第一部分:稳定性问题的物理本质与数学描述
1.1 引言
在上一章我们了解了晶体管的核心指标------增益,而这一章我们了解晶体管稳定性,或者说放大器的"稳定度"问题。只有先让放大器能够稳定的输出,我们才能谈所谓的增益,不然增益无穷大,但一点用都没有,我们根本用不了。
1.2 谐振与振荡
我们首先要厘清两个关键概念:什么是 谐振条件(resonant) ,以及什么是 振荡(oscillation)。
这里有一个常见的中文翻译误区:很多人把"Resonance"翻译成"振荡",这是不准确的。
- Resonance 的正确中文翻译应该是 "共振" 或 "谐振"。
- Oscillation 才是我们所说的 "振荡"。
那么,如何区分"共振"和"振荡"呢?
1. 什么是"共振"?
想象一个 LC谐振腔(比如一个电感L和一个电容C组成的电路)。这个谐振腔有一个特定的"谐振频率"。
在这个特定频率下,会出现以下情况:
- 如果电路是并联 结构,那么所有元件的导纳相加会等于零。
- 如果电路是串联 结构,那么所有元件的阻抗相加会等于零。
这都属于"共振"现象。
当共振发生时,会发生什么奇妙的事情呢?
以并联LC电路为例:在谐振频率下,你不需要从外部给这个谐振腔注入电流,它的两端自己就会产生一个电压。这意味着从外部看进去的阻抗是无限大的。
电路内部的能量(在电感和电容之间)自己来回交换、往复流动,不需要外界提供能量来维持。就像一个压电晶体:在其谐振频率上,你甚至不需要给它电压,它内部的晶体结构自己就会因为机械特性而振动。这就是它的"谐振频率"。
所以,这种自身存在能量交换、不需要外部能量维持 的状态,就是 "共振" 。这个LC电路或压电晶体,我们称之为 "共振子" 或 "谐振腔",它是构成振荡器的基础元件。
理想情况下,如果一个共振腔内部没有任何电阻损耗,那么一旦给它一个初始能量(比如充一下电),内部的电流就会永无止境地在L和C之间来回流动,电压也会持续摆动,幅度永不衰减。
但实际上,现实中不存在完全没有损耗的共振腔(超导体可能接近),所以能量总会慢慢被消耗掉。
2. 什么是"振荡"?
振荡 则是指一个信号幅度持续增长的过程。一个电路要产生振荡,输出信号必须有越来越大的趋势。
那么,信号变大的能量从哪里来?天下没有免费的午餐------必须有一个主动元件 (如晶体管 或二极管)提供一个直流电源,并将能量转换成不断增长的交流信号。
最终,这个增长的信号不会无限大下去,因为晶体管会进入饱和或截止区,从而将电压幅度限制在一个稳定值。所以,振荡 的典型过程是:起振时幅度越来越大,最终达到一个稳定的振荡状态。
总结一下核心区别:
- 共振:一个被动的能量交换状态,理想下幅度不变。
- 振荡:一个主动的能量增长过程,需要直流电源供电,起振时幅度增大。
振荡器的工作原理
一个振荡器就是由一个被动的共振子 ,配合一个主动的电路(晶体管)构成的。晶体管的作用就是提供能量,让信号产生并增长起来。
振荡的数学条件
当我们设计放大器时,必须千方百计避免满足振荡条件,否则你的放大器就会意外地变成一个振荡器!
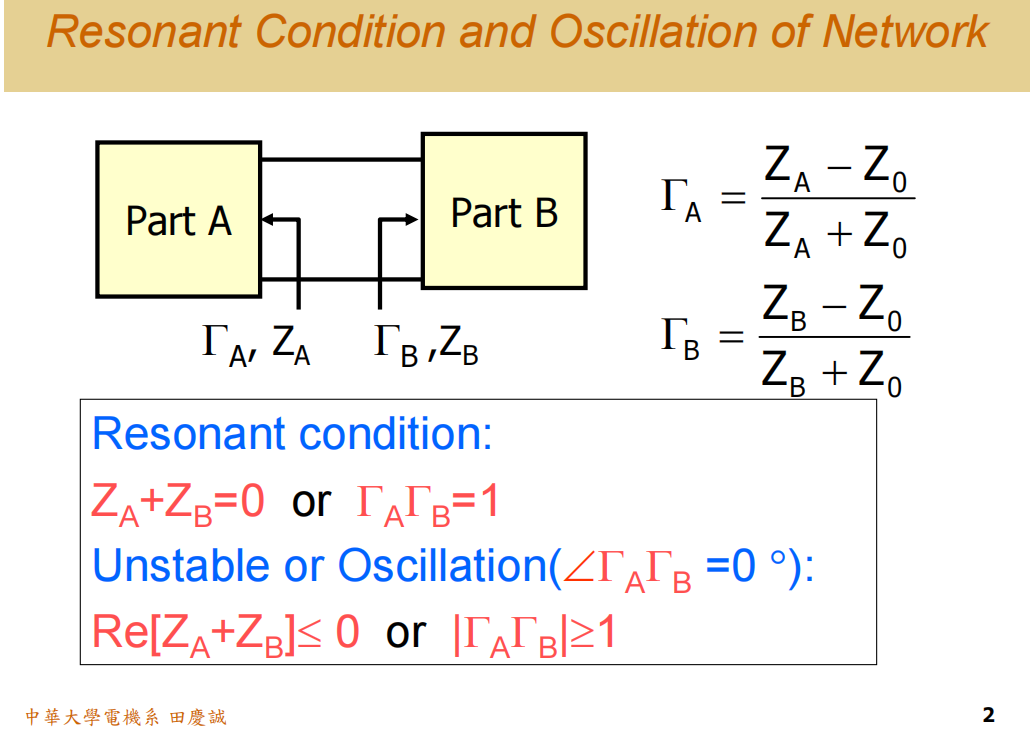
分析方法很简单:在电路的任意一个点把它"切开"成两半。
- 向左看,阻抗是ZAZ_AZA,相对于50欧姆的反射系数是ΓAΓ_AΓA。
- 向右看,阻抗是ZBZ_BZB,相对于50欧姆的反射系数是ΓBΓ_BΓB。
谐振条件 是:ΓA×ΓB=1Γ_A × Γ_B = 1ΓA×ΓB=1。
这个等式包含了两个至关重要的条件,缺一不可:
- 幅度条件 :∣ΓA×ΓB∣=1|Γ_A × Γ_B| = 1∣ΓA×ΓB∣=1。这意味着信号环绕一圈回来的"增益"正好是1。
- 相位条件 :∠(ΓA×ΓB)=0°∠(Γ_A × Γ_B) = 0°∠(ΓA×ΓB)=0°。这意味着信号环绕一圈回来的相位必须是零度(即360度的整数倍)。
为什么需要这两个条件?
想象信号从切面出发,经过右边反射,再经过左边反射,最后回到原点。如果相位是0度,那么新回来的信号会和原始信号建设性地叠加 (同相相加)。如果这一圈的增益又正好是1,那么信号就能维持不变,形成共振。
如何让电路"起振"?
要让电路从无到有地建立起振荡,我们需要更激进的条件:
- 相位条件 依然必须满足(相位差为0°)。
- 幅度条件 需要更强:∣ΓA×ΓB∣>1|Γ_A × Γ_B| > 1∣ΓA×ΓB∣>1。
这意味着信号每环绕一圈,幅度不仅没衰减,反而被放大了(比如增益是1.1)。这样一圈、两圈、三圈下来,信号就会像滚雪球一样越来越大 ,形成我们想要的振荡。
在实际设计中,这通常意味着电路某部分要呈现出 "负电阻" 的特性。当负电阻足够大,足以抵消电路中的正电阻损耗时,就能满足 ∣ΓA×ΓB∣>1|Γ_A × Γ_B| > 1∣ΓA×ΓB∣>1的条件,从而成功地让振荡器起振。
1.3 二端口网络稳定性
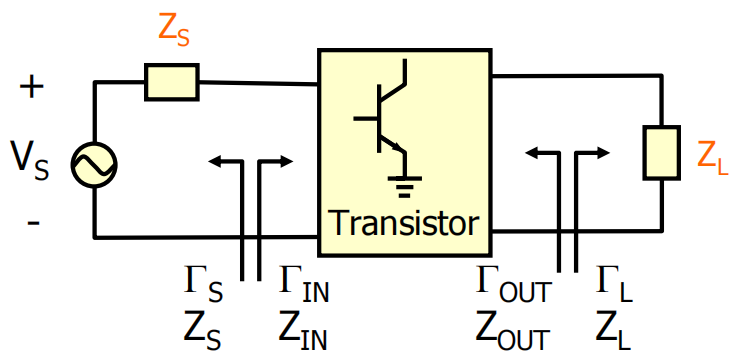
好的,我们继续。接下来,根据前面讨论的振荡条件,我们要具体分析一个二端口网络------也就是晶体管本身的稳定性。
晶体管有其S参数,构成了一个二端口网络。在这个网络分析中,我们会关注四个反射系数:ΓS,ΓIN,ΓL,ΓOUTΓ_S, Γ_{IN}, Γ_L, Γ_{OUT}ΓS,ΓIN,ΓL,ΓOUT。
当我们实际设计电路时,这个框图里究竟包含了哪些部分?
