tfoot=0.5时:sin(π)=0\sin(\pi) = 0sin(π)=0
- 在tfoot=0.75t_{foot} = 0.75tfoot=0.75时:sin(3π/2)=−1\sin(3\pi/2) = -1sin(3π/2)=−1
- 在tfoot=1t_{foot} = 1tfoot=1时:sin(2π)=0\sin(2\pi) = 0sin(2π)=0
-
-
信息内容的差异:
-
desired_contact_states:- 直接回答"这条腿现在应该接触地面吗?"
- 值接近1表示应该接触,值接近0表示应该离开
- 在支撑相(0-0.5)接近1,在摆动相(0.5-1)接近0
- 语义明确:直接对应物理行为(接触/不接触)
-
clock_inputs:- 表示"这条腿在周期中的位置"
- 包含方向信息(正负号表示上升/下降趋势)
- 在0和0.5处都是0(存在重复值问题)
- 时序信息丰富:可以推断运动趋势和速度
-
-
sin函数重复值的问题:
用户正确指出了sin函数确实存在重复值的问题:
- sin(0)=sin(π)=0\sin(0) = \sin(\pi) = 0sin(0)=sin(π)=0(在tfoot=0t_{foot} = 0tfoot=0和tfoot=0.5t_{foot} = 0.5tfoot=0.5时)
- 这意味着仅凭单个时钟输入值,无法区分周期开始(0)和周期中点(0.5)
解决方案:
- 系统使用历史观测(30步)来解决这个问题
- 通过时序信息,策略可以区分"从0开始上升"和"从0.5开始下降"
- 此外,系统还计算了
doubletime_clock_inputs和halftime_clock_inputs,提供不同频率的时钟信号
计算流程总结:
foot_indices (每条腿的相位)
↓
├─→ 通过CDF函数 → desired_contact_states → 用于奖励计算
│ (平滑方波形状,语义:是否应该接触)
│
└─→ 通过sin函数 → clock_inputs → 用于策略输入
(正弦波形状,语义:在周期中的位置和趋势)实际使用示例:
在小跑步态中,当tgait=0t_{gait} = 0tgait=0时:
- FR和RL的相位都是0,所以:
desired_contact_states≈ 0.5(过渡状态,即将进入支撑相)clock_inputs= 0(周期开始)
- FL和RR的相位都是0.5,所以:
desired_contact_states≈ 0.5(过渡状态,即将进入摆动相)clock_inputs= 0(周期中点)
注意 :虽然此时clock_inputs值相同(都是0),但结合历史观测和多频率时钟输入,策略可以区分它们处于周期的不同阶段(一个在上升,一个在下降)。
总结1:为什么使用clock_inputs而不是desired_contact_states作为策略输入? 为什么不在观测中使用desired_contact_states?
虽然desired_contact_states也可以表示每条腿在步态周期中的位置,但系统选择使用clock_inputs(正弦波信号)而不是desired_contact_states作为策略网络的输入,原因如下:
- sin 确实会重复取值(单靠 sin(2πt) 不能唯一确定相位),但这里能用是因为 策略吃的是 30 步历史 + 机器人状态 + 4 条腿一起的节拍,能从"上升/下降趋势"消歧。
desired_contact_states更像"支撑/摆动的门控 mask "(大段时间饱和在 0 或 1),适合做奖励加权;clock_inputs更像"连续节拍器",在半周期内部也持续变化,更适合帮助策略生成平滑的周期动作细节。
代码中的配置:
340:342:go1_gym/envs/base/legged_robot.py
# if self.cfg.env.observe_desired_contact_states:
# self.obs_buf = torch.cat((self.obs_buf,
# self.desired_contact_states), dim=-1)可以看到,observe_desired_contact_states选项被注释掉了,说明系统默认不将desired_contact_states作为观测输入。
总结2:为什么使用sin映射而不是直接使用foot_indices?
既然foot_indices已经是0-1之间的周期性值,为什么不直接将其作为策略输入,而要经过sin函数映射?而且,sin映射后似乎失去了"时钟"的直观含义,变成了"当前处于支撑相或摆动相的某一位置"。
代码中的选项:
实际上,系统确实提供了直接使用foot_indices的选项(observe_timing_parameter),但默认是关闭的:
332:334:go1_gym/envs/base/legged_robot.py
if self.cfg.env.observe_timing_parameter:
self.obs_buf = torch.cat((self.obs_buf,
self.gait_indices.unsqueeze(1)), dim=-1)这个选项会将全局的gait_indices(而不是每条腿的foot_indices)直接添加到观测中。
为什么使用sin映射?
- foot_indices 直接输入的问题:0 和 1 是同一时刻,但数值差巨大
foot_indices ∈ [0,1) 是取模相位:0 和 1 代表同一周期起点。但如果你把它当普通实数输入网络,会出现"几何不一致":
-
真实物理意义上:相位 0.99 和 0.01 非常接近(只差 0.02 个周期)
-
数值上:|0.99 - 0.01| = 0.98 非常远
对 MLP 来说,这会让它很难学出"周期连续"的规律:它得额外学会一个"如果接近 1 也等价于接近 0"的绕行逻辑(本质是学一个环形拓扑),训练更难、更不稳定。
- sin 映射解决的就是这个"断点":把线性相位变成"圆上的连续坐标"
映射:
clock(t)=sin(2πt)clock(t)=sin(2πt)clock(t)=sin(2πt)
看刚才那个例子:
-
t=0.99:sin(2π⋅0.99)=sin(1.98π)≈−0.0628sin(2π⋅0.99)=sin(1.98π)≈−0.0628sin(2π⋅0.99)=sin(1.98π)≈−0.0628
-
t=0.01:sin(2π⋅0.01)=sin(0.02π)≈+0.0628sin(2π⋅0.01)=sin(0.02π)≈+0.0628sin(2π⋅0.01)=sin(0.02π)≈+0.0628
它们在数值上已经变得很接近(幅值都很小),并且跨越周期边界时是连续变化的(从负的小数平滑过到正的小数)。
更本质地说:foot_indices 是"圆周角度 t 的线性刻度",而 sin(2πt) 是把"圆周角度"投影到一个连续坐标轴上------这就是圆周变量的标准表示方式(circular variable encoding / Fourier feature)。虽然直接使用foot_indices在语义上更直观。
4.2.4 其他关键行为参数
- 步频(fcmdf^{cmd}fcmd): 范围2.0, 4.0 Hz,表示每只脚每秒接触次数
- 身体高度命令(hzcmdh^{cmd}_zhzcmd): 范围-0.25, 0.15 m,相对于默认高度0.34m
- 身体俯仰命令(ϕcmd\phi^{cmd}ϕcmd): 范围-0.4, 0.4 rad
- 脚站立宽度命令(sycmds^{cmd}_ysycmd): 范围0.10, 0.45 m
- 脚摆动高度命令(hzf,cmdh^{f,cmd}_zhzf,cmd): 范围0.03, 0.35 m
代码配置:
156:166:scripts/train.py
Cfg.commands.body_height_cmd = [-0.25, 0.15]
Cfg.commands.gait_frequency_cmd_range = [2.0, 4.0]
Cfg.commands.gait_phase_cmd_range = [0.0, 1.0]
Cfg.commands.gait_offset_cmd_range = [0.0, 1.0]
Cfg.commands.gait_bound_cmd_range = [0.0, 1.0]
Cfg.commands.gait_duration_cmd_range = [0.5, 0.5]
Cfg.commands.footswing_height_range = [0.03, 0.35]
Cfg.commands.body_pitch_range = [-0.4, 0.4]
Cfg.commands.body_roll_range = [-0.0, 0.0]
Cfg.commands.stance_width_range = [0.10, 0.45]
Cfg.commands.stance_length_range = [0.35, 0.45]5. 奖励函数设计
奖励函数是实现MoB的核心,分为三类:任务奖励、固定辅助奖励和增强辅助奖励。
5.1 任务奖励 (Task Rewards)
5.1.1 线速度跟踪奖励
公式 :
rvx,ycmd=exp(−∥vxy−vxycmd∥2/σvxy)r^{v^{cmd}{x,y}} = \exp(-\|v{xy} - v^{cmd}{xy}\|^2/\sigma{v_{xy}})rvx,ycmd=exp(−∥vxy−vxycmd∥2/σvxy)
其中σvxy=0.02\sigma_{v_{xy}} = 0.02σvxy=0.02(tracking_sigma)。
代码实现:
15:18:go1_gym/envs/rewards/corl_rewards.py
def _reward_tracking_lin_vel(self):
# Tracking of linear velocity commands (xy axes)
lin_vel_error = torch.sum(torch.square(self.env.commands[:, :2] - self.env.base_lin_vel[:, :2]), dim=1)
return torch.exp(-lin_vel_error / self.env.cfg.rewards.tracking_sigma)5.1.2 角速度跟踪奖励
公式 :
rωzcmd=exp(−(ωz−ωzcmd)2/σωz)r^{\omega^{cmd}_z} = \exp(-(\omega_z - \omega^{cmd}z)^2/\sigma{\omega_z})rωzcmd=exp(−(ωz−ωzcmd)2/σωz)
代码实现:
20:23:go1_gym/envs/rewards/corl_rewards.py
def _reward_tracking_ang_vel(self):
# Tracking of angular velocity commands (yaw)
ang_vel_error = torch.square(self.env.commands[:, 2] - self.env.base_ang_vel[:, 2])
return torch.exp(-ang_vel_error / self.env.cfg.rewards.tracking_sigma_yaw)5.2 固定辅助奖励 (Fixed Auxiliary Rewards)
这些奖励与行为参数无关,旨在提高整体稳定性和sim-to-real迁移能力。
5.2.1 基础稳定性奖励
-
z轴速度惩罚 :
rvz=−0.02×vz2r^{v_z} = -0.02 \times v_z^2rvz=−0.02×vz2代码实现:
25:27:go1_gym/envs/rewards/corl_rewards.pydef _reward_lin_vel_z(self): # Penalize z axis base linear velocity return torch.square(self.env.base_lin_vel[:, 2]) -
滚动-俯仰角速度惩罚 :
rωxy=−0.001×∥ωxy∥2r^{\omega_{xy}} = -0.001 \times \|\omega_{xy}\|^2rωxy=−0.001×∥ωxy∥2代码实现:
29:31:go1_gym/envs/rewards/corl_rewards.pydef _reward_ang_vel_xy(self): # Penalize xy axes base angular velocity return torch.sum(torch.square(self.env.base_ang_vel[:, :2]), dim=1) -
姿态惩罚 :
rorientation=−5.0×∥gproj,xy∥2r^{orientation} = -5.0 \times \|g_{proj,xy}\|^2rorientation=−5.0×∥gproj,xy∥2代码实现:
