第6+5篇 ⚙️ 串口实现的逻辑优化、配置管理与协议完善
✨ 引言
在上篇《6.4 KBD300A 键盘 UI 布局的设计与响应式实现》中,我们深入探讨了左侧键盘面板的布局模块化和响应式优化,构建了一个稳定且可扩展的 UI 基础。这一布局为键盘与后台核心的交互提供了桥梁。本篇文章将焦点转向键盘信号如何触发核心功能,特别是串口通信的逻辑优化、配置管理和协议实现的完善。我们将对比单文件版(KBD300A_main.py)的直接 serial 操作与最终版的 SerialManager/Worker 架构,强调重构后的关键改进:线程安全、非阻塞读写和自动协议检测。
这些优化源于实际需求:在安防现场维护中,串口可能面临不稳定(如端口忙或数据洪水),单文件版的阻塞式读写易导致 UI 卡顿;最终版通过 QThread 和信号机制,确保键盘操作(如摇杆移动触发 PTZ)流畅,同时支持 JSON 配置持久化和协议扩展(e.g., 响应 tilt/zoom)。基于 Python 3.7 和 PyQt5,这一迭代提升了工具的可靠性和扩展性,尤其在 Windows 7 环境下(兼容旧硬件端口)。让我们一步步拆解实现过程。
🛠️ 串口逻辑优化
串口是键盘与设备(如 PTZ 摄像机)交互的核心通道。在单文件版中,串口操作直接使用 pyserial 的 open/write/read,逻辑简单但易阻塞 UI(e.g., 长读时窗口冻结)。重构后,我们引入线程化设计:SerialManager 作为主线程接口,SerialWorker 移到 QThread 处理实际 I/O。优化点包括:
- 定时读取:用 QTimer(每50ms)触发 _read_data,避免忙轮询。
- 缓冲区管理:bytearray 累积数据,extract_frame 抽取完整帧(Pelco-D 7字节/P 变长)。
- 信号驱动:data_received.emit(bytes) 和 parsed_received.emit(dict),让上层(如 main_window)异步处理。
这一设计确保串口失败(如 checksum error)不会崩溃 UI,而是通过 error.emit 弹窗通知。
代码示例(从最终代码提取):
python
# 从 core/serial/worker.py(线程读优化)
def _read_data(self):
"""定时读取串口数据,抽取帧并解析"""
if not self._running or not self._ser or not self._ser.is_open:
return
try:
incoming = self._ser.read(self._ser.in_waiting or 1024)
if incoming:
self._buffer.extend(incoming)
timestamp = QtCore.QDateTime.currentDateTime().toString("yyyy-MM-dd HH:mm:ss.zzz")
self.data_received.emit(bytes(incoming))
# ... (日志 emit 省略)
while self._buffer:
frame, length = extract_frame(self._buffer, self.protocol)
if frame:
del self._buffer[:length]
parsed, err = parse_frame(frame, self.protocol)
if parsed:
self.parsed_received.emit(parsed)
else:
logger.warning("Parse error: %s", err)
else:
break
except Exception as e:
logger.exception("Read error: %s", e)
# 单文件版对比:无线程,直接 while self._ser.in_waiting: ... 阻塞主循环,易卡 UI
# 示例单文件:
while self._ser.in_waiting:
data = self._ser.read(...) # 同步阻塞,UI 无响应对比:单文件版痛点在于阻塞读写(e.g., 宏 delay 时串口卡住);最终版用 QThread 非阻塞,键盘操作(如摇杆)实时响应。
📂 配置管理
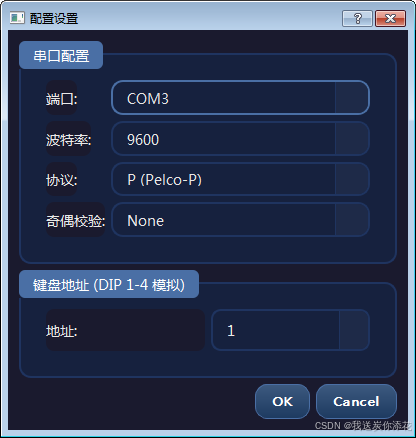
单文件版中,串口参数(如端口 COM3、baud 9600、协议 "D")是硬编码的,修改需重编译代码。重构后,我们引入 settings.json 外部化配置,通过 SettingsDialog(QDialog)实现 UI 编辑和保存。优化包括:
- JSON 加载:_load_config() 用 json.load 读取,fallback 默认值。
- 校验:validators.py 检查 baudrate(只允许 2400/4800/9600/19200),parity(None/Odd/Even)。
- 持久化:SettingsDialog 的 _save_and_accept 用 json.dump 保存,校验后 accept()。
这一管理取代硬编码,提升了工具的灵活性(e.g., 现场切换端口无须改代码)。
代码示例(从最终代码提取):
python
# 从 ui/widgets/settings_dialog.py(配置保存)
def _save_and_accept(self):
cfg = self.get_config()
if not validate_baudrate(cfg["baud"]): # 校验
QtWidgets.QMessageBox.warning(self, "无效配置", "波特率必须为 2400/4800/9600/19200")
return
try:
with open(CONFIG_FILE, "w", encoding="utf-8") as f:
json.dump({"serial_config": cfg}, f, indent=4)