好,不要忘记。ΓSΓ_SΓS(源反射系数)包含了50欧姆的信号源 以及输入端的匹配电路 。所以,从晶体管输入端看向信号源,所看到的阻抗对应的反射系数就是我们的ΓSΓ_SΓS。同理,ΓLΓ_LΓL(负载反射系数)包含了什么?它包含了输出端的匹配电路 以及50欧姆的负载 。很多人会忘记这一点!请记住,ΓLΓ_LΓL是从晶体管输出端看出去,一直看到50欧姆负载,这两部分合起来所对应的反射系数。
那么, ΓINΓ_{IN}ΓIN又包含了什么呢?它是从晶体管前端看进去的阻抗,但晶体管会一直"看"到后端,信号会弹回来。所以,ΓINΓ_{IN}ΓIN实际上包含了晶体管本身 、输出端匹配电路 以及50欧姆负载 的影响。
最后复习一下ΓOUTΓ_{OUT}ΓOUT,它包含了什么?它包含了晶体管本身 、输入端匹配电路 以及50欧姆信号源 。因为你从晶体管后端看进去,会看到前端的ΓINΓ_{IN}ΓIN以及输入端的50欧姆,这些合起来决定了ΓOUTΓ_{OUT}ΓOUT。
我们将利用这四个参数来判断我们的电路是否满足振荡条件、是否会起振,或者说,判断它到底是稳定的还是不稳定的。
首先,我们介绍两个核心概念。
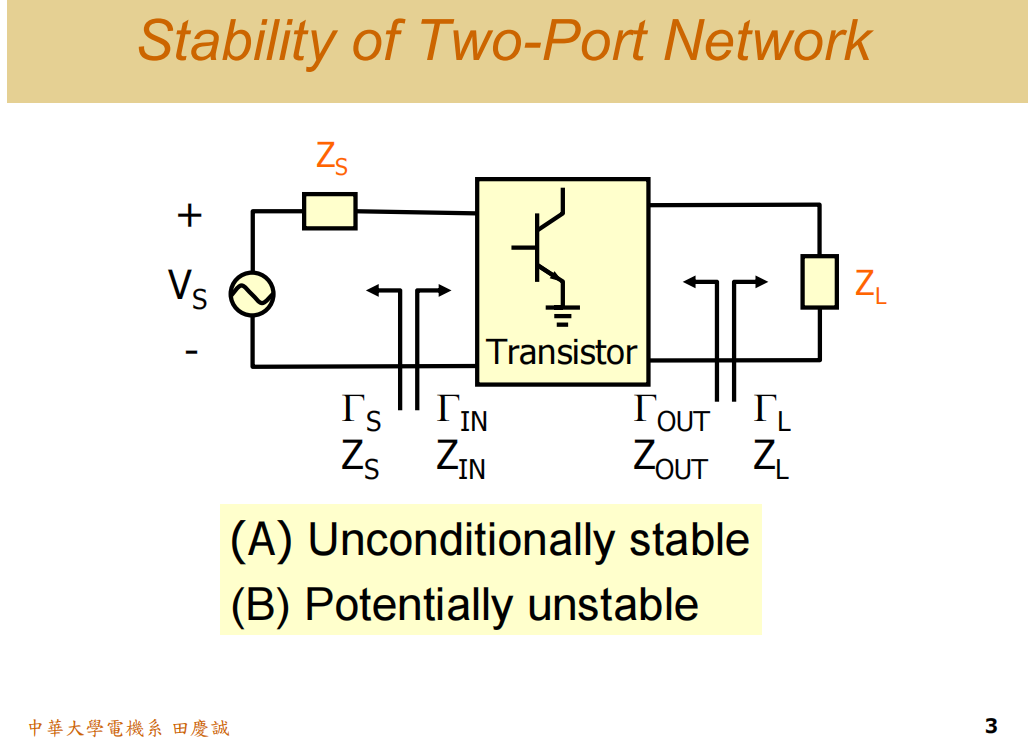
第一个是 "无条件稳定(Unconditionally stable)" 。
什么是"无条件稳定"?
一句话概括就是:无论你如何选择源和负载的匹配网络(只要是被动元件),放大器都保证不会振荡。
既然是你来设计,是不是可以任意选择ΓSΓ_SΓS和ΓLΓ_LΓL?
ΓSΓ_SΓS应该用什么来表示?它应该落在一个史密斯圆图上,其模值|ΓSΓ_SΓS| < 1。这个圆图我们称之为ΓSΓ_SΓS平面。
我在ΓSΓ_SΓS平面上任意取一点,代表什么物理意义?代表你已经完成了输入匹配电路的设计 !你选择了一个ΓSΓ_SΓS,就意味着你用被动的电感和电容完成了输入匹配。里面没有晶体管,没有负电阻,没有二极管,没有非线性电路。所以,它的反射系数绝对值绝对不会大于1 。因此,这个圆内的任何一点,都代表你的输入匹配已经做完了。
同样,ΓLΓ_LΓL平面也是如此,你任意选一个ΓLΓ_LΓL,也代表输出匹配做完了,并且|ΓLΓ_LΓL| ≤ 1。因为你用的都是被动的电感、电容、电阻或传输线,反射系数不可能大于1。
那么,"无条件稳定"的意思就是:我让你在这两个圆内随便选!无论选哪一点,我的晶体管电路都保证不会发生振荡。这就叫无条件稳定。
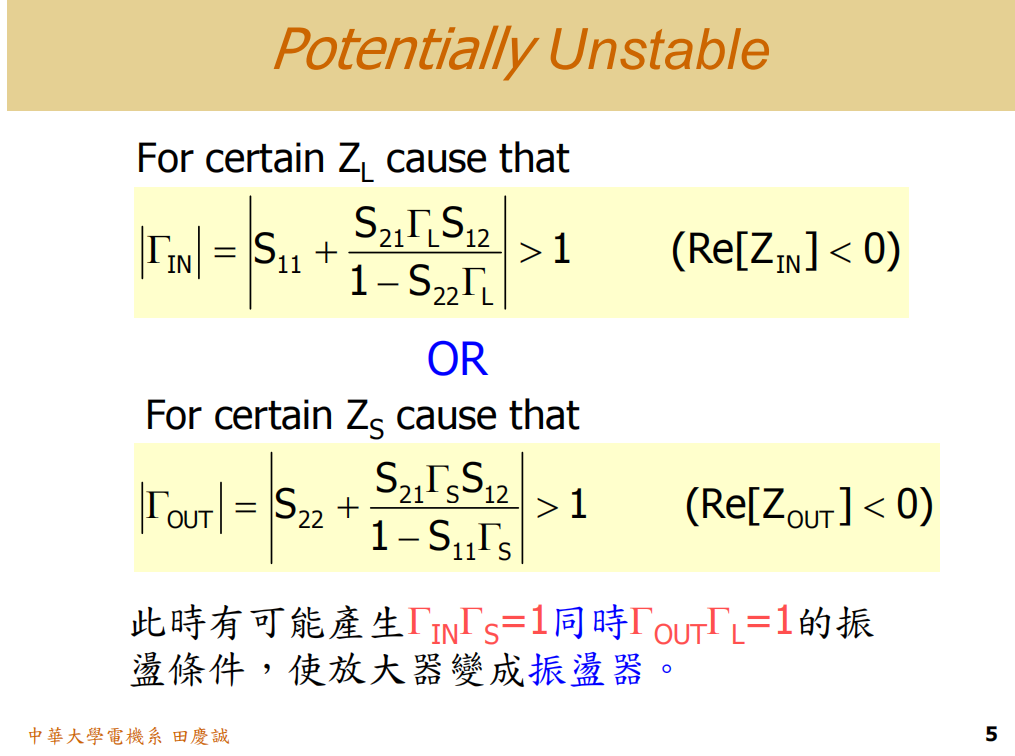
那什么又是 "潜在不稳定(Potentially unstable)" 呢?
它的意思是:抱歉,有些区域你不能选 。比如在ΓSΓ_SΓS平面上,有一块区域,如果你不小心选到了这一点,并把匹配电路做成这样,那就要小心了,晶体管可能会振荡。这个区域就叫不稳定区。换句话说,有部分的ΓSΓ_SΓS值不能取。另一个例子,在ΓLΓ_LΓL平面上也可能有一块区域不能取,取到之后,整个电路可能会不稳定。这种有部分区域需要规避的情况,我们就称之为"潜在不稳定"。
接下来我们看数学上的定义。
同样我们先讲"无条件稳定"。
匹配网络都是用LC或者传输线做出来的被动电路。被动电路是不可能让反射系数大于1的。所以我们能选的,就是史密斯圆图单位圆内部的区域。
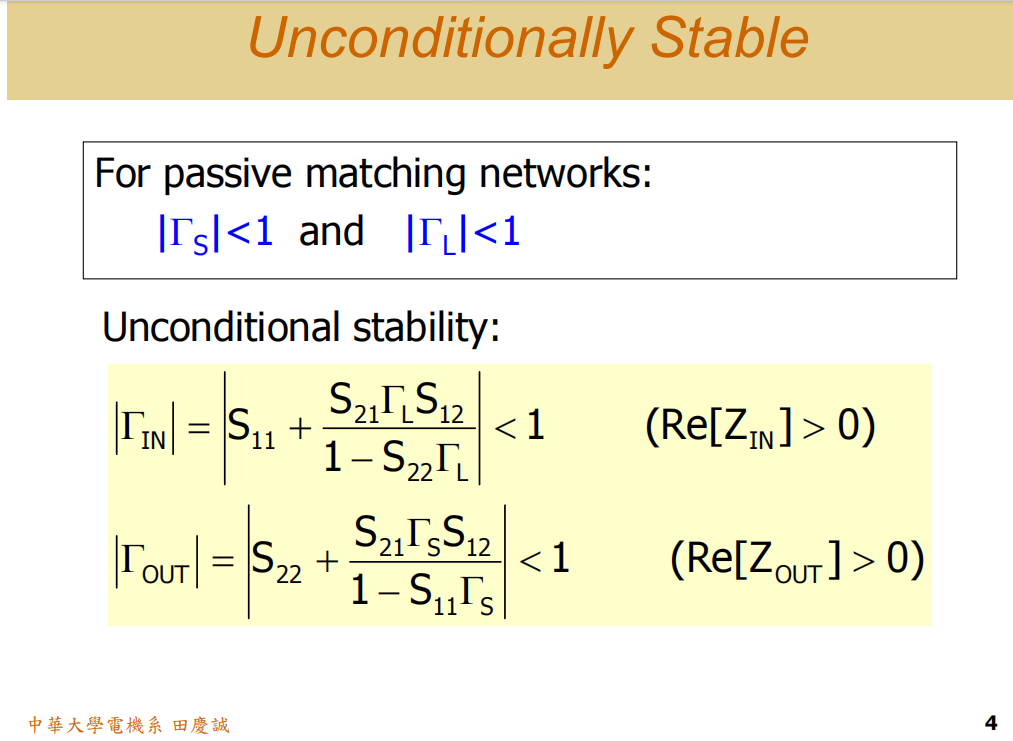
那么,为什么无条件稳定的定义是 |ΓINΓ_{IN}ΓIN| < 1 并且 |ΓOUTΓ_{OUT}ΓOUT| < 1 呢?