33:35:go1_gym/envs/rewards/corl_rewards.pydef _reward_orientation(self): # Penalize non flat base orientation return torch.sum(torch.square(self.env.projected_gravity[:, :2]), dim=1)
5.2.2 动作平滑性奖励
-
动作变化率惩罚 (
_reward_action_rate):
raction_rate=−0.01×∥at−1−at∥2r^{action\rate} = -0.01 \times \|a{t-1} - a_t\|^2raction_rate=−0.01×∥at−1−at∥2代码实现:
45:47:go1_gym/envs/rewards/corl_rewards.pydef _reward_action_rate(self): # Penalize changes in actions return torch.sum(torch.square(self.env.last_actions - self.env.actions), dim=1)惩罚相邻时刻动作的变化,鼓励平滑的动作。
-
动作平滑性惩罚(一阶) (
_reward_action_smoothness_1):
rsmoothness_1=−0.1×∥qtarget,t−1−qtarget,t∥2r^{smoothness\1} = -0.1 \times \|q{target,t-1} - q_{target,t}\|^2rsmoothness_1=−0.1×∥qtarget,t−1−qtarget,t∥2代码实现:
94:98:go1_gym/envs/rewards/corl_rewards.pydef _reward_action_smoothness_1(self): # Penalize changes in actions diff = torch.square(self.env.joint_pos_target[:, :self.env.num_actuated_dof] - self.env.last_joint_pos_target[:, :self.env.num_actuated_dof]) diff = diff * (self.env.last_actions[:, :self.env.num_dof] != 0) # ignore first step return torch.sum(diff, dim=1)惩罚相邻时刻目标关节位置的变化,鼓励平滑的动作。
-
动作平滑性惩罚(二阶) (
_reward_action_smoothness_2):
rsmoothness_2=−0.1×∥at−2−2at−1+at∥2r^{smoothness\2} = -0.1 \times \|a{t-2} - 2a_{t-1} + a_t\|^2rsmoothness_2=−0.1×∥at−2−2at−1+at∥2代码实现:
100:105:go1_gym/envs/rewards/corl_rewards.pydef _reward_action_smoothness_2(self): # Penalize changes in actions diff = torch.square(self.env.joint_pos_target[:, :self.env.num_actuated_dof] - 2 * self.env.last_joint_pos_target[:, :self.env.num_actuated_dof] + self.env.last_last_joint_pos_target[:, :self.env.num_actuated_dof]) diff = diff * (self.env.last_actions[:, :self.env.num_dof] != 0) # ignore first step diff = diff * (self.env.last_last_actions[:, :self.env.num_dof] != 0) # ignore second step return torch.sum(diff, dim=1)
5.2.3 脚滑移惩罚
什么是脚滑移? 当脚接触地面时,如果脚在水平方向(x-y平面)有速度,说明脚在滑动。这会导致:
- 能量损失:滑动会产生摩擦,消耗能量
- 控制困难:滑动使机器人难以精确控制位置
- 不稳定:滑动可能导致机器人失去平衡
为什么需要惩罚脚滑移? 在理想情况下,当脚接触地面时,脚应该相对于地面静止(速度为0)。惩罚脚滑移可以鼓励策略学习"将脚牢牢地放在地面上"的行为。
代码实现详解:
107:113:go1_gym/envs/rewards/corl_rewards.py
def _reward_feet_slip(self):
contact = self.env.contact_forces[:, self.env.feet_indices, 2] > 1.
contact_filt = torch.logical_or(contact, self.env.last_contacts)
self.env.last_contacts = contact
foot_velocities = torch.square(torch.norm(self.env.foot_velocities[:, :, 0:2], dim=2).view(self.env.num_envs, -1))
rew_slip = torch.sum(contact_filt * foot_velocities, dim=1)
return rew_slip逐步解释:
-
检测脚是否接触地面:
pythoncontact = self.env.contact_forces[:, self.env.feet_indices, 2] > 1.contact_forces[:, feet_indices, 2]:获取每条脚在z方向(垂直向上)的接触力,feet_indices与之前每条腿的相位foot_indices不同> 1.:如果接触力大于1牛顿,认为脚接触地面contact:一个布尔张量,形状为[num_envs, 4],表示每条脚是否接触地面
-
使用接触状态过滤:
pythoncontact_filt = torch.logical_or(contact, self.env.last_contacts) self.env.last_contacts = contactlast_contacts:上一时刻的接触状态torch.logical_or(contact, self.env.last_contacts):如果当前或上一时刻脚接触地面,都认为脚在接触状态- 为什么这样做? 避免在接触状态切换的瞬间(脚刚接触或刚离开)漏掉惩罚,确保惩罚的连续性
-
计算脚的水平速度:
pythonfoot_velocities = torch.square(torch.norm(self.env.foot_velocities[:, :, 0:2], dim=2).view(self.env.num_envs, -1))foot_velocities[:, :, 0:2]:获取每条脚在x和y方向的速度(水平速度)torch.norm(..., dim=2):计算每条脚的水平速度大小(vx2+vy2\sqrt{v_x^2 + v_y^2}vx2+vy2 )torch.square(...):对速度大小取平方(vxy2v_{xy}^2vxy2).view(self.env.num_envs, -1):重塑为[num_envs, 4]的形状- 结果 :
foot_velocities[i, j]表示第i个环境中第j条脚的水平速度平方
-
计算惩罚:
pythonrew_slip = torch.sum(contact_filt * foot_velocities, dim=1)contact_filt * foot_velocities:只有当脚接触地面时(contact_filt = True),才计算速度惩罚torch.sum(..., dim=1):对4条脚求和,得到每个环境的总惩罚- 结果 :
rew_slip[i]表示第i个环境的脚滑移惩罚
数学表达 :
rslip=∑foot=141contact(foot)×∥vxyfoot∥2r^{slip} = \sum_{foot=1}^{4} \mathbf{1}{contact}(foot) \times \|v^{foot}{xy}\|^2rslip=foot=1∑41contact(foot)×∥vxyfoot∥2
其中1contact(foot)\mathbf{1}_{contact}(foot)1contact(foot)表示脚是否接触地面(1或0)。
奖励权重 :在代码配置中,脚滑移惩罚的权重为-0.04,即:
Rslip=−0.04×rslipR^{slip} = -0.04 \times r^{slip}Rslip=−0.04×rslip
直观理解:
- 当脚接触地面且水平速度为0时:惩罚为0(理想情况)
- 当脚接触地面但水平速度为0.5 m/s时:惩罚为0.04×0.25=0.010.04 \times 0.25 = 0.010.04×0.25=0.01(较小惩罚)
- 当脚接触地面但水平速度为1.0 m/s时:惩罚为0.04×1.0=0.040.04 \times 1.0 = 0.040.04×1.0=0.04(较大惩罚)
- 当脚不接触地面时:无论速度多大,惩罚都为0(因为
contact_filt = False)
5.2.4 关节相关惩罚
-
关节位置惩罚 (
_reward_dof_pos):
rdof_pos=−∑i=112(qi−qdefault,i)2r^{dof\pos} = -\sum{i=1}^{12} (q_i - q_{default,i})^2rdof_pos=−i=1∑12(qi−qdefault,i)2代码实现:
86:88:go1_gym/envs/rewards/corl_rewards.pydef _reward_dof_pos(self): # Penalize dof positions return torch.sum(torch.square(self.env.dof_pos - self.env.default_dof_pos), dim=1)惩罚关节位置偏离默认位置,鼓励机器人保持接近默认姿态。
-
关节速度惩罚 (
_reward_dof_vel):
rdof_vel=−0.0001×∑i=112q˙i2r^{dof\vel} = -0.0001 \times \sum{i=1}^{12} \dot{q}_i^2rdof_vel=−0.0001×i=1∑12q˙i2代码实现:
90:92:go1_gym/envs/rewards/corl_rewards.pydef _reward_dof_vel(self): # Penalize dof velocities return torch.sum(torch.square(self.env.dof_vel), dim=1)惩罚关节速度,鼓励平滑运动。
-
关节加速度惩罚 (
_reward_dof_acc):
rdof_acc=−∑i=112(q˙i,t−1−q˙i,tdt)2r^{dof\acc} = -\sum{i=1}^{12} \left(\frac{\dot{q}{i,t-1} - \dot{q}{i,t}}{dt}\right)^2rdof_acc=−i=1∑12(dtq˙i,t−1−q˙i,t)2代码实现:
41:43:go1_gym/envs/rewards/corl_rewards.pydef _reward_dof_acc(self): # Penalize dof accelerations return torch.sum(torch.square((self.env.last_dof_vel - self.env.dof_vel) / self.env.dt), dim=1)惩罚关节加速度,鼓励更平滑的运动。
-
关节限制违反惩罚 (
_reward_dof_pos_limits):
rdof_limits=−10.0×∑i=1121qi>qmax∥∥qi<qminr^{dof\limits} = -10.0 \times \sum{i=1}^{12} \mathbf{1}{q_i>q{max}\|\|q_i<q_{min}}rdof_limits=−10.0×i=1∑121qi>qmax∥∥qi<qmin代码实现:
54:58:go1_gym/envs/rewards/corl_rewards.pydef _reward_dof_pos_limits(self): # Penalize dof positions too close to the limit out_of_limits = -(self.env.dof_pos - self.env.dof_pos_limits[:, 0]).clip(max=0.) # lower limit out_of_limits += (self.env.dof_pos - self.env.dof_pos_limits[:, 1]).clip(min=0.) return torch.sum(out_of_limits, dim=1)惩罚关节位置超出限制范围。