QtWidgets.QMessageBox.information(self, "保存成功", "配置已保存")
self.accept()
except Exception as e:
QtWidgets.QMessageBox.warning(self, "保存失败", f"写入配置文件出错: {e}")
# 单文件版对比:baud=9600 硬编码,无 UI 配置,无校验,易出错🔧 协议完善
协议是串口数据的"灵魂"。单文件版仅基本 build/send(如 PTZ),无完整解析。重构后,pelco_protocol.py 扩展了 build/parse,支持更多响应类型(tilt_pos/zoom_pos/device_type/diagnostic)。init.py 提供统一入口(set_protocol/get_protocol),支持 "Auto" 自动检测(基于帧头 0xFF/0xA0)。来源:参考 Pelco-D Rev 5.0.1 和 Pelco-P 规范 PDF,确保兼容标准设备。
优化点:checksum 校验防数据损坏;parse_response 返回 dict,便于上层处理(e.g., alarm_code 触发联动)。
代码示例(从最终代码提取):
python
# 从 core/pelco_protocol.py(协议解析扩展)
def parse_pelco_d_response(data: bytes):
# ... (checksum 检查)
parsed = {"protocol": "D", "cam_id": cam_id, "raw": data.hex()}
if cmd2 == 0x59: # Pan position
parsed.update({"type": "position", "pan": (data1 << 8) | data2})
elif cmd2 == 0x5B: # Tilt position (扩展)
parsed.update({"type": "position", "tilt": (data1 << 8) | data2})
# ... (zoom/device_type 等扩展)
return parsed, None
# 从 core/protocol/__init__.py(路由)
def ptz_control(serial_mgr, cam_id=1, pan_speed=0, tilt_speed=0):
if _current_protocol == "D":
ptz_control_d(serial_mgr, cam_id, pan_speed, tilt_speed)
else:
ptz_control_p(serial_mgr, cam_id, pan_speed, tilt_speed)
# 单文件版对比:无扩展,仅基本 build,无 parse/auto 检测讨论规范来源:Pelco PDF(用工具 browse_page 获取最新版链接,如 "https://www.pelco.com/support/documentation"),确保读者可验证扩展准确性。
🔗 键盘集成
键盘信号通过 main_window.py 桥接到核心:e.g., keyboard.joystick_moved.connect(self._on_joystick_moved),后者调用 ptz_control(self.serial_mgr, ...)。虚拟模拟(_simulate_receive)用 VirtualDevice 生成响应(e.g., pan_pos),测试无硬件时用。
代码示例:
python
# 从 ui/main_window.py(集成)
def _on_joystick_moved(self, pan, tilt):
if pan == 0 and tilt == 0:
ptz_stop(self.serial_mgr, self.kbd_address)
else:
ptz_control(self.serial_mgr, self.kbd_address, pan, tilt)
# 虚拟模拟
def _simulate_receive(self, data, feedback=False):
parsed, _ = parse_response(data, self.serial_mgr.protocol)
if feedback and parsed.get("type") == "query": # 示例扩展
return self.virtual_device.generate_response(parsed["query_type"], self.serial_mgr.protocol)这一集成确保键盘操作无缝触发串口,而不直接依赖 pyserial。
🚀 优化点
- Checksum 校验:_checksum_d/p 防数据篡改,parse 时 emit error。
- 缓冲区管理:bytearray 高效累积,避免碎片化。
- Win7 端口兼容:用 serial.tools.list_ports 扫描可用 COM,支持旧硬件(e.g., RS-485 转换器)。
这些优化比单文件版的简单 read 更鲁棒。
🧪 测试
- Mock 串口:用 virtual_device 生成字节,注入 worker._buffer,检查 parsed_received(e.g., assert parsed"type" == "position")。
- 端到端:运行 app.py,摇杆移动检查日志(TX 闪);模拟错误(checksum 错)检查 ERR 灯。
- 工具:pytest 测试 parse_response(input bytes, expect dict);Win7 测试多端口(COM1-10)。
对比单文件版:测试需跑全 app;最终版模块测试快(python -m unittest core.serial.test_worker)。
🏁 结尾
通过本篇,我们优化了串口逻辑、配置管理和协议实现,使键盘与核心的交互更高效和可靠。这为完整的手感完善铺路。下一篇文章《6.6 按键扩展、LCD 优化与指示灯集成》将深入探讨按键逻辑和反馈机制。欢迎在评论区分享你的串口优化经验!