原因就在于我们需要避开产生振荡的可能性 。振荡的幅度条件是什么?在任何一个界面切开来,如果|ΓA×ΓBΓ_A × Γ_BΓA×ΓB| ≥ 1,那就有可能振荡了,对晶体管来说就可能振荡了(当然还有相位条件,但至少幅度条件满足了,就存在潜在风险)。
那我们来看,这四个参数,谁和谁配对?
- 在晶体管的前端界面切开:
- 往左看是 ΓSΓ_SΓS
- 往右看是ΓINΓ_{IN}ΓIN
- 它们俩是配对的。因为|ΓSΓ_SΓS| < 1 且 |ΓINΓ_{IN}ΓIN| < 1,所以有|ΓSΓ_SΓS × ΓINΓ_{IN}ΓIN| < 1。这个界面保证稳定,没问题。
- 在晶体管的后端界面切开:
- 往左看是 ΓOUTΓ_{OUT}ΓOUT
- 往右看是 ΓLΓ_LΓL
- 它们俩是配对的。因为|ΓOUTΓ_{OUT}ΓOUT| < 1 且 |ΓLΓ_LΓL| < 1,所以 |ΓOUTΓ_{OUT}ΓOUT × ΓLΓ_LΓL| < 1。这个界面也保证稳定。
因此,前后两个界面都保证不会起振,那么整个电路也保证不会起振。通常,|ΓSΓ_SΓS|<1和|ΓLΓ_LΓL|<1不算是"条件",而是使用被动元件构造匹配网络时的"已知前提" 。
所以,满足 |ΓINΓ_{IN}ΓIN|<1 和 ΓOUTΓ_{OUT}ΓOUT|<1 这两个真正的稳定条件,就是无条件稳定。
理解了这一点后,我们再深入一下。
ΓINΓ_{IN}ΓIN是谁的函数?是和 ΓLΓ_LΓL 有关的。如果 |ΓINΓ_{IN}ΓIN| > 1,代表哪一级不稳定?是前级(输入)不稳定,对吧?
那么前级不稳定是谁造成的?是谁的"罪过"?是ΓSΓ_SΓS吗?不,是ΓLΓ_LΓL。罪魁祸首其实是后级(负载) !前级不稳定可能是后级匹配没选好 。你后级ΓLΓ_LΓL乱选,有可能导致 |ΓINΓ_{IN}ΓIN| > 1。当然,晶体管本身的S11S_{11}S11也有作用,但后级的影响非常关键。
同理,如果 |ΓOUTΓ_{OUT}ΓOUT| > 1,是谁不稳定?是后级输出不稳定。后级不稳定,除了晶体管本身的S22S_{22}S22影响,还有谁的影响最大?是你前级的ΓS没有选好!你前级的匹配电路没选好,会造成你后级可能不稳定。
所以,总结一下这个重要关系:
- 前级不稳定,可能是后级匹配影响的。
- 后级不稳定,可能是前级匹配造成的。
从阻抗的角度看,这等价于 ZINZ_{IN}ZIN 的实部要大于0(正电阻),其反射系数的模值就会小于1。同理,如果 ZOUTZ_{OUT}ZOUT 的实部大于0,ΓOUTΓ_{OUT}ΓOUT 的模值就会小于1。这两个表述是完全等价的。核心就是看进去的阻抗不能有负电阻!
再来讲"潜在不稳定"。
刚才讲的是绝对稳定,现在是可能不稳定。注意,我只是说"可能",没有说它一定会振荡。为什么?因为相位条件满不满足还不知道 。而且光 |ΓINΓ_{IN}ΓIN| > 1,也不能保证 |ΓSΓ_SΓS × ΓINΓ_{IN}ΓIN| 一定会大于1.
ΓSΓ_SΓS也是我们随便选的,所以,连幅度条件都只是"有可能"成立。我只能说"有可能"不稳定。
因此,我们说"潜在"的意思就是只有可能性。至于会不会真的振荡,我们并不知道。
但是,在业界工作的时候,只要有可能造成公司亏损,你会去冒险吗?你会去赌吗?你大概不会,老板也绝对不会去赌!所以,只要有可能会不稳定,你这个放大器的设计,老板绝对不敢要。他一定会要求你设计成无条件稳定的放大器,绝对不可能接受一个有可能不稳定的设计。这是不可以接受的。
所以,结论是:
如果你发现 |ΓINΓ_{IN}ΓIN| > 1,或者 |ΓOUTΓ_{OUT}ΓOUT| > 1,这两个情况都有可能 带来不稳定。我在这里要强调一下,这只是有可能 产生 |ΓA×ΓBΓ_A × Γ_BΓA×ΓB| = 1 的情况。
而当这个乘积确实等于1,并且同时满足相位条件时,振荡条件就正式成立,你的放大器马上就变成了一个标准的振荡器。
因此,用S参数来判断振荡器的标准条件,就是要去检测是否同时满足了幅度和相位的谐振条件。如果都满足,那这就是一个确定会起振的振荡器。
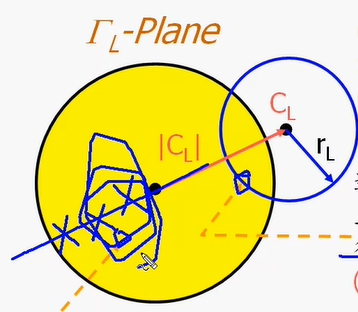
1.4 输出稳定圆与输入稳定圆
根据刚才的数学推导,我们来定义所谓的"输出稳定圆"。
输出稳定圆(output stability circles)
这个圆是画在 ΓLΓ_LΓL 平面 上的。ΓLΓ_LΓL 是你的选择,它一定会落在这个平面上半径小于1的单位圆内。你在这个圆上选一点,就代表你完成了一个输出匹配电路。
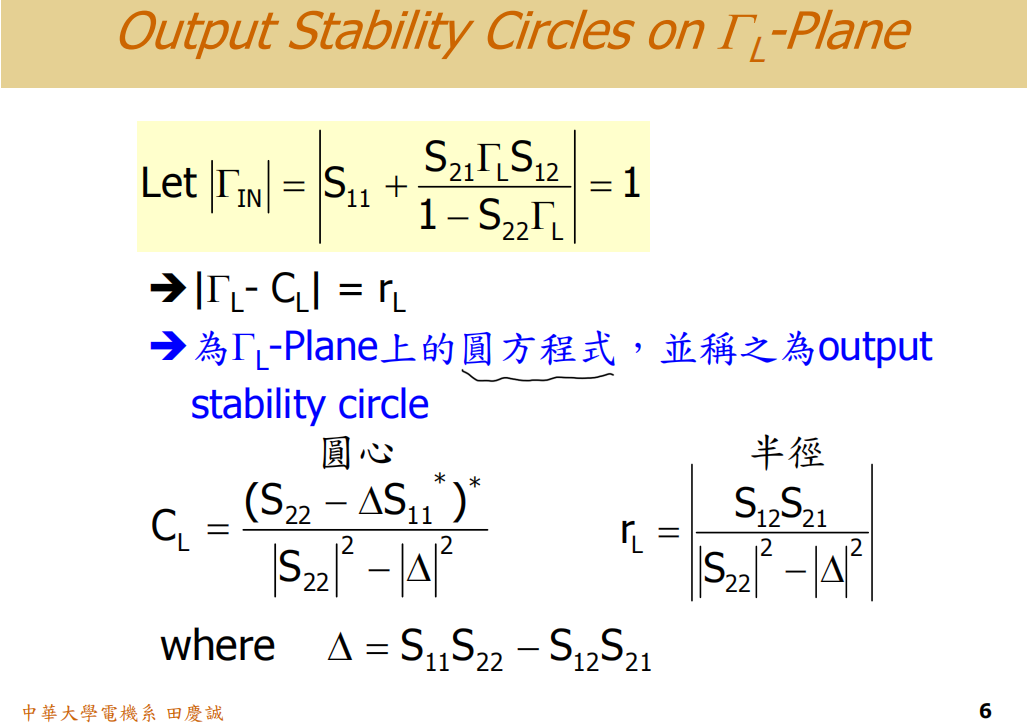
现在,我们根据 |ΓINΓ_{IN}ΓIN| = 1 这个条件,可以在 ΓLΓ_LΓL 平面上画出一个圆。这个圆有圆心和半径,它的方程式就是 |ΓINΓ_{IN}ΓIN| = 1。这个圆就叫做 输出稳定圆。
假设我们画出来的输出稳定圆长这样。
我要问一个问题:这个圆是基于 |ΓINΓ_{IN}ΓIN| = 1 画的。那么,输出稳定圆代表的是前级不稳定还是后级不稳定?