-
关节扭矩惩罚 (
_reward_torques):
rtorques=−0.0001×∑i=112τi2r^{torques} = -0.0001 \times \sum_{i=1}^{12} \tau_i^2rtorques=−0.0001×i=1∑12τi2代码实现:
37:39:go1_gym/envs/rewards/corl_rewards.pydef _reward_torques(self): # Penalize torques return torch.sum(torch.square(self.env.torques), dim=1)惩罚关节扭矩,鼓励使用较小的力。
5.2.5 碰撞和接触相关惩罚
-
碰撞惩罚 (
_reward_collision):
rcollision=−5.0×∑body1∥fbody∥>0.1r^{collision} = -5.0 \times \sum_{body} \mathbf{1}{\|f{body}\| > 0.1}rcollision=−5.0×body∑1∥fbody∥>0.1代码实现:
49:52:go1_gym/envs/rewards/corl_rewards.pydef _reward_collision(self): # Penalize collisions on selected bodies return torch.sum(1. * (torch.norm(self.env.contact_forces[:, self.env.penalised_contact_indices, :], dim=-1) > 0.1), dim=1)惩罚大腿/小腿等非脚部部位的碰撞。
-
脚接触力过大惩罚 (
_reward_feet_contact_forces):
rcontact_forces=−∑footmax(0,∥ffoot∥−fmax)r^{contact\forces} = -\sum{foot} \max(0, \|f_{foot}\| - f_{max})rcontact_forces=−foot∑max(0,∥ffoot∥−fmax)代码实现:
122:125:go1_gym/envs/rewards/corl_rewards.pydef _reward_feet_contact_forces(self): # penalize high contact forces return torch.sum((torch.norm(self.env.contact_forces[:, self.env.feet_indices, :], dim=-1) - self.env.cfg.rewards.max_contact_force).clip(min=0.), dim=1)惩罚脚部接触力过大,避免过度用力。
-
脚接触速度惩罚 (
_reward_feet_contact_vel):
rcontact_vel=−∑foot1near_ground×∥vfoot∥2r^{contact\vel} = -\sum{foot} \mathbf{1}_{near\_ground} \times \|v^{foot}\|^2rcontact_vel=−foot∑1near_ground×∥vfoot∥2代码实现:
115:120:go1_gym/envs/rewards/corl_rewards.pydef _reward_feet_contact_vel(self): reference_heights = 0 near_ground = self.env.foot_positions[:, :, 2] - reference_heights < 0.03 foot_velocities = torch.square(torch.norm(self.env.foot_velocities[:, :, 0:3], dim=2).view(self.env.num_envs, -1)) rew_contact_vel = torch.sum(near_ground * foot_velocities, dim=1) return rew_contact_vel惩罚脚接近地面时的速度,鼓励脚在接触地面时保持静止。
-
脚冲击速度惩罚 (
_reward_feet_impact_vel):
rimpact_vel=−∑foot1contact×max(0,−vzfoot)2r^{impact\vel} = -\sum{foot} \mathbf{1}_{contact} \times \max(0, -v^{foot}_z)^2rimpact_vel=−foot∑1contact×max(0,−vzfoot)2代码实现:
134:140:go1_gym/envs/rewards/corl_rewards.pydef _reward_feet_impact_vel(self): prev_foot_velocities = self.env.prev_foot_velocities[:, :, 2].view(self.env.num_envs, -1) contact_states = torch.norm(self.env.contact_forces[:, self.env.feet_indices, :], dim=-1) > 1.0 rew_foot_impact_vel = contact_states * torch.square(torch.clip(prev_foot_velocities, -100, 0)) return torch.sum(rew_foot_impact_vel, dim=1)惩罚脚接触地面时的向下冲击速度,鼓励轻柔落地。
5.3 增强辅助奖励 (Augmented Auxiliary Rewards)
这些奖励与行为参数直接相关,用于强制策略按照指定的行为参数执行。
5.3.1 摆动相位跟踪奖励(力)
问题背景:在步态周期中,每条腿都有两个阶段:
- 支撑相:脚应该接触地面,产生接触力
- 摆动相:脚应该离开地面,不应该有接触力
为什么需要这个奖励? 如果策略在摆动相时脚仍然接触地面,说明:
- 脚没有及时抬起,可能导致绊倒
- 步态模式不正确,无法实现期望的步态
- 能量效率低,脚在地面上拖行会产生摩擦
目标:当脚应该处于摆动阶段时,鼓励零接触力。
代码实现详解:
67:75:go1_gym/envs/rewards/corl_rewards.py
def _reward_tracking_contacts_shaped_force(self):
foot_forces = torch.norm(self.env.contact_forces[:, self.env.feet_indices, :], dim=-1)
desired_contact = self.env.desired_contact_states
reward = 0
for i in range(4):
reward += - (1 - desired_contact[:, i]) * (
1 - torch.exp(-1 * foot_forces[:, i] ** 2 / self.env.cfg.rewards.gait_force_sigma))
return reward / 4逐步解释:
-
计算每条脚的接触力大小:
pythonfoot_forces = torch.norm(self.env.contact_forces[:, self.env.feet_indices, :], dim=-1)contact_forces[:, feet_indices, :]:获取每条脚的3维接触力向量(x, y, z方向)torch.norm(..., dim=-1):计算每条脚的接触力大小(fx2+fy2+fz2\sqrt{f_x^2 + f_y^2 + f_z^2}fx2+fy2+fz2 )- 结果 :
foot_forces[i, j]表示第i个环境中第j条脚的接触力大小(单位:牛顿)
-
获取期望接触状态:
pythondesired_contact = self.env.desired_contact_statesdesired_contact[i, j]:第i个环境中第j条脚的期望接触状态(0到1之间)- 接近1表示应该接触地面,接近0表示应该离开地面
-
对每条脚计算奖励:
pythonfor i in range(4): reward += - (1 - desired_contact[:, i]) * ( 1 - torch.exp(-1 * foot_forces[:, i] ** 2 / self.env.cfg.rewards.gait_force_sigma))让我们逐步分解这个公式:
a.
(1 - desired_contact[:, i]):- 当
desired_contact = 0(应该摆动)时,这个值为1,会计算惩罚 - 当
desired_contact = 1(应该支撑)时,这个值为0,不会计算惩罚 - 作用:只在摆动相时计算奖励
b.
foot_forces[:, i] ** 2:- 接触力的平方
c.
torch.exp(-1 * foot_forces[:, i] ** 2 / gait_force_sigma):gait_force_sigma = 100.0:控制惩罚的陡峭程度- 这是一个指数衰减函数 :
- 当
foot_forces = 0时:exp(0) = 1 - 当
foot_forces = 10时:exp(-100/100) = exp(-1) ≈ 0.37 - 当
foot_forces = 20时:exp(-400/100) = exp(-4) ≈ 0.018
- 当
- 特点:接触力越大,这个值越小(接近0)
d.
1 - torch.exp(...):- 当接触力为0时:
1 - 1 = 0(无惩罚,理想情况) - 当接触力为10N时:
1 - 0.37 = 0.63(中等惩罚) - 当接触力为20N时:
1 - 0.018 = 0.982(大惩罚) - 特点:接触力越大,惩罚越大,但惩罚有上限(最大为1)
e.
- (1 - desired_contact) * (1 - exp(...)):- 负号表示这是惩罚(奖励为负)
- 只在摆动相时(
1 - desired_contact = 1)计算惩罚 - 惩罚大小取决于接触力
- 当
-
平均化:
pythonreturn reward / 4- 将4条脚的奖励求和后除以4,得到平均奖励
数学表达 :
rcfcmd=−14∑foot=141−Cfootcmd×(1−exp(−∥ffoot∥2σcf))r^{c^{cmd}f} = -\frac{1}{4} \sum{foot=1}^{4} 1 - C\^{cmd}_{foot} \times \left(1 - \exp\left(-\frac{\|f_{foot}\|^2}{\sigma_{cf}}\right)\right)rcfcmd=−41foot=1∑41−Cfootcmd×(1−exp(−σcf∥ffoot∥2))
其中:
- CfootcmdC^{cmd}_{foot}Cfootcmd:期望接触状态(0到1)
- ffootf_{foot}ffoot:实际接触力向量
- σcf=100.0\sigma_{cf} = 100.0σcf=100.0:
gait_force_sigma
奖励权重 :在代码配置中,这个奖励的权重为-0.08,即:
Rcfcmd=−0.08×rcfcmdR^{c^{cmd}_f} = -0.08 \times r^{c^{cmd}_f}Rcfcmd=−0.08×rcfcmd
直观理解(以一条脚为例):
-
情况1 :脚应该摆动(
desired_contact = 0),实际接触力为0N- 奖励 = −0.08×1×(1−1)=0-0.08 \times 1 \times (1 - 1) = 0−0.08×1×(1−1)=0(无惩罚,理想情况)
-
情况2 :脚应该摆动(
desired_contact = 0),实际接触力为10N- 奖励 = −0.08×1×(1−0.37)=−0.05-0.08 \times 1 \times (1 - 0.37) = -0.05−0.08×1×(1−0.37)=−0.05(中等惩罚)
-
情况3 :脚应该摆动(
desired_contact = 0),实际接触力为20N- 奖励 = −0.08×1×(1−0.018)=−0.078-0.08 \times 1 \times (1 - 0.018) = -0.078−0.08×1×(1−0.018)=−0.078(大惩罚)
-
情况4 :脚应该支撑(
desired_contact = 1),无论接触力多大- 奖励 = −0.08×0×(...)=0-0.08 \times 0 \times (...) = 0−0.08×0×(...)=0(不计算惩罚,因为这是支撑相)
为什么使用指数函数而不是线性函数?