很多人想都不想:"Output?那肯定是后级不稳定嘛!" 错了!恰恰相反。|ΓINΓ_{IN}ΓIN| = 1 是谁不稳定?是前级输入不稳定!
那为什么它要叫"输出稳定圆"呢?因为它是在 ΓLΓ_LΓL 平面 上画的。ΓLΓ_LΓL 是和什么相关的?是你在做输出匹配 时要选择的。在做输出匹配时,你需要考虑稳定度问题,所以你要参考这个圈圈。因为你输出端(ΓLΓ_LΓL)如果乱选 ,可能会导致输入端(Input)不稳定。
所以,这个圈圈是用来指导你如何选择 ΓLΓ_LΓL才能得到一个稳定的范围。举个例子,可能圈圈内部 是不稳定区域,外部 是稳定区域。我们把这个圈圈称为输出稳定圆,但它的物理意义是:警告你如果ΓLΓ_LΓL选在禁区内,会导致前级不稳定。
这个圆的圆心和半径都可以从S参数直接计算出来。很简单,只要给我S参数,我就能把这个圆画出来。这个公式需要背吗?完全不需要。因为所有软件都会帮你算。
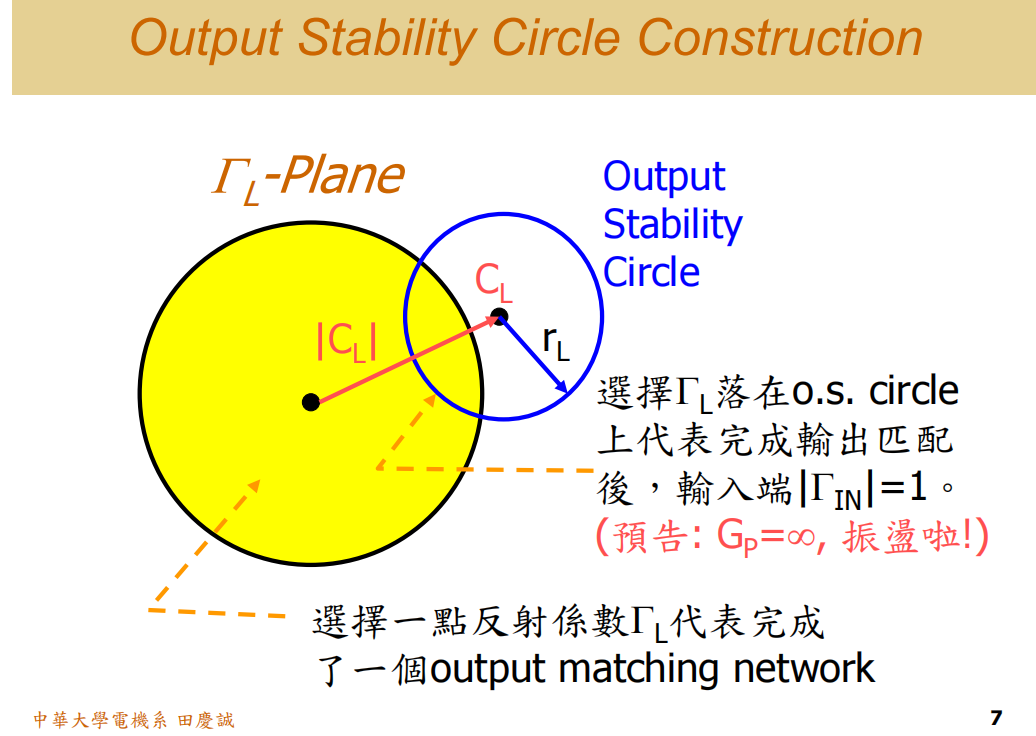
输出稳定圆的物理意义与应用
在 ΓLΓ_LΓL平面上随便选一点,物理意义是什么?代表你完成了一个输出匹配网络。
那么,如果你不小心把 ΓLΓ_LΓL 选到了这个输出稳定圆上面 ,会发生什么事?这代表你完成这个输出匹配后,糟糕了,你的 ΓINΓ_{IN}ΓIN的模值等于 1 ,输入端可能会变得不稳定。
预告一下:后面我们教放大器设计,比如设计最大增益放大器时,如果你把工作点选到这里,你的增益会变成多少?无限大 !保证会起振,你做的功率放大器就直接变成标准振荡器了。
所以,各位同学,现在有感觉了吗?请问,我的稳定圆在这里,你的 ΓLΓ_LΓL选哪一点比较合适?如果是你,你会选哪里?
是这里吗?对,离它远一点 比较好。你离它越远,稳定性就越好。也就是说,哪个点离稳定圆最远?通常是往这个方向(圆心反方向)。选在这个区域就比较稳妥。
你选太偏边上好不好?也不好,那样匹配电路的Q值太高,带宽窄,也不是好选择。所以大概在圆心反方向的这个区域,是比较好的选择。这样你的电路就比较不容易产生振荡。
工程实践中的深层考量
那么问题来了:比如我选这个点(指一个离稳定圆很近但仍在稳定区内的点)。哎,老师,我这里也是稳定的啊!我这里也很稳啊!为什么我一定要选离它远一点的那个点呢?为什么我这个点就不行?
这就好比职场新人和老板的对话。六七年级的新人很喜欢说:"老板,这很好啊,这有什么不好?" 心直口快,这可能是你们的写照。但老板的火气可能马上就上来了。然后你还不懂:"老板你为什么要发火?理论告诉我这里很好啊!"
你觉得老板会给你什么答案?老板可能会说:"好,你要尊重是吧?产品有任何问题,你负不负责?" 听到这话,你大概就怂了:"老板,我选那个点(离得远的)就是了。"
事后你再去问老板为什么。五年级的老板从小被三四年级的欺负到大,他们超级会保护自己,做事非常严谨,绝对会再三考虑,不允许出任何纰漏。
我来问你:你设计放大器的时候,前后级接的是什么?都是理想的50欧姆,对吧?你设计好了,这点(离稳定圆近的点)确实在稳定区。但等你真正做完,去接别人的电路时,别人的电路还是理想的50欧姆吗?怎么可能!你这个点在实际应用中还会乖乖待在这里吗?才不会!它可能"嗖"一下就跑到不稳定区里面去了。然后整批货都不用出了。
再比如,你从台湾做好卖到美国,温度降到零下40度,这个点"啾"一下又跑进去了,你怎么知道是为什么?所以问题太多了,你不能考虑得那么简单。
还有,你在实验室做原型机,做了5颗,5颗都能用。一到生产线量产,良率"啪"掉到60%。老板问你:"你不是说5颗都能用吗?怎么良率只剩60%?" 一查,糟糕。元器件没有误差吗?随便也有5%的误差。你的匹配点不小心就跑到不稳定区里了。