- 指数函数提供了平滑的惩罚曲线,避免在接触力很小时产生过大的梯度
- 当接触力接近0时,惩罚也接近0,有利于策略学习"完全抬起脚"的行为
- 当接触力很大时,惩罚接近上限,避免过度惩罚导致训练不稳定
5.3.2 支撑相位跟踪奖励(速度)
问题背景:在步态周期中,当脚处于支撑相时,脚应该:
- 接触地面
- 相对于地面保持静止(速度为0)
为什么需要这个奖励? 如果策略在支撑相时脚在地面上滑动,说明:
- 脚没有牢牢抓住地面,可能导致打滑
- 步态模式不正确,无法实现稳定的支撑
- 能量效率低,滑动会产生摩擦损失
目标:当脚应该处于支撑阶段时,鼓励脚在地面上保持静止(水平速度为0)。
代码实现详解:
77:84:go1_gym/envs/rewards/corl_rewards.py
def _reward_tracking_contacts_shaped_vel(self):
foot_velocities = torch.norm(self.env.foot_velocities, dim=2).view(self.env.num_envs, -1)
desired_contact = self.env.desired_contact_states
reward = 0
for i in range(4):
reward += - (desired_contact[:, i] * (
1 - torch.exp(-1 * foot_velocities[:, i] ** 2 / self.env.cfg.rewards.gait_vel_sigma)))
return reward / 4逐步解释:
-
计算每条脚的速度大小:
pythonfoot_velocities = torch.norm(self.env.foot_velocities, dim=2).view(self.env.num_envs, -1)foot_velocities:每条脚的3维速度向量(x, y, z方向)torch.norm(..., dim=2):计算每条脚的速度大小(vx2+vy2+vz2\sqrt{v_x^2 + v_y^2 + v_z^2}vx2+vy2+vz2 ).view(self.env.num_envs, -1):重塑为[num_envs, 4]的形状- 结果 :
foot_velocities[i, j]表示第i个环境中第j条脚的速度大小(单位:m/s)
-
获取期望接触状态:
pythondesired_contact = self.env.desired_contact_states- 与摆动相位跟踪奖励相同,
desired_contact[i, j]表示第i个环境中第j条脚的期望接触状态
- 与摆动相位跟踪奖励相同,
-
对每条脚计算奖励:
pythonfor i in range(4): reward += - (desired_contact[:, i] * ( 1 - torch.exp(-1 * foot_velocities[:, i] ** 2 / self.env.cfg.rewards.gait_vel_sigma)))让我们逐步分解这个公式:
a.
desired_contact[:, i]:- 当
desired_contact = 1(应该支撑)时,这个值为1,会计算惩罚 - 当
desired_contact = 0(应该摆动)时,这个值为0,不会计算惩罚 - 作用:只在支撑相时计算奖励
b.
foot_velocities[:, i] ** 2:- 脚速度的平方
c.
torch.exp(-1 * foot_velocities[:, i] ** 2 / gait_vel_sigma):gait_vel_sigma = 10.0:控制惩罚的陡峭程度(注意:这个值比gait_force_sigma小,说明对速度更敏感)- 这是一个指数衰减函数 :
- 当
foot_velocities = 0时:exp(0) = 1 - 当
foot_velocities = 1 m/s时:exp(-1/10) = exp(-0.1) ≈ 0.90 - 当
foot_velocities = 2 m/s时:exp(-4/10) = exp(-0.4) ≈ 0.67 - 当
foot_velocities = 3 m/s时:exp(-9/10) = exp(-0.9) ≈ 0.41
- 当
- 特点:速度越大,这个值越小(接近0)
d.
1 - torch.exp(...):- 当速度为0时:
1 - 1 = 0(无惩罚,理想情况) - 当速度为1 m/s时:
1 - 0.90 = 0.10(小惩罚) - 当速度为2 m/s时:
1 - 0.67 = 0.33(中等惩罚) - 当速度为3 m/s时:
1 - 0.41 = 0.59(大惩罚) - 特点:速度越大,惩罚越大,但惩罚有上限(最大为1)
e.
- desired_contact * (1 - exp(...)):- 负号表示这是惩罚(奖励为负)
- 只在支撑相时(
desired_contact = 1)计算惩罚 - 惩罚大小取决于脚的速度
- 当
-
平均化:
pythonreturn reward / 4- 将4条脚的奖励求和后除以4,得到平均奖励
数学表达 :
rcvcmd=−14∑foot=14Cfootcmd×(1−exp(−∥vfoot∥2σcv))r^{c^{cmd}v} = -\frac{1}{4} \sum{foot=1}^{4} C^{cmd}{foot} \times \left(1 - \exp\left(-\frac{\|v^{foot}\|^2}{\sigma{cv}}\right)\right)rcvcmd=−41foot=1∑4Cfootcmd×(1−exp(−σcv∥vfoot∥2))
其中:
- CfootcmdC^{cmd}_{foot}Cfootcmd:期望接触状态(0到1)
- vfootv^{foot}vfoot:实际脚速度向量
- σcv=10.0\sigma_{cv} = 10.0σcv=10.0:
gait_vel_sigma
奖励权重 :在代码配置中,这个奖励的权重为-0.08,即:
Rcvcmd=−0.08×rcvcmdR^{c^{cmd}_v} = -0.08 \times r^{c^{cmd}_v}Rcvcmd=−0.08×rcvcmd
直观理解(以一条脚为例):
-
情况1 :脚应该支撑(
desired_contact = 1),实际速度为0 m/s- 奖励 = −0.08×1×(1−1)=0-0.08 \times 1 \times (1 - 1) = 0−0.08×1×(1−1)=0(无惩罚,理想情况)
-
情况2 :脚应该支撑(
desired_contact = 1),实际速度为1 m/s- 奖励 = −0.08×1×(1−0.90)=−0.008-0.08 \times 1 \times (1 - 0.90) = -0.008−0.08×1×(1−0.90)=−0.008(小惩罚)
-
情况3 :脚应该支撑(
desired_contact = 1),实际速度为2 m/s- 奖励 = −0.08×1×(1−0.67)=−0.026-0.08 \times 1 \times (1 - 0.67) = -0.026−0.08×1×(1−0.67)=−0.026(中等惩罚)
-
情况4 :脚应该支撑(
desired_contact = 1),实际速度为3 m/s- 奖励 = −0.08×1×(1−0.41)=−0.047-0.08 \times 1 \times (1 - 0.41) = -0.047−0.08×1×(1−0.41)=−0.047(大惩罚)
-
情况5 :脚应该摆动(
desired_contact = 0),无论速度多大- 奖励 = −0.08×0×(...)=0-0.08 \times 0 \times (...) = 0−0.08×0×(...)=0(不计算惩罚,因为这是摆动相)
为什么gait_vel_sigma比gait_force_sigma小?
gait_vel_sigma = 10.0(速度)gait_force_sigma = 100.0(力)- 原因:速度的测量更直接、更准确,所以可以使用更小的sigma值,使惩罚更敏感
- 力的测量可能受到噪声影响,使用较大的sigma值可以提供更平滑的惩罚曲线
5.3.3 身体高度跟踪奖励
公式 :
rhzcmd=−(hz−(hzcmd+htarget))2r^{h^{cmd}_z} = -(h_z - (h^{cmd}z + h{target}))^2rhzcmd=−(hz−(hzcmd+htarget))2
其中htarget=0.30h_{target} = 0.30htarget=0.30 m是基础高度目标。
代码实现:
60:65:go1_gym/envs/rewards/corl_rewards.py
def _reward_jump(self):
reference_heights = 0
body_height = self.env.base_pos[:, 2] - reference_heights
jump_height_target = self.env.commands[:, 3] + self.env.cfg.rewards.base_height_target
reward = - torch.square(body_height - jump_height_target)