种种因素告诉你,如果能避开,就一定要想清楚前因后果。最稳妥的方法才是最好的。所以选离稳定圆远的地方,就算有误差、温度变化、人为因素,它跳进不稳定区的概率也是最低的。
所以,在做设计时要考虑到各种现实因素。到了业界,不要只跟老板说"我老师以前说理论上这样可行"。理论和实际之间还隔着无数"天灾人祸"。在做学问的时候就要考虑得更周全一点,这样才能和你的老板有效沟通。在"班门弄斧"之前要想清楚,老板的经验绝对比你老练。
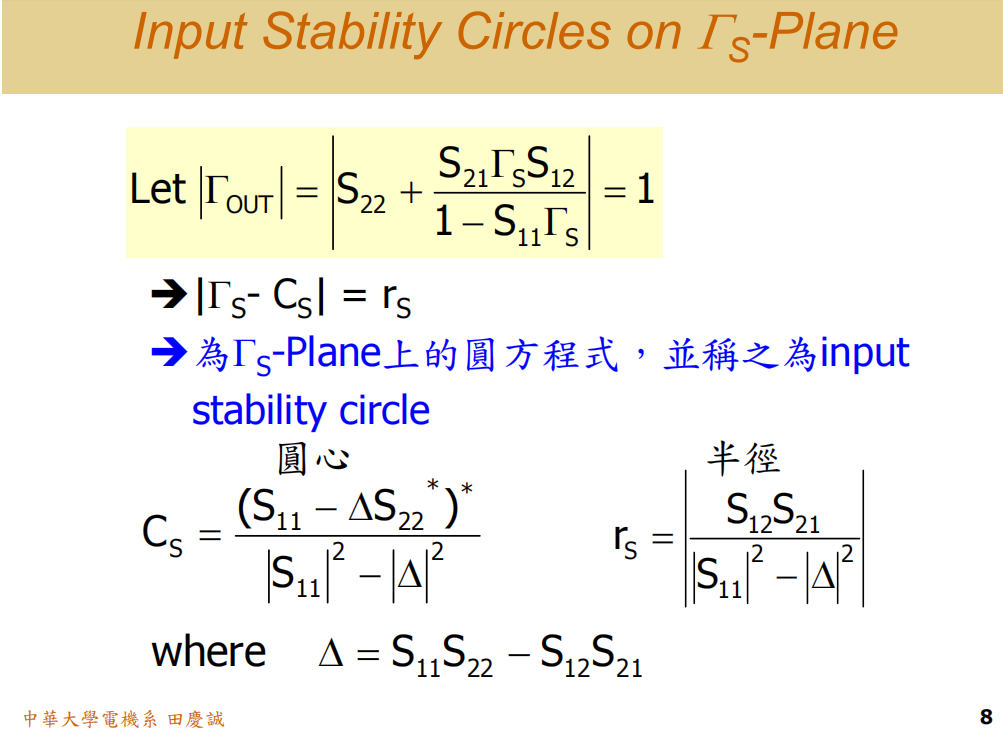
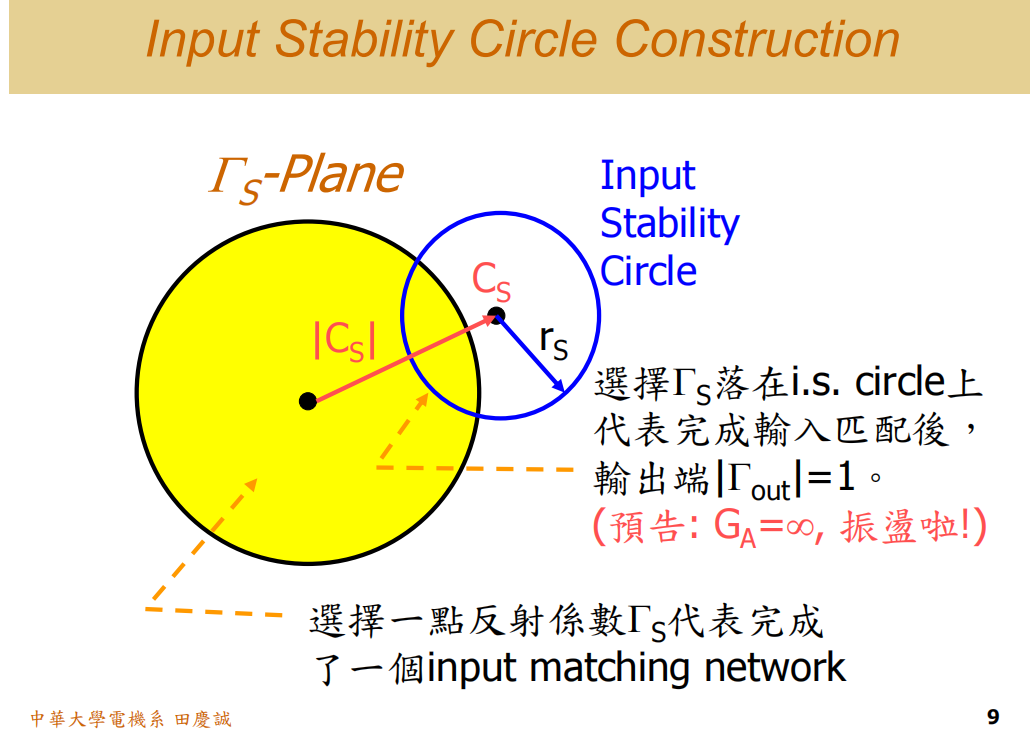
输入稳定圆(Input Stability Circles)
接下来是输入稳定圆,这个就没什么问题了。
输入稳定圆定义在 ΓSΓ_SΓS平面 上。它规范的是我的 ΓSΓ_SΓS 应该如何选择。同样,要记住它的物理意义:如果你的 ΓSΓ_SΓS选在了这个输入稳定圆上,代表什么?那你的 ΓOUTΓ_{OUT}ΓOUT 的模值会等于 1 ,输出端会变得不稳定 。所以这个圈圈是在警告你:你做的输入匹配 ,可能会导致输出不稳定。
同样,圆心半径公式都给你,看结果就行。
我们再复习一遍。未来你们用软件模拟,看到它画出的稳定圆,第一件事就是要判断:这个圆是在哪个平面?是 ΓSΓ_SΓS平面还是 ΓLΓ_LΓL平面?软件通常不会直接告诉你,你需要自己判断。
在ΓSΓ_SΓS平面上取一点代表什么?代表你完成了一个输入匹配网络 。如果你设计完输入匹配,发现工作点落在这个输入稳定圆上(或圆内不稳定区),那就代表:很抱歉,你的输出端开始不稳定了。
预告一下,如果我们设计低噪声放大器 ,一般就是做最小噪声系数设计。它唯一的变量就是前级的ΓSΓ_SΓS。你为了得到最低的噪声,结果选到了这个点上。"我的噪声好低啊!" 结果呢?电路变成了一个振荡器,一个"低噪声振荡器"!太棒了!本来是做低噪声放大器,结果成了低噪声振荡器。如果你选择在这一点,对于可用功率增益来说,它绝对是无限大的。
所以,你在选择ΓSΓ_SΓS的时候,也请你离开输入稳定圆越远越好 。同样,在这个区域(指向图示中离输入稳定圆较远的区域)可能是比较好的选择,会更稳定一些。
1.5 判断稳定区域
这个圈圈有分里面和外面,那到底是里面稳定还是外面稳定呢?
接下来我们就来学习一个判断的方法。
首先,我们要记得在 ΓLΓ_LΓL平面上画出来的圈圈是什么?
是 Output Stability Circle(输出稳定圆)
那么,我们要如何判断这个圈圈的内部和外部,哪一边是稳定的呢?
其实我们只需要判断一个点------原点,只要看这一点就够了,其他部分暂时不用管。
好,我们来看原点。选择这一点有什么物理意义呢?我这样做代表了什么?是做了 Input Matching(输入匹配)还是 Output Matching(输出匹配)呢?
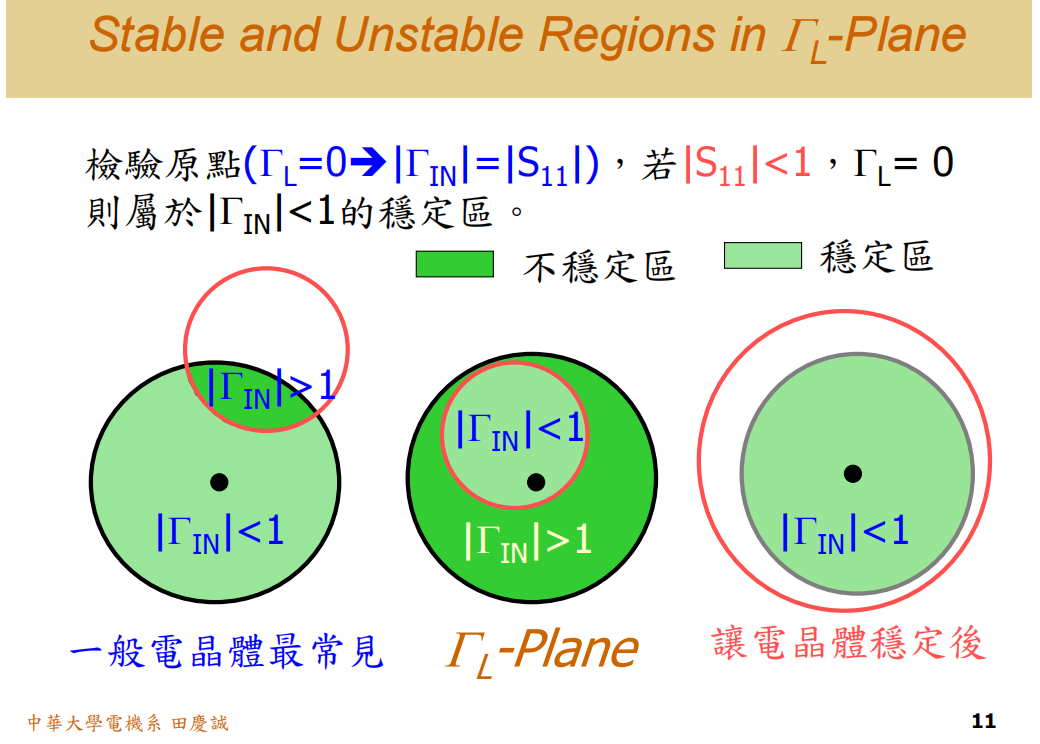
我选择了 ΓLΓ_LΓL 平面上的一点,这一点是ΓLΓ_LΓL = 0。
ΓLΓ_LΓL = 0 代表什么?
代表我不需要做任何输出匹配电路,直接接上 50 欧姆负载就可以了 。也就是说,我把输出端直接接上 50 欧姆,就对应到这一点。
那么,当 ΓLΓ_LΓL = 0 时,ΓINΓ_{IN}ΓIN等于多少呢?
代入公式,剩下的就是 S11S₁₁S11,也就是说 ΓIN=S11Γ_{IN} = S₁₁ΓIN=S11。
那这时候就会有两种情况,第一种情况是S11S₁₁S11大于1,第二种情况是S11S₁₁S11小于1
我们先来看第一种情况,假设晶体管的S11S₁₁S11大于 1,那这代表什么意义呢?