return reward说明:这个奖励鼓励机器人将身体高度调整到命令指定的高度(相对于基础高度0.30m)。
#### 5.3.4 Raibert启发式脚放置奖励
##### 5.3.4.1 什么是Raibert启发式?
**Raibert启发式(Raibert Heuristic)**是由Marc Raibert在1980年代提出的一个经典的四足机器人控制算法。它的核心思想是:**为了保持平衡和实现期望速度,脚应该放在哪里?**
**核心问题**:当机器人想要以某个速度移动时,脚应该放在什么位置才能:
1. 保持身体平衡
2. 实现期望的移动速度
3. 为下一步运动做好准备
##### 5.3.4.2 基本原理
**直观理解**:想象你在跑步时:
- 如果你想加速,你会把脚放在身体**后面**一点,这样身体会向前倾斜,产生向前的力
- 如果你想减速,你会把脚放在身体**前面**一点,这样身体会向后倾斜,产生向后的力
- 如果你想保持匀速,你会把脚放在身体**正下方**
**数学表达**:Raibert启发式的基本公式是:
$$p^{desired}_{foot} = p^{nominal}_{foot} + K \times (v^{desired} - v^{current}) \times T_{stance}$$
其中:
- $p^{nominal}_{foot}$:脚的标称位置(静止站立时的位置)
- $v^{desired}$:期望速度
- $v^{current}$:当前速度
- $T_{stance}$:支撑相持续时间
- $K$:比例系数
**物理意义**:
- 如果当前速度小于期望速度,脚应该放在标称位置**后面**,帮助加速
- 如果当前速度大于期望速度,脚应该放在标称位置**前面**,帮助减速
- 偏移量 = 速度差 × 支撑时间
##### 5.3.4.3 在本系统中的实现
系统使用Raibert启发式来计算**期望的脚放置位置**,然后通过奖励函数鼓励策略将脚放在这个位置。
**步骤1:计算基础站立位置**
首先,根据行为参数中的站立宽度$s^{cmd}_y$和站立长度,计算四条腿的标称位置(在机器人本体坐标系中):从上方俯视(机器人本体坐标系):
前
FL ● ● FR
-----|-----
RL ● ● RR
后
- **站立宽度**:左右脚之间的距离($s^{cmd}_y$)
- **站立长度**:前后脚之间的距离(默认0.45m)
标称位置:
- FR(右前):$(L/2, s^{cmd}_y/2)$
- FL(左前):$(L/2, -s^{cmd}_y/2)$
- RR(右后):$(-L/2, s^{cmd}_y/2)$
- RL(左后):$(-L/2, -s^{cmd}_y/2)$
**代码实现**:
```877:889:go1_gym/envs/rewards/corl_rewards.py
if self.env.cfg.commands.num_commands >= 13:
desired_stance_width = self.env.commands[:, 12:13]
desired_ys_nom = torch.cat([desired_stance_width / 2, -desired_stance_width / 2, desired_stance_width / 2, -desired_stance_width / 2], dim=1)
else:
desired_stance_width = 0.3
desired_ys_nom = torch.tensor([desired_stance_width / 2, -desired_stance_width / 2, desired_stance_width / 2, -desired_stance_width / 2], device=self.env.device).unsqueeze(0)
if self.env.cfg.commands.num_commands >= 14:
desired_stance_length = self.env.commands[:, 13:14]
desired_xs_nom = torch.cat([desired_stance_length / 2, desired_stance_length / 2, -desired_stance_length / 2, -desired_stance_length / 2], dim=1)
else:
desired_stance_length = 0.45
desired_xs_nom = torch.tensor([desired_stance_length / 2, desired_stance_length / 2, -desired_stance_length / 2, -desired_stance_length / 2], device=self.env.device).unsqueeze(0)步骤2:计算速度相关的偏移
根据期望速度和当前步态相位,计算脚的偏移量:
X方向(前后)偏移 :
Δx=phase×vxcmd×0.5fcmd\Delta x = phase \times v^{cmd}_x \times \frac{0.5}{f^{cmd}}Δx=phase×vxcmd×fcmd0.5
其中:
- phasephasephase:当前腿的相位(-0.5到0.5之间,支撑相为负,摆动相为正)
- vxcmdv^{cmd}_xvxcmd:期望的前进速度
- fcmdf^{cmd}fcmd:步频
- 0.5fcmd\frac{0.5}{f^{cmd}}fcmd0.5:支撑相持续时间(假设支撑相占50%周期)
物理意义:
- 当腿处于支撑相时(phase<0phase < 0phase<0),如果期望前进,脚应该放在标称位置后面 (Δx<0\Delta x < 0Δx<0),帮助推动身体前进
- 当腿处于摆动相时(phase>0phase > 0phase>0),脚应该放在标称位置前面 (Δx>0\Delta x > 0Δx>0),为下一步做准备
Y方向(左右)偏移 (用于转弯):
Δy=phase×ωzcmd×L2×0.5fcmd\Delta y = phase \times \omega^{cmd}_z \times \frac{L}{2} \times \frac{0.5}{f^{cmd}}Δy=phase×ωzcmd×2L×fcmd0.5
其中:
- ωzcmd\omega^{cmd}_zωzcmd:期望的偏航角速度(转弯速度)
- L2\frac{L}{2}2L:站立长度的一半(转弯半径)
物理意义:
- 当期望左转时(ωzcmd>0\omega^{cmd}_z > 0ωzcmd>0),右腿应该放在更外侧,左腿放在更内侧
- 当期望右转时(ωzcmd<0\omega^{cmd}_z < 0ωzcmd<0),左腿应该放在更外侧,右腿放在更内侧
代码实现:
891:902:go1_gym/envs/rewards/corl_rewards.py
# raibert offsets
phases = torch.abs(1.0 - (self.env.foot_indices * 2.0)) * 1.0 - 0.5
frequencies = self.env.commands[:, 4]
x_vel_des = self.env.commands[:, 0:1]
yaw_vel_des = self.env.commands[:, 2:3]
y_vel_des = yaw_vel_des * desired_stance_length / 2
desired_ys_offset = phases * y_vel_des * (0.5 / frequencies.unsqueeze(1))
desired_ys_offset[:, 2:4] *= -1 # 后腿的y方向偏移取反
desired_xs_offset = phases * x_vel_des * (0.5 / frequencies.unsqueeze(1))
desired_ys_nom = desired_ys_nom + desired_ys_offset
desired_xs_nom = desired_xs_nom + desired_xs_offset步骤3:计算期望脚位置
期望脚位置 = 标称位置 + 速度偏移:
pfootdesired=pfootnominal+Δx,Δyp^{desired}{foot} = p^{nominal}{foot} + \\Delta x, \\Delta ypfootdesired=pfootnominal+Δx,Δy
步骤4:计算奖励
奖励函数惩罚实际脚位置与期望位置的偏差:
公式 :
rraibert=−10.0×∑foot∥pfootactual−pfootdesired∥2r^{raibert} = -10.0 \times \sum_{foot} \|p^{actual}{foot} - p^{desired}{foot}\|^2rraibert=−10.0×foot∑∥pfootactual−pfootdesired∥2
代码实现:
904:910:go1_gym/envs/rewards/corl_rewards.py
desired_footsteps_body_frame = torch.cat((desired_xs_nom.unsqueeze(2), desired_ys_nom.unsqueeze(2)), dim=2)
err_raibert_heuristic = torch.abs(desired_footsteps_body_frame - footsteps_in_body_frame[:, :, 0:2])
reward = torch.sum(torch.square(err_raibert_heuristic), dim=(1, 2))
return reward5.3.4.4 为什么使用Raibert启发式?
问题:为什么不简单地固定脚的位置?
答案:固定脚位置会导致以下问题:
- 无法适应速度变化:当机器人需要加速或减速时,固定位置无法提供必要的力
- 转弯困难:固定位置无法实现有效的转弯
- 平衡问题:在动态运动中,固定位置可能导致不平衡
Raibert启发式的优势:
- 物理合理:基于倒立摆模型,符合物理规律
- 自适应:根据期望速度自动调整脚位置
- 简单有效:计算简单,但效果显著
在本系统中的作用:
- 通过奖励函数,策略学习将脚放在Raibert启发式计算的位置
- 这样策略既能完成速度跟踪任务,又能保持平衡
- 同时考虑了行为参数(如站立宽度),使步态更加多样化
5.3.5 脚摆动高度跟踪奖励
公式 :
rhzf,cmd=−30.0×∑foot(hzf−hzf,cmd)2×(1−Cfootcmd)r^{h^{f,cmd}z} = -30.0 \times \sum{foot} (h^f_z - h^{f,cmd}z)^2 \times (1 - C^{cmd}{foot})rhzf,cmd=−30.0×foot∑(hzf−hzf,cmd)2×(1−Cfootcmd)
仅在摆动阶段(1−Cfootcmd=11 - C^{cmd}_{foot} = 11−Cfootcmd=1)惩罚脚高度偏差。
代码实现:
127:132:go1_gym/envs/rewards/corl_rewards.py
def _reward_feet_clearance_cmd_linear(self):
phases = 1 - torch.abs(1.0 - torch.clip((self.env.foot_indices * 2.0) - 1.0, 0.0, 1.0) * 2.0)
foot_height = (self.env.foot_positions[:, :, 2]).view(self.env.num_envs, -1)# - reference_heights
target_height = self.env.commands[:, 9].unsqueeze(1) * phases + 0.02 # offset for foot radius 2cm
rew_foot_clearance = torch.square(target_height - foot_height) * (1 - self.env.desired_contact_states)
return torch.sum(rew_foot_clearance, dim=1)5.3.6 身体俯仰跟踪奖励
公式 :
rϕcmd=−5.0×(ϕ−ϕcmd)2r^{\phi^{cmd}} = -5.0 \times (\phi - \phi^{cmd})^2rϕcmd=−5.0×(ϕ−ϕcmd)2
代码实现:
148:159:go1_gym/envs/rewards/corl_rewards.py
def _reward_orientation_control(self):
# Penalize non flat base orientation
roll_pitch_commands = self.env.commands[:, 10:12]
quat_roll = quat_from_angle_axis(-roll_pitch_commands[:, 1],
torch.tensor([1, 0, 0], device=self.env.device, dtype=torch.float))
quat_pitch = quat_from_angle_axis(-roll_pitch_commands[:, 0],
torch.tensor([0, 1, 0], device=self.env.device, dtype=torch.float))
desired_base_quat = quat_mul(quat_roll, quat_pitch)
desired_projected_gravity = quat_rotate_inverse(desired_base_quat, self.env.gravity_vec)
return torch.sum(torch.square(self.env.projected_gravity[:, :2] - desired_projected_gravity[:, :2]), dim=1)5.4 奖励组合策略
为防止辅助奖励压倒任务奖励,系统采用创新的奖励组合方式:
rtotal=rtask×exp(caux×raux)r_{total} = r_{task} \times \exp(c_{aux} \times r_{aux})rtotal=rtask×exp(caux×raux)
其中:
- rtaskr_{task}rtask:任务奖励的总和(正值)
- rauxr_{aux}raux:辅助奖励的总和(负值)
- caux=0.02c_{aux} = 0.02caux=0.02:缩放参数
代码配置:
146:149:scripts/train.py
Cfg.rewards.only_positive_rewards = False
Cfg.rewards.only_positive_rewards_ji22_style = True
Cfg.rewards.sigma_rew_neg = 0.02这种设计确保:
- 机器人总是因任务进展而获得奖励
- 当辅助目标被满足时获得更多奖励
- 当辅助目标不满足时获得较少奖励,但不会完全抵消任务进展
5.5 奖励函数完整总结
5.5.1 任务奖励 (Task Rewards)
| 奖励函数 | 代码函数名 | 权重 | 参数值 | 是否使用 | 说明 |
|---|---|---|---|---|---|
| 线速度跟踪 | _reward_tracking_lin_vel |
1.0 | tracking_sigma = 0.02 |
✓ | 跟踪x-y方向线速度命令 |
| 角速度跟踪 | _reward_tracking_ang_vel |
0.5 | tracking_sigma_yaw |
✓ | 跟踪yaw角速度命令 |
5.5.2 固定辅助奖励 (Fixed Auxiliary Rewards)
| 奖励函数 | 代码函数名 | 权重 | 参数值 | 是否使用 | 说明 |
|---|---|---|---|---|---|
| z轴速度惩罚 | _reward_lin_vel_z |
-0.02 | - | ✓ | 惩罚垂直方向速度 |
| 滚动-俯仰角速度惩罚 | _reward_ang_vel_xy |
-0.001 | - | ✓ | 惩罚滚动和俯仰角速度 |
| 姿态惩罚 | _reward_orientation |
0.0 | - | ✗ | 惩罚非水平姿态(未使用) |
| 动作变化率惩罚 | _reward_action_rate |
-0.01 | - | ✓ | 惩罚动作变化 |
| 动作平滑性1 | _reward_action_smoothness_1 |
-0.1 | - | ✓ | 惩罚一阶动作变化 |
| 动作平滑性2 | _reward_action_smoothness_2 |
-0.1 | - | ✓ | 惩罚二阶动作变化 |
| 脚滑移惩罚 | _reward_feet_slip |
-0.04 | - | ✓ | 惩罚脚接触地面时的水平速度 |
| 关节位置惩罚 | _reward_dof_pos |
0.0 | - | ✗ | 惩罚关节位置偏离默认值(未使用) |
| 关节速度惩罚 | _reward_dof_vel |
-0.0001 | - | ✓ | 惩罚关节速度 |
| 关节加速度惩罚 | _reward_dof_acc |
- | - | ✗ | 惩罚关节加速度(未使用) |
| 关节限制违反惩罚 | _reward_dof_pos_limits |
-10.0 | - | ✓ | 惩罚关节位置超出限制 |
| 关节扭矩惩罚 | _reward_torques |
-0.0001 | - | ✓ | 惩罚关节扭矩 |
| 碰撞惩罚 | _reward_collision |
-5.0 | - | ✓ | 惩罚非脚部部位碰撞 |
| 脚接触力过大惩罚 | _reward_feet_contact_forces |
0.0 | max_contact_force |
✗ | 惩罚脚接触力过大(未使用) |
| 脚接触速度惩罚 | _reward_feet_contact_vel |
- | - | ✗ | 惩罚脚接近地面时的速度(未使用) |
| 脚冲击速度惩罚 | _reward_feet_impact_vel |
0.0 | - | ✗ | 惩罚脚落地冲击速度(未使用) |
5.5.3 增强辅助奖励 (Augmented Auxiliary Rewards)
| 奖励函数 | 代码函数名 | 权重 | 参数值 | 是否使用 | 说明 |
|---|---|---|---|---|---|
| 身体高度跟踪 | _reward_jump |
10.0 | base_height_target = 0.30 m |
✓ | 跟踪身体高度命令 |
| 摆动相位跟踪(力) | _reward_tracking_contacts_shaped_force |
4.0 | gait_force_sigma = 100.0 |
✓ | 摆动相时鼓励零接触力 |
| 支撑相位跟踪(速度) | _reward_tracking_contacts_shaped_vel |
4.0 | gait_vel_sigma = 10.0 |
✓ | 支撑相时鼓励脚静止 |
| 脚摆动高度跟踪 | _reward_feet_clearance_cmd_linear |
-30.0 | - | ✓ | 跟踪脚摆动高度命令 |
| 身体姿态控制 | _reward_orientation_control |
-5.0 | - | ✓ | 跟踪身体俯仰和滚动角命令 |
| Raibert启发式 | _reward_raibert_heuristic |
-10.0 | - | ✓ | 鼓励脚放在Raibert启发式计算的位置 |
注意:
- 权重为0.0或未列出的奖励函数在训练中未使用
- 所有使用的奖励函数权重都在
scripts/train.py中配置 - 增强辅助奖励的权重通常较大,因为它们直接关系到行为参数的执行
6. 训练过程
6.1 策略架构
- 主策略网络(Body):三层MLP,隐藏层大小512, 256, 128,使用ELU激活函数
- 域参数估计器(Adaptation Module):两层MLP,隐藏层大小256, 128,使用ELU激活函数,用于预测机器人速度和地面摩擦
- 输入:30步历史观察(2100维)+ 潜在变量(2维,来自adaptation module)
- 输出:12个关节的目标位置偏移
6.2 训练配置
关键训练参数(代码配置):
78:90:scripts/train.py
Cfg.env.num_privileged_obs = 2
Cfg.env.num_observation_history = 30
Cfg.reward_scales.feet_contact_forces = 0.0
Cfg.domain_rand.rand_interval_s = 4
Cfg.commands.num_commands = 15
Cfg.env.observe_two_prev_actions = True
Cfg.env.observe_yaw = False
Cfg.env.num_observations = 70
Cfg.env.num_scalar_observations = 70
Cfg.env.observe_gait_commands = True
Cfg.env.observe_timing_parameter = False
Cfg.env.observe_clock_inputs = True6.3 域随机化
为提高sim-to-real迁移能力,系统随机化以下参数:
代码配置:
30:70:scripts/train.py
Cfg.domain_rand.lag_timesteps = 6
Cfg.domain_rand.randomize_lag_timesteps = True
Cfg.control.control_type = "actuator_net"
Cfg.domain_rand.randomize_rigids_after_start = False
Cfg.env.priv_observe_motion = False
Cfg.env.priv_observe_gravity_transformed_motion = False
Cfg.domain_rand.randomize_friction_indep = False
Cfg.env.priv_observe_friction_indep = False
Cfg.domain_rand.randomize_friction = True
Cfg.env.priv_observe_friction = True
Cfg.domain_rand.friction_range = [0.1, 3.0]
Cfg.domain_rand.randomize_restitution = True
Cfg.env.priv_observe_restitution = True
Cfg.domain_rand.restitution_range = [0.0, 0.4]
Cfg.domain_rand.randomize_base_mass = True
Cfg.env.priv_observe_base_mass = False
Cfg.domain_rand.added_mass_range = [-1.0, 3.0]
Cfg.domain_rand.randomize_gravity = True
Cfg.domain_rand.gravity_range = [-1.0, 1.0]
Cfg.domain_rand.gravity_rand_interval_s = 8.0
Cfg.domain_rand.gravity_impulse_duration = 0.99
Cfg.env.priv_observe_gravity = False
Cfg.domain_rand.randomize_com_displacement = False
Cfg.domain_rand.com_displacement_range = [-0.15, 0.15]
Cfg.env.priv_observe_com_displacement = False
Cfg.domain_rand.randomize_ground_friction = True
Cfg.env.priv_observe_ground_friction = False
Cfg.env.priv_observe_ground_friction_per_foot = False
Cfg.domain_rand.ground_friction_range = [0.0, 0.0]
Cfg.domain_rand.randomize_motor_strength = True
Cfg.domain_rand.motor_strength_range = [0.9, 1.1]
Cfg.env.priv_observe_motor_strength = False
Cfg.domain_rand.randomize_motor_offset = True
Cfg.domain_rand.motor_offset_range = [-0.02, 0.02]
Cfg.env.priv_observe_motor_offset = False6.3.1 域随机化参数完整列表
| 参数类别 | 参数名称 | 随机化范围 | 是否启用 | 是否作为特权观测 | 说明 |
|---|---|---|---|---|---|
| 系统延迟 | lag_timesteps |
6步 | ✓ | - | 控制延迟时间步数 |
| 物理属性 | |||||
| 基座质量 | added_mass_range |
-1.0, 3.0 kg | ✓ | ✗ | 添加到基座的质量 |
| 重心偏移 | com_displacement_range |
-0.15, 0.15 m | ✗ | ✗ | 重心位置偏移(未启用) |
| 地面属性 | |||||
| 地面摩擦 | friction_range |
0.1, 3.0 | ✓ | ✓ | 地面摩擦系数 |
| 地面恢复系数 | restitution_range |
0.0, 0.4 | ✓ | ✓ | 地面弹性恢复系数 |
| 地面摩擦(独立) | - | - | ✗ | ✗ | 每只脚独立摩擦(未启用) |
| 地面摩擦(全局) | ground_friction_range |
0.0, 0.0 | ✓ | ✗ | 全局地面摩擦(范围为零,实际未随机化) |
| 电机属性 | |||||
| 电机强度 | motor_strength_range |
0.9, 1.1 | ✓ | ✗ | 电机扭矩缩放因子 |
| 电机位置偏移 | motor_offset_range |
-0.02, 0.02 rad | ✓ | ✗ | 电机位置编码器偏移 |
| PD增益因子 | Kp_factor_range |
0.8, 1.3 | ✗ | ✗ | PD比例增益因子(未启用) |
| PD阻尼因子 | Kd_factor_range |
0.5, 1.5 | ✗ | ✗ | PD微分增益因子(未启用) |
| 环境属性 | |||||
| 重力 | gravity_range |
-1.0, 1.0 m/s² | ✓ | ✗ | 重力加速度偏移 |
| 重力随机化间隔 | gravity_rand_interval_s |
8.0秒 | ✓ | - | 重力随机化的时间间隔 |
| 重力脉冲持续时间 | gravity_impulse_duration |
0.99 | ✓ | - | 重力脉冲持续时间比例 |
| 其他 | |||||
| 刚体随机化 | randomize_rigids_after_start |
- | ✗ | - | 启动后随机化刚体(未启用) |
| 推机器人 | push_robots |
- | ✗ | - | 随机推机器人(未启用) |
说明:
- 是否启用:表示该参数是否在训练中随机化
- 是否作为特权观测:表示该参数是否作为特权信息提供给adaptation module(仅在训练时可用)
- 大多数物理参数都启用了随机化,但不作为特权观测,迫使策略学习鲁棒的行为
- 只有摩擦和恢复系数作为特权观测,帮助adaptation module估计环境特性
6.4 任务与行为采样
6.4.1 训练时的行为参数采样
重要说明 :在训练时,行为参数是自动采样的,不需要人工指定。系统使用**自适应课程学习(Adaptive Curriculum Learning)**来自动调整参数范围。
采样机制:
-
自动采样频率:
115:116:scripts/train.pyCfg.commands.resampling_time = 10- 每10秒重新采样一次任务和行为参数
- 这意味着在每个训练episode中,行为参数会保持不变,直到episode结束或10秒后重新采样
-
自适应课程学习:
710:760:go1_gym/envs/base/legged_robot.pydef _resample_commands(self, env_ids): # ... 更新课程学习 ... for i, (category, curriculum) in enumerate(zip(self.category_names, self.curricula)): # ... 根据性能更新课程 ... curriculum.update(old_bins, task_rewards, success_thresholds, ...) # ... 从课程中采样新命令 ... new_commands, new_bin_inds = curriculum.sample(batch_size=batch_size)- 系统根据策略的性能自动调整参数范围