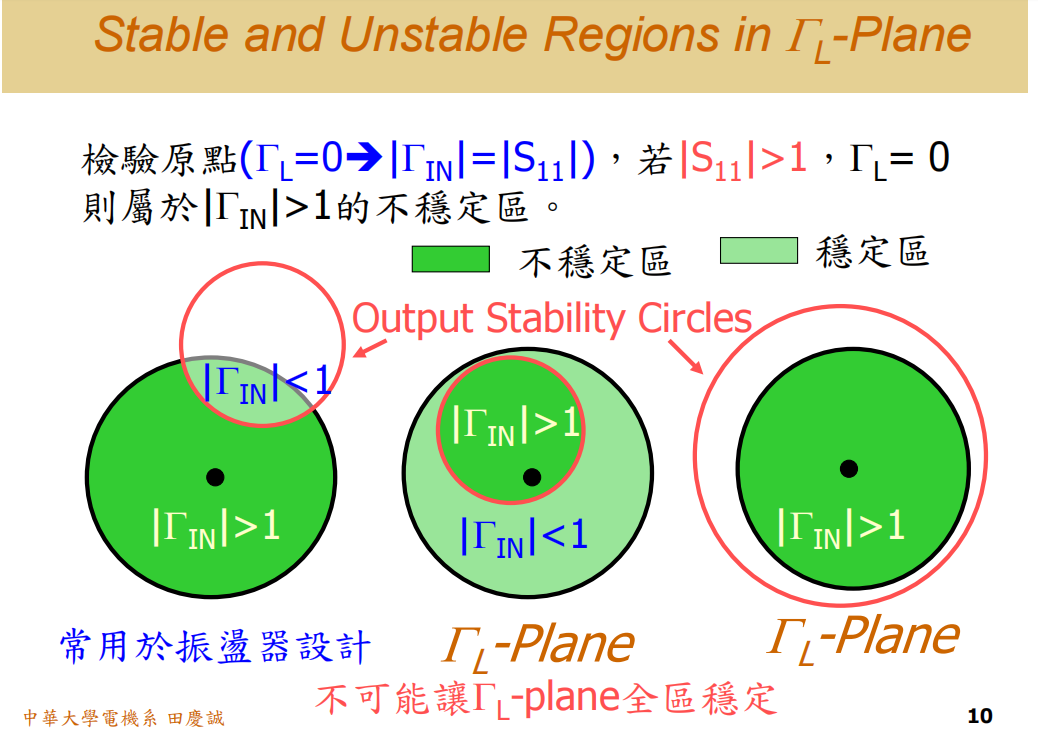
在 ΓLΓ_LΓL = 0 这一点,ΓINΓ_{IN}ΓIN = S11S₁₁S11,而 S11S₁₁S11 > 1,
那就意味着ΓINΓ_{IN}ΓIN > 1
而我们之前学过,这个圈圈的边界对应 ΓINΓ_{IN}ΓIN = 1。(输出稳定圆就是根据 ΓINΓ_{IN}ΓIN = 1所画出来)
既然原点的 ΓINΓ_{IN}ΓIN > 1,那就说明原点所在区域是不稳定的 。
所以,其实整个平面就被圆圈边界分成了两个区域,包含原点的区域就是不稳定区,剩下部分才是稳定区 。我们只需要看原点那一点就好了。
那么,有没有可能实现无条件稳定呢?有没有可能整个区域都稳定?
如果晶体管的 S11S₁₁S11 大于 1,我们说那就不可能实现无条件稳定。
这时候该怎么办呢?
我们可以通过添加电阻来吸收多余的能量 ,把 S11S₁₁S11 降下来,让它小于 1,这样才有可能实现稳定。其实就是把多余的能量吸收掉,让反射系数降下来。
这种 S11S₁₁S11 > 1 的情况常用于振荡器设计。在这种情况下,无论你怎么选择 ΓLΓ_LΓL,几乎整个区域都不稳定。这种特性反而使得设计振荡器的成功率更高。
所以,不稳定区域越多,越适合设计振荡器 。
不过这种 S参数特性比较少见,更常见的还是我们之前讲的第二种情况,S11S₁₁S11 < 1 的情况更为常见。
一般用于放大器的晶体管,S11S₁₁S11 大多小于 1。
不过也有例外,比如某些功率放大器的 S11S₁₁S11 可能会大于 1,这也是功率放大器设计难度高的原因之一,当输出功率超过 1 瓦时,晶体管很容易产生振荡,设计不当就会振荡。
而一般小信号晶体管的 S11S₁₁S11 都小于 1,这点大家可以放心。
好,回到原点判断法。
当 ΓLΓ_LΓL = 0 时,如果 S11S₁₁S11 < 1,那么 ΓINΓ_{IN}ΓIN < 1,
所以原点处于稳定状态。
因此,包含原点的区域就是稳定区 ,也就是浅绿色部分。
如果我们能够将这个输出稳定圆推出去,使得整个ΓLΓ_LΓL史密斯圆图都处于稳定区,那就实现了无条件稳定。
那么 ΓSΓ_SΓS平面呢?原理是一样的。
在 ΓSΓ_SΓS 平面上,如果你随意选择 ΓSΓ_SΓS,可能会使得 ΓOUTΓ_{OUT}ΓOUT大于等于 1,导致输出不稳定,触发振荡条件。
在ΓSΓ_SΓS 平面上,我们对应的是 Input Stability Circle(输入稳定圆)。
如果 S22S₂₂S22 > 1,那么原点(ΓSΓ_SΓS = 0)就不稳定,对应的深橘色区域都是不稳定的。
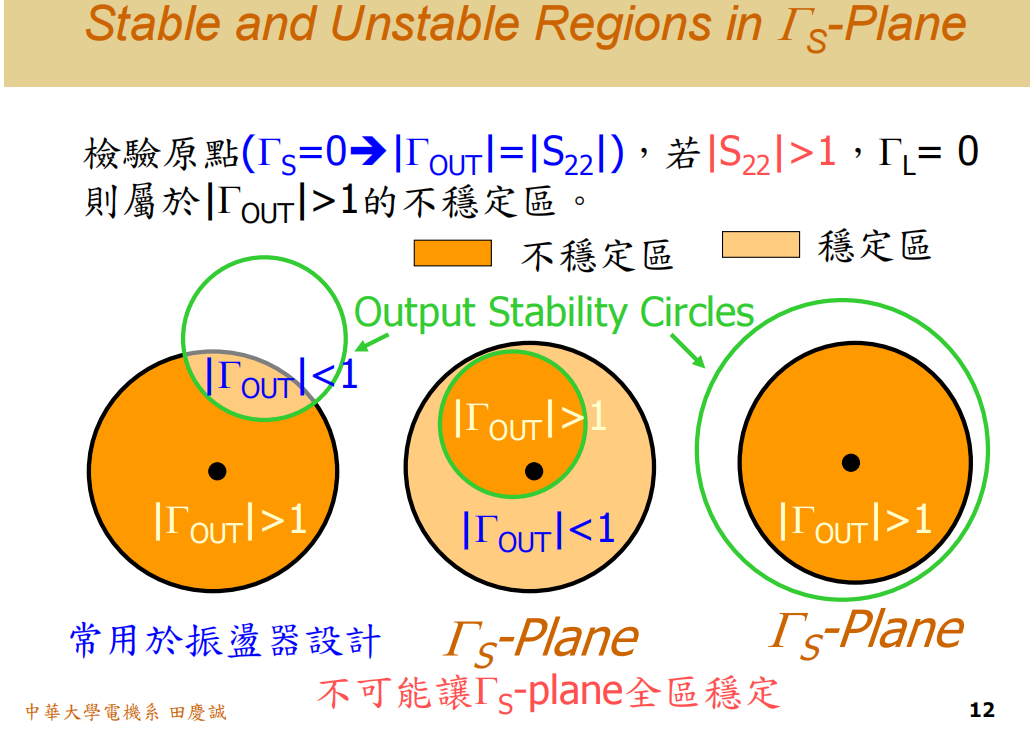
而如果 S22S₂₂S22 < 1(这种情况更常见),那么当ΓSΓ_SΓS = 0 时,ΓOUTΓ_{OUT}ΓOUT = S22S₂₂S22 < 1,所以原点是稳定的,进一步说,包含原点的浅橘色区域都是稳定区。
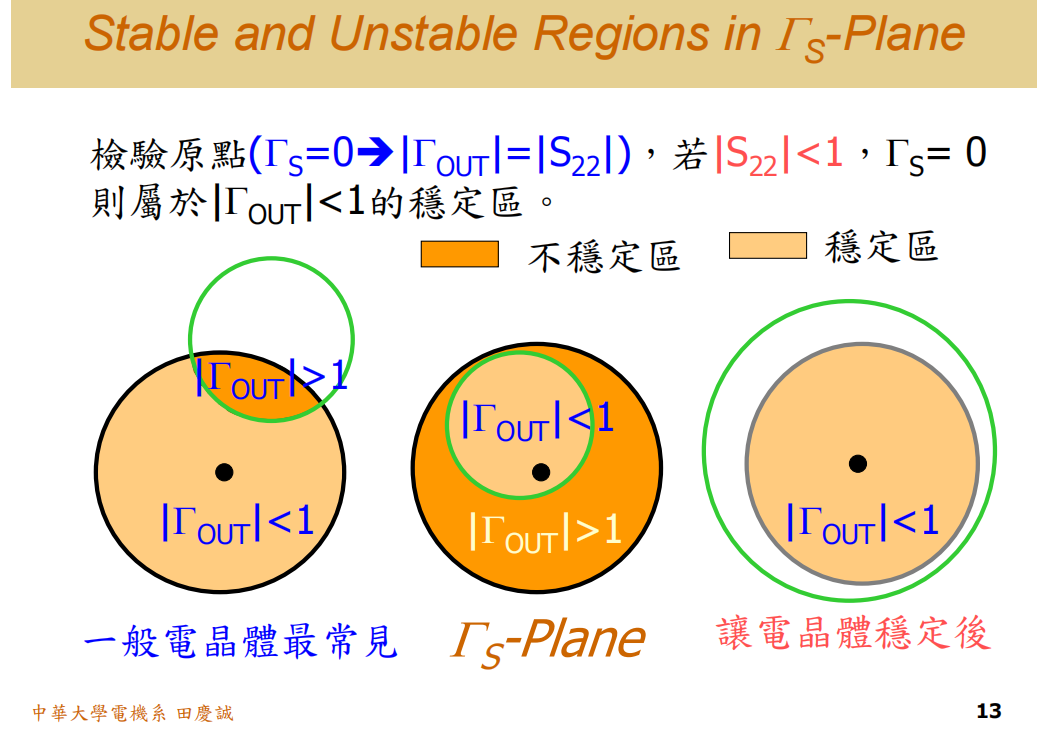
此时我们的目标就是将这个输入稳定圆推出去,使得整个ΓSΓ_SΓS平面都稳定。这样,无论怎么设计输入匹配网络,都不会引发振荡。
接下来,我想向大家证明一个重要的概念。
曾经有同学问:"老师,有没有可能前级不稳定,但后级稳定?或者反过来,后级不稳定,但前级稳定?有没有一种振荡器是前级振荡,后级不振荡的?"