- 如果策略在某个参数范围内表现良好,会逐渐增加难度(扩大参数范围)
- 如果策略表现不佳,会缩小参数范围,让策略更容易学习
-
步态类型采样:
763:817:go1_gym/envs/base/legged_robot.pyif self.cfg.commands.gaitwise_curricula: for i, (category, env_ids_in_category) in enumerate(zip(self.category_names, category_env_ids)): if category == "pronk": # pronking self.commands[env_ids_in_category, 5] = ... elif category == "trot": # trotting self.commands[env_ids_in_category, 5] = self.commands[env_ids_in_category, 5] / 2 + 0.25 self.commands[env_ids_in_category, 6] = 0 self.commands[env_ids_in_category, 7] = 0 elif category == "pace": # pacing ... elif category == "bound": # bounding ...- 系统会自动从不同的步态类型中采样(跳跃、小跑、踱步、跳跃)
- 每种步态类型对应不同的相位偏移参数设置
-
其他行为参数采样:
- 步频 :从
[2.0, 4.0]Hz范围内均匀采样 - 身体高度 :从
[-0.25, 0.15]m范围内均匀采样 - 脚摆动高度 :从
[0.03, 0.35]m范围内均匀采样 - 身体俯仰角 :从
[-0.4, 0.4]rad范围内均匀采样 - 站立宽度 :从
[0.10, 0.45]m范围内均匀采样
- 步频 :从
总结 :训练时,行为参数完全由系统自动采样,不需要人工干预。系统会根据训练进度自动调整参数范围,确保策略能够学习到多样化的行为。
6.4.2 部署时的行为参数设置
重要说明 :在部署时,行为参数需要人工指定 或通过遥控器输入 。系统不会根据环境地形自动调整行为参数。
设置方式:
-
通过遥控器实时调整(默认方式):
98:144:go1_gym_deploy/utils/command_profile.pyclass RCControllerProfile(CommandProfile): def __init__(self, dt, state_estimator, x_scale=1.0, y_scale=1.0, yaw_scale=1.0, ...): self.state_estimator = state_estimator ... def get_command(self, t, probe=False): command = self.state_estimator.get_command() command[0] = command[0] * self.x_scale command[1] = command[1] * self.y_scale command[2] = command[2] * self.yaw_scale ... return command, reset_timer- 操作员通过遥控器输入速度命令(vx,vy,ωzv_x, v_y, \omega_zvx,vy,ωz)
- 行为参数(步态类型、身体高度等)需要单独设置,通常通过代码或配置文件指定
- 遥控器主要控制任务命令(速度),而不是行为参数
-
通过预设命令配置文件:
76:96:go1_gym_deploy/utils/command_profile.pyclass ElegantGaitProfile(CommandProfile): def __init__(self, dt, filename): with open(f'../command_profiles/{filename}', 'r') as file: command_sequence = json.load(file) self.commands[:len_command_sequence, 0] = torch.Tensor(command_sequence["x_vel_cmd"]) self.commands[:len_command_sequence, 2] = torch.Tensor(command_sequence["yaw_vel_cmd"]) self.commands[:len_command_sequence, 3] = torch.Tensor(command_sequence["height_cmd"]) self.commands[:len_command_sequence, 4] = torch.Tensor(command_sequence["frequency_cmd"]) self.commands[:len_command_sequence, 5] = torch.Tensor(command_sequence["offset_cmd"]) self.commands[:len_command_sequence, 6] = torch.Tensor(command_sequence["phase_cmd"]) self.commands[:len_command_sequence, 7] = torch.Tensor(command_sequence["bound_cmd"]) self.commands[:len_command_sequence, 8] = torch.Tensor(command_sequence["duration_cmd"])- 可以创建JSON配置文件,预设完整的行为参数序列
- 包括速度命令和所有行为参数(身体高度、步频、相位偏移等)
-
通过代码直接设置:
30:30:go1_gym_deploy/scripts/deploy_policy.pycommand_profile = RCControllerProfile(dt=control_dt, state_estimator=se, x_scale=max_vel, y_scale=0.6, yaw_scale=max_yaw_vel)- 在部署脚本中,可以设置速度缩放参数
- 但行为参数(如步态类型)通常需要在LCM消息或配置文件中设置
如何指定行为参数?
方法1:修改部署代码(推荐用于固定行为参数):
python
# 在部署脚本中,可以创建一个自定义的CommandProfile
class CustomGaitProfile(CommandProfile):
def __init__(self, dt):
super().__init__(dt)
# 设置固定的行为参数
self.commands[:, 3] = 0.0 # 身体高度命令
self.commands[:, 4] = 3.0 # 步频(Hz)
self.commands[:, 5] = 0.5 # 相位偏移1(小跑步态)
self.commands[:, 6] = 0.0 # 相位偏移2
self.commands[:, 7] = 0.0 # 相位偏移3
self.commands[:, 8] = 0.5 # 支撑相持续时间
self.commands[:, 9] = 0.15 # 脚摆动高度
# ... 其他参数 ...方法2:通过LCM消息动态设置(推荐用于实时调整):
- 系统可以通过LCM消息接收行为参数
- 操作员可以通过上位机软件实时调整参数
- 需要修改
LCMAgent类来接收和处理这些消息
方法3:使用预设配置文件(推荐用于复杂行为序列):
- 创建JSON文件,定义完整的行为参数序列
- 使用
ElegantGaitProfile加载配置文件 - 适合预定义的运动模式(如"爬楼梯模式"、"过障碍模式")
实际部署示例:
假设你想让机器人在部署时使用小跑步态,可以这样设置:
python
# 在部署脚本中
command_profile = RCControllerProfile(dt=control_dt, state_estimator=se, ...)
# 方法1:如果使用自定义CommandProfile
class TrottingProfile(RCControllerProfile):
def get_command(self, t, probe=False):
command, reset_timer = super().get_command(t, probe)
# 覆盖行为参数为小跑步态
command[3] = 0.0 # 身体高度
command[4] = 3.0 # 步频
command[5] = 0.5 # 相位偏移1(小跑)
command[6] = 0.0 # 相位偏移2
command[7] = 0.0 # 相位偏移3
command[8] = 0.5 # 支撑相持续时间
return command, reset_timer
command_profile = TrottingProfile(dt=control_dt, state_estimator=se, ...)重要限制:
-
系统不会自动调整 :部署时,行为参数不会根据环境地形自动调整。如果遇到障碍物,操作员需要手动调整身体高度、脚摆动高度等参数。
-
需要操作员经验:操作员需要理解每个行为参数的作用,并根据环境选择合适的参数值。
-
实时调整困难:虽然可以通过LCM消息实时调整,但需要额外的上位机软件支持。
未来改进方向(论文中提到):
- 使用分层学习,让高层策略自动选择行为参数
- 从人类演示中学习参数选择策略
- 基于环境感知自动调整参数
6.5 训练算法
- 算法:PPO (Proximal Policy Optimization)
- 训练迭代:100,000次迭代
- 评估频率:每100次迭代评估一次
代码调用:
213:216:scripts/train.py
env = HistoryWrapper(env)
gpu_id = 0
runner = Runner(env, device=f"cuda:{gpu_id}")
runner.learn(num_learning_iterations=100000, init_at_random_ep_len=True, eval_freq=100)7. 部署与实时控制
7.1 部署架构
部署系统使用**LCM (Lightweight Communications and Marshalling)**进行实时通信:
- 状态估计器(State Estimator):从IMU和关节编码器估计机器人状态
- LCM Agent:封装策略网络和动作发布
- 命令配置文件(Command Profile):定义预定义的运动序列
7.2 状态估计
状态估计器功能:
- 从IMU获取姿态和角速度
- 从关节编码器获取关节位置和速度
- 估计基座线速度(通过运动学)
- 检测脚部接触状态
代码实现(部署时):
125:175:go1_gym_deploy/envs/lcm_agent.py
def get_obs(self):
self.dof_pos = self.se.get_joint_positions()
self.dof_vel = self.se.get_joint_velocities()
self.gravity_vector = self.se.get_gravity_vector()
self.body_linear_vel = self.se.get_body_linear_vel()
self.body_angular_vel = self.se.get_body_angular_vel()
ob = np.concatenate((self.gravity_vector.reshape(1, -1),
self.commands * self.commands_scale,
(self.dof_pos - self.default_dof_pos).reshape(1, -1) * self.obs_scales["dof_pos"],
self.dof_vel.reshape(1, -1) * self.obs_scales["dof_vel"],
torch.clip(self.actions, -self.cfg["normalization"]["clip_actions"],
self.cfg["normalization"]["clip_actions"]).cpu().detach().numpy().reshape(1, -1)
), axis=1)
if self.cfg["env"]["observe_two_prev_actions"]:
ob = np.concatenate((ob,
self.last_actions.cpu().detach().numpy().reshape(1, -1)), axis=1)
if self.cfg["env"]["observe_clock_inputs"]:
ob = np.concatenate((ob,
self.clock_inputs), axis=1)7.3 动作发布
部署时将动作转换为PD目标并通过LCM发布:
代码实现:
189:217:go1_gym_deploy/envs/lcm_agent.py
def publish_action(self, action, hard_reset=False):
command_for_robot = pd_tau_targets_lcmt()
self.joint_pos_target = \
(action[0, :12].detach().cpu().numpy() * self.cfg["control"]["action_scale"]).flatten()
self.joint_pos_target[[0, 3, 6, 9]] *= self.cfg["control"]["hip_scale_reduction"]
self.joint_pos_target = self.joint_pos_target
self.joint_pos_target += self.default_dof_pos
joint_pos_target = self.joint_pos_target[self.joint_idxs]
self.joint_vel_target = np.zeros(12)