实际上,振荡是不分前后级的。你从电路的任何一个地方接出来,它都会振荡。因为整个电路一旦满足振荡条件,任何一个截面都会振荡。
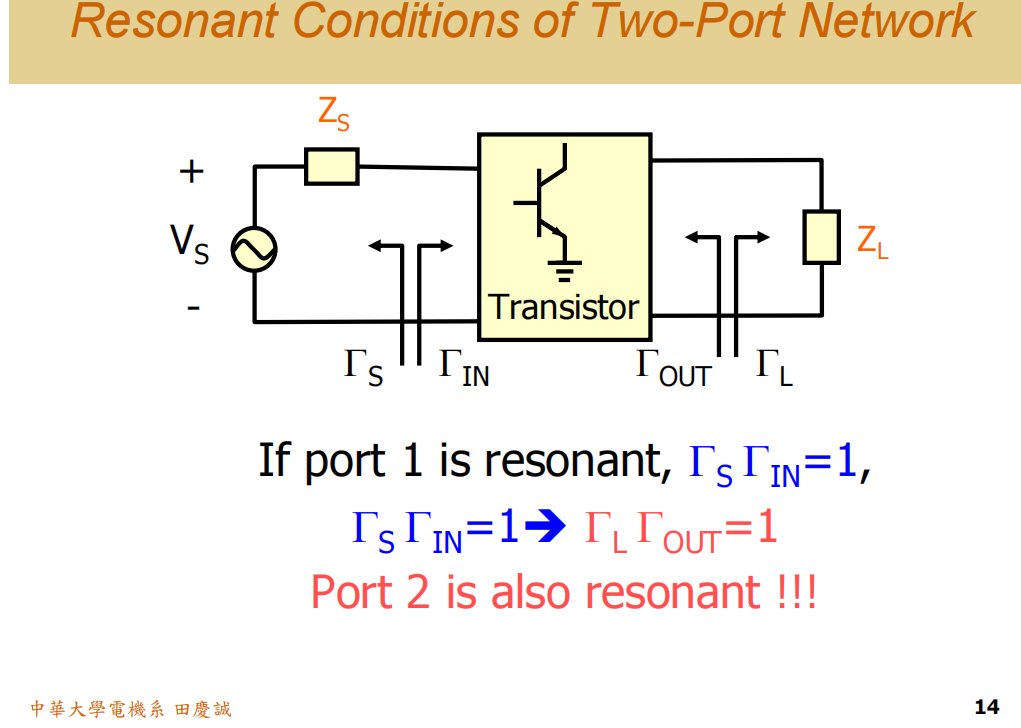
我来证明给大家看:
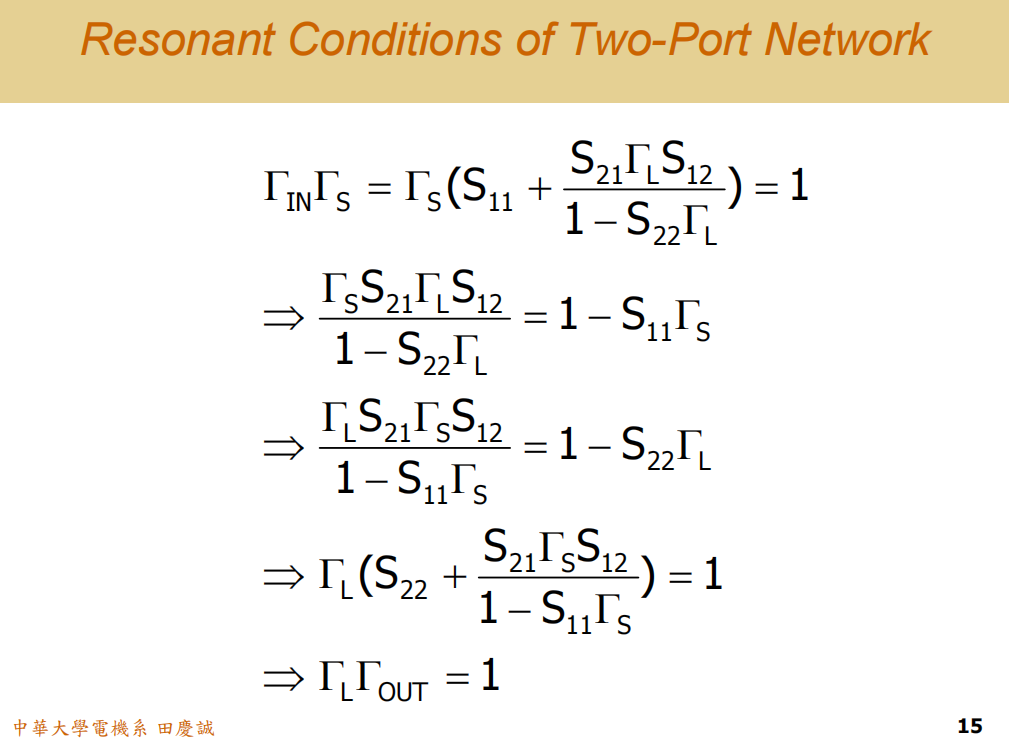
已知当 ΓINΓ_{IN}ΓIN ∙ ΓSΓ_SΓS = 1 时,满足振荡条件。
我们可以推导出,在另一个截面,ΓOUTΓLΓ_{OUT} Γ_LΓOUTΓL 也等于1。
这意味着,如果前级振荡,后级也绝对无法幸免,整个电路都会振荡 无论你在哪个位置截取,都会满足振荡条件。这就是振荡条件的传递性。
根据这个原理,我们在设计电路时,ΓLΓ_LΓL 和 ΓSΓ_SΓS 都是我们自己选择的。那么,我们是否需要分别在 ΓSΓ_SΓS 平面和 ΓLΓ_LΓL 平面上都进行稳定圆推出去的操作呢?是否需要做两次?