command_for_robot.q_des = joint_pos_target
command_for_robot.qd_des = self.joint_vel_target
command_for_robot.kp = self.p_gains
command_for_robot.kd = self.d_gains
command_for_robot.tau_ff = np.zeros(12)
command_for_robot.se_contactState = np.zeros(4)
command_for_robot.timestamp_us = int(time.time() * 10 ** 6)
command_for_robot.id = 0
if hard_reset:
command_for_robot.id = -1
self.torques = (self.joint_pos_target - self.dof_pos) * self.p_gains + (self.joint_vel_target - self.dof_vel) * self.d_gains
lc.publish("pd_plustau_targets", command_for_robot.encode())7.4 步态相位更新(部署时)
部署时同样需要更新步态相位和时钟输入:
代码实现:
238:262:go1_gym_deploy/envs/lcm_agent.py
# clock accounting
frequencies = self.commands[:, 4]
phases = self.commands[:, 5]
offsets = self.commands[:, 6]
if self.num_commands == 8:
bounds = 0
durations = self.commands[:, 7]
else:
bounds = self.commands[:, 7]
durations = self.commands[:, 8]
self.gait_indices = torch.remainder(self.gait_indices + self.dt * frequencies, 1.0)
if "pacing_offset" in self.cfg["commands"] and self.cfg["commands"]["pacing_offset"]:
self.foot_indices = [self.gait_indices + phases + offsets + bounds,
self.gait_indices + bounds,
self.gait_indices + offsets,
self.gait_indices + phases]
else:
self.foot_indices = [self.gait_indices + phases + offsets + bounds,
self.gait_indices + offsets,
self.gait_indices + bounds,
self.gait_indices + phases]
self.clock_inputs[:, 0] = torch.sin(2 * np.pi * self.foot_indices[0])
self.clock_inputs[:, 1] = torch.sin(2 * np.pi * self.foot_indices[1])
self.clock_inputs[:, 2] = torch.sin(2 * np.pi * self.foot_indices[2])7.5 部署流程
部署脚本:
15:55:go1_gym_deploy/scripts/deploy_policy.py
def load_and_run_policy(label, experiment_name, max_vel=1.0, max_yaw_vel=1.0):
# load agent
dirs = glob.glob(f"../../runs/{label}/*")
logdir = sorted(dirs)[0]
with open(logdir+"/parameters.pkl", 'rb') as file:
pkl_cfg = pkl.load(file)
print(pkl_cfg.keys())
cfg = pkl_cfg["Cfg"]
print(cfg.keys())
se = StateEstimator(lc)
control_dt = 0.02
command_profile = RCControllerProfile(dt=control_dt, state_estimator=se, x_scale=max_vel, y_scale=0.6, yaw_scale=max_yaw_vel)
hardware_agent = LCMAgent(cfg, se, command_profile)
se.spin()
from go1_gym_deploy.envs.history_wrapper import HistoryWrapper
hardware_agent = HistoryWrapper(hardware_agent)
policy = load_policy(logdir)
# load runner
root = f"{pathlib.Path(__file__).parent.resolve()}/../../logs/"
pathlib.Path(root).mkdir(parents=True, exist_ok=True)
deployment_runner = DeploymentRunner(experiment_name=experiment_name, se=None,
log_root=f"{root}/{experiment_name}")
deployment_runner.add_control_agent(hardware_agent, "hardware_closed_loop")
deployment_runner.add_policy(policy)
deployment_runner.add_command_profile(command_profile)
if len(sys.argv) >= 2:
max_steps = int(sys.argv[1])
else:
max_steps = 10000000
print(f'max steps {max_steps}')
deployment_runner.run(max_steps=max_steps, logging=True)策略加载:
57:69:go1_gym_deploy/scripts/deploy_policy.py
def load_policy(logdir):
body = torch.jit.load(logdir + '/checkpoints/body_latest.jit')
import os
adaptation_module = torch.jit.load(logdir + '/checkpoints/adaptation_module_latest.jit')
def policy(obs, info):
i = 0
latent = adaptation_module.forward(obs["obs_history"].to('cpu'))
action = body.forward(torch.cat((obs["obs_history"].to('cpu'), latent), dim=-1))
info['latent'] = latent
return action
return policy8. 关键创新点总结
-
条件策略设计:
- 通过行为参数btb_tbt条件化策略,使单一策略能生成多样化行为
- 避免了训练多个独立策略的计算成本
-
奖励结构创新:
- 三类奖励(任务、固定辅助、增强辅助)的精心设计
- rtaskexp(cauxraux)r_{task}\exp(c_{aux}r_{aux})rtaskexp(cauxraux)组合确保任务目标不被辅助目标淹没
-
物理启发的行为参数化:
- 基于生物力学原理设计行为参数(步态相位、Raibert启发式)
- 使参数具有直观物理意义,便于人类理解和调整
-
无需重新训练的适应性:
- 通过实时调整行为参数,适应分布外环境
- 显著减少针对新环境的迭代训练需求
-
执行器网络建模:
- 使用神经网络精确建模真实电机行为,提高sim-to-real迁移能力
-
历史观测与域随机化:
- 30步历史观测提供时序信息
- 广泛的域随机化提高鲁棒性
9. 方法限制与权衡
9.1 任务性能与行为多样性的权衡
MoB方法在训练环境中会略微降低任务性能,这是行为多样性与任务性能之间的固有权衡:
-
步态约束限制:强制遵循特定步态模式(如小跑、跳跃)会限制机器人在某些任务上的最优性能
- 例如:在平地冲刺任务中,固定步态可能不如自由步态灵活
- 行为参数化要求策略同时满足任务目标和行为约束,可能产生次优解
-
高速运动限制 :热图分析显示,行为参数化对高速直线+旋转组合运动存在限制
- 当同时要求高线速度和角速度时,某些步态配置可能无法满足
- 例如:小跑步态在高速转弯时可能不如其他步态稳定
-
计算开销:虽然单一策略避免了训练多个策略,但:
- 策略网络需要处理额外的行为参数输入(15维命令向量)
- 历史观测维度增加(30步×70维=2100维)
- 奖励计算更复杂(增强辅助奖励需要实时计算期望接触状态)
代码体现:训练配置中可以看到行为参数的采样范围限制了某些极端行为:
156:166:scripts/train.py
Cfg.commands.body_height_cmd = [-0.25, 0.15]
Cfg.commands.gait_frequency_cmd_range = [2.0, 4.0]
Cfg.commands.footswing_height_range = [0.03, 0.35]
Cfg.commands.body_pitch_range = [-0.4, 0.4]
Cfg.commands.stance_width_range = [0.10, 0.45]这些范围限制了机器人的运动能力,但同时也确保了训练稳定性和sim-to-real迁移。
9.2 行为参数化限制
当前的行为参数化设计虽然覆盖了大部分常见步态,但仍存在以下限制:
9.2.1 无法表达的行为
- 单腿行为:当前参数化假设四足协调运动,无法表达单腿跳跃、三腿支撑等非对称行为
- 特技动作:后空翻、侧翻等需要复杂时序协调的动作超出了当前参数化范围
- 动态平衡行为:某些需要快速重心转移的极端行为可能无法通过当前参数表达
9.2.2 行为空间盲区
行为参数空间存在"盲区",即某些参数组合可能:
- 物理不可行:例如,极高的步频(>4Hz)配合极低的脚摆动高度可能导致脚无法及时抬起
- 训练不足:某些参数组合在训练中采样频率低,策略可能未充分学习
- 参数冲突 :多个行为参数同时调整时可能产生冲突,例如:
- 高身体高度 + 宽站立宽度 + 高步频可能超出关节运动范围
- 极端俯仰角 + 高速运动可能导致不稳定
代码体现:步态相位偏移的计算方式限制了可能的步态组合:
826:846:go1_gym/envs/base/legged_robot.py
def _step_contact_targets(self):
if self.cfg.env.observe_gait_commands:
frequencies = self.commands[:, 4]
phases = self.commands[:, 5]
offsets = self.commands[:, 6]
bounds = self.commands[:, 7]
durations = self.commands[:, 8]
self.gait_indices = torch.remainder(self.gait_indices + self.dt * frequencies, 1.0)这种基于固定公式的计算方式无法表达更复杂的步态时序模式。
9.2.3 参数化设计假设
当前参数化基于以下假设,这些假设限制了行为空间:
- 周期性假设:假设所有步态都是周期性的,无法表达非周期性或自适应步态
- 对称性假设:左右对称的步态更容易表达,非对称步态受限
- 线性组合假设:行为参数通过线性组合影响步态,无法表达非线性交互
9.3 人类依赖性
9.3.1 当前系统的依赖
系统目前需要人类操作员手动调整行为参数,这带来了以下限制:
-
实时调整需求:操作员需要根据环境变化实时调整参数
- 例如:遇到障碍物时需要降低身体高度、增加脚摆动高度
- 需要快速响应和操作经验
-
参数选择困难:15维行为参数空间中,操作员需要理解每个参数的影响
- 参数之间存在交互作用,调整一个参数可能影响其他行为
- 缺乏直观的"最佳参数"指导
-
部署复杂性:部署系统需要:
- 状态估计器准确估计机器人状态
- LCM通信稳定可靠
- 操作员熟悉遥控器映射和参数调整界面
代码体现:部署时的命令配置需要操作员通过遥控器输入:
98:998:go1_gym_deploy/scripts/deploy_policy.py
command_profile = RCControllerProfile(dt=control_dt, state_estimator=se, x_scale=max_vel, y_scale=0.6, yaw_scale=max_yaw_vel)9.3.2 未来改进方向
论文和代码中暗示了以下可能的改进方向:
-
分层学习:
- 高层策略自动选择行为参数
- 低层策略执行具体运动
- 减少人类干预需求
-
人类演示学习:
- 从人类操作中学习参数选择策略
- 使用模仿学习或逆强化学习
- 自动适应不同环境
-
自适应参数调整:
- 基于环境感知自动调整行为参数
- 使用强化学习优化参数选择
- 实现完全自主的行为切换
-
简化参数空间:
- 减少参数维度或使用参数降维
- 提供预设行为模式(如"爬楼梯模式"、"过障碍模式")
- 降低操作复杂度
9.4 其他技术限制
9.4.1 仿真到现实的差距
尽管使用了广泛的域随机化和执行器网络,仍存在sim-to-real差距:
- 传感器噪声:真实IMU和编码器的噪声模式可能与仿真不同
- 延迟建模:虽然建模了20ms延迟,但真实系统的延迟可能更复杂
- 地面特性:真实地面的摩擦、弹性等特性难以完全模拟
9.4.2 计算资源需求
- 训练时间:100,000次迭代需要大量计算资源
- 实时推理:部署时需要实时运行策略网络和adaptation module
- 历史观测存储:30步历史观测需要额外的内存和计算
9.4.3 可扩展性限制
- 其他机器人平台:当前设计针对Go1优化,扩展到其他机器人需要重新设计参数化
- 更复杂任务:当前主要关注速度跟踪,扩展到更复杂任务(如操作、导航)需要额外设计