其实,只需要做一次就够了。
本质原因就在于:输入和输出的稳定性是相互关联、成对出现的
左边这是 ΓSΓ_SΓS 平面上的 Input Stability Circle,右边是ΓLΓ_LΓL平面上的 Output Stability Circle。
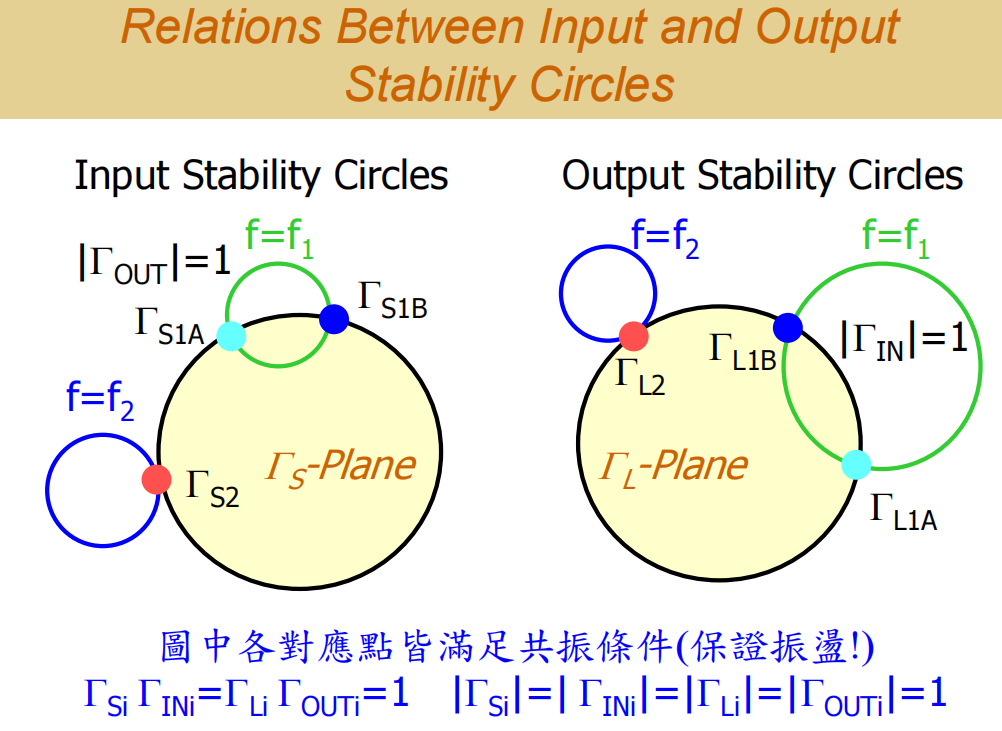
假设我们在 ΓSΓ_SΓS平面上选择了一个"危险点"(这个点会导致输出端 ΓOUTΓ_{OUT}ΓOUT > 1,不稳定)。那么,在 ΓLΓ_LΓL平面上,必然存在一个对应的"危险点"(这个点会导致输入端 ΓINΓ_{IN}ΓIN > 1,不稳定)。
如果我们同时选择了这一对"危险点",那么电路就完全满足了振荡条件,必然会产生振荡。
同理,如果在稳定区内选择对应的点,也是一样的道理,稳定点也是成对出现的。
由于这种危险的成对性,两个稳定圆的"行为"是同步的:
当电路处于潜在不稳定状态时,两个稳定圆都有一部分在史密斯圆图单位圆之内。(存在相同的危险区域)
当我们通过设计(比如添加稳定电阻或调整匹配电路)将其中一个稳定圆完全推出史密斯圆图时,电路就达到了"无条件稳定"状态。
此时,另一个稳定圆也会自动地、同步地被完全推出史密斯圆图 .(保证没有危险点对应)
所以,我们只需要在一个平面上进行操作就可以了。比如,只需要在输入匹配设计时确保稳定,输出匹配就不需要再做了。
1.6 实际例子说明
来,我们看一个具体范例。建议大家回去用 ADS 软件来做,我这里是用 Microwave Office 演示的。
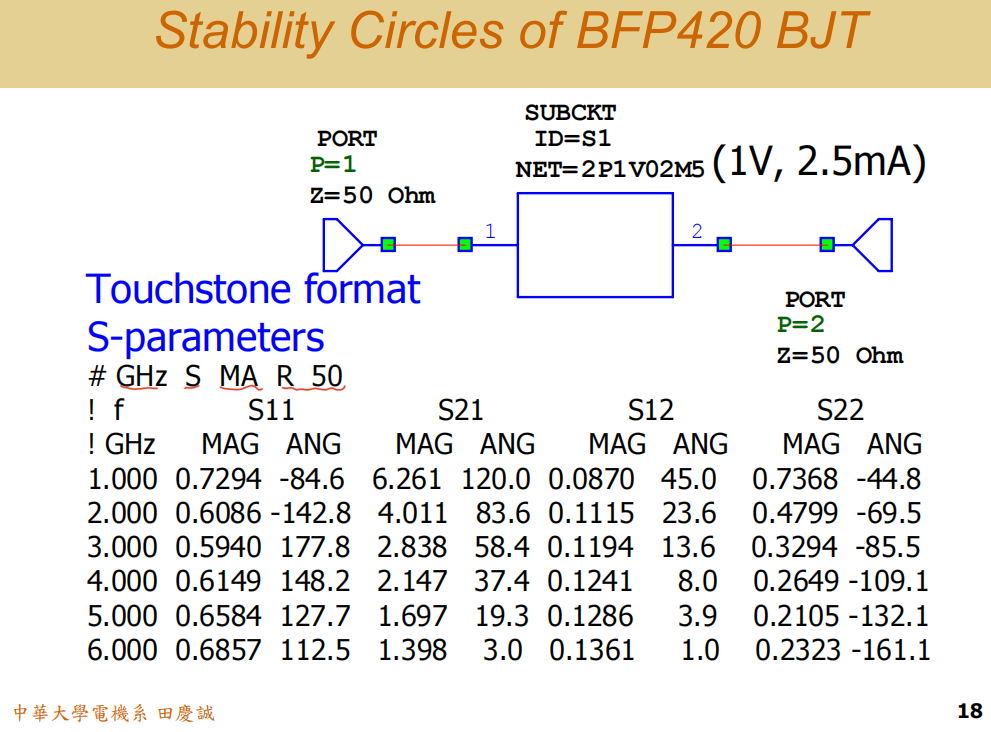
首先,我们调用一个晶体管的 S 参数模型。这里的关键是正确编写 S 参数文件:
- 第一行以
#开头,接着指定频率单位,比如 GHz, Hz, kHz 等。 - 然后声明参数类型,是 S、Y 还是 Z 参数?我们这里当然是 S 参数。
- 接下来定义 S 参数的格式,常见的有:
MA:幅度和相位RI:实部和虚部DB:幅度为 dB 值,后面跟相位
我们这里简写为DB即可。
- 最后,指定参考阻抗,通常是 50 欧姆。这表示 S 参数是在 50 欧姆系统下测量的。
这个范例中,晶体管的 S 参数频率范围是从 1 GHz 到 6 GHz。我们使用的晶体管是 BFP420,一种硅基晶体管,偏置点在 2.5 mA。
疑问:晶体管S参数只涵盖了1-6GHz的范围,但低频稳定性恰恰是关键。没有低频S参数,我们该如何评估?
如果仅使用1-6GHz的S参数,软件在模拟低频时会通过多项式拟合外推数据。这种基于3GHz、2GHz、1GHz等高频率点去拟合低频特性的方法,其结果基本不准确,没有参考价值。因此,S参数在1-6GHZ区间内的拟合是有效的,但向更低或更高频率外推得到的S参数则不可靠。
最有效的方法是找到并使用该器件的奈奎斯特模型。奈奎斯特模型在低频段的精度通常足够高,可以接受。通过这种方式,我们就能获得可信的低频参数,进而检查低频段的稳定性。
请注意: 当你查找一个晶体管的 S 参数时,会发现它往往提供十几组不同的数据。这是因为 S 参数会随偏置点变化而变化。所以,同一个晶体管在不同偏置下会有不同的 S 参数。
准备好 S 参数文件后,我们在软件中将其前面连接一个 port 1,后面连接一个 port 2。这样,软件就可以开始进行计算了。
接下来,我们让软件画出 Output Stability Circle(输出稳定圆)。结果如下:
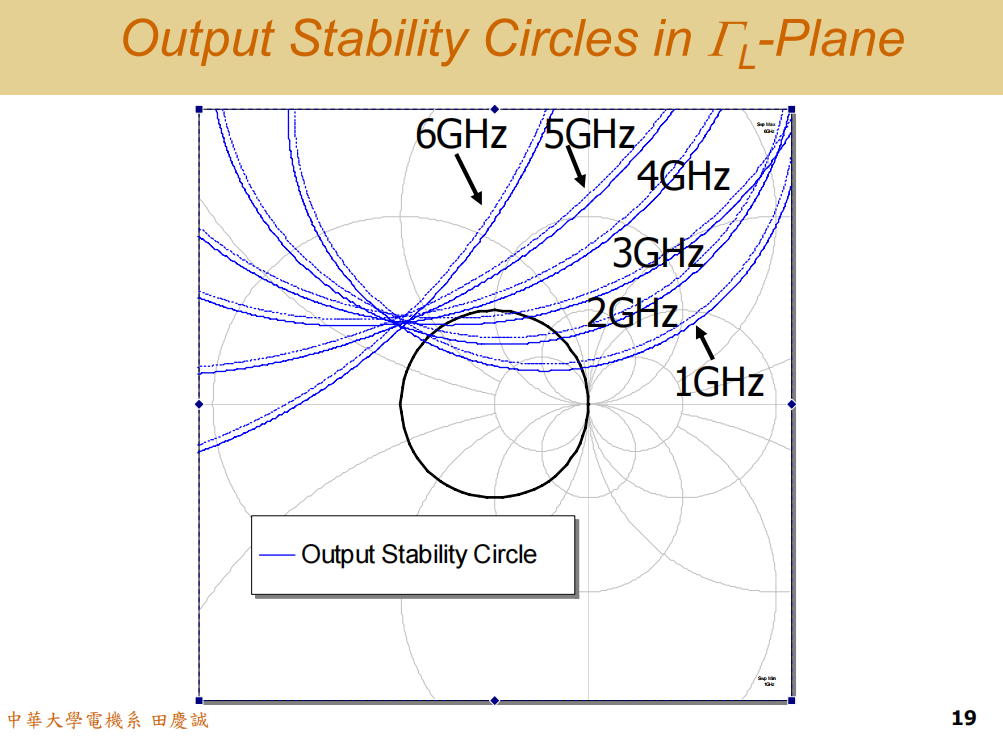
图中这个黑色的、半径为 1 的圆,就是我们的 ΓLΓ_LΓL平面(史密斯圆图)。
- 在 1 GHz 时,稳定圆出现在这个位置。
- 这时,我们需要判断哪一区是稳定区?是上面还是下面?
根据我们前面所说,在 ΓLΓ_LΓL 平面上,这个稳定圆的边界对应的是 ΓINΓ_{IN}ΓIN = 1。要判断稳定区,我们需要看 S11S₁₁S11。
- 在 1 GHz 时,S11S₁₁S11 大约是 0.7,小于 1。S22S₂₂S22 也同样小于 1。
- 频率越低,反射系数通常越大,电路越趋向于不稳定。
- 因为 S11S₁₁S11 < 1,所以包含原点的区域是稳定区 。软件会用虚线标示 出不稳定区。
一个重要的规律:频率越高,晶体管越趋向于无条件稳定。
- 到 2 GHz 时,稳定圆开始向外移动。
- 3 GHz 时,它快要移出单位圆了。
- 4 GHz 时,它已经完全移到单位圆外面了。这时电路就达到了无条件稳定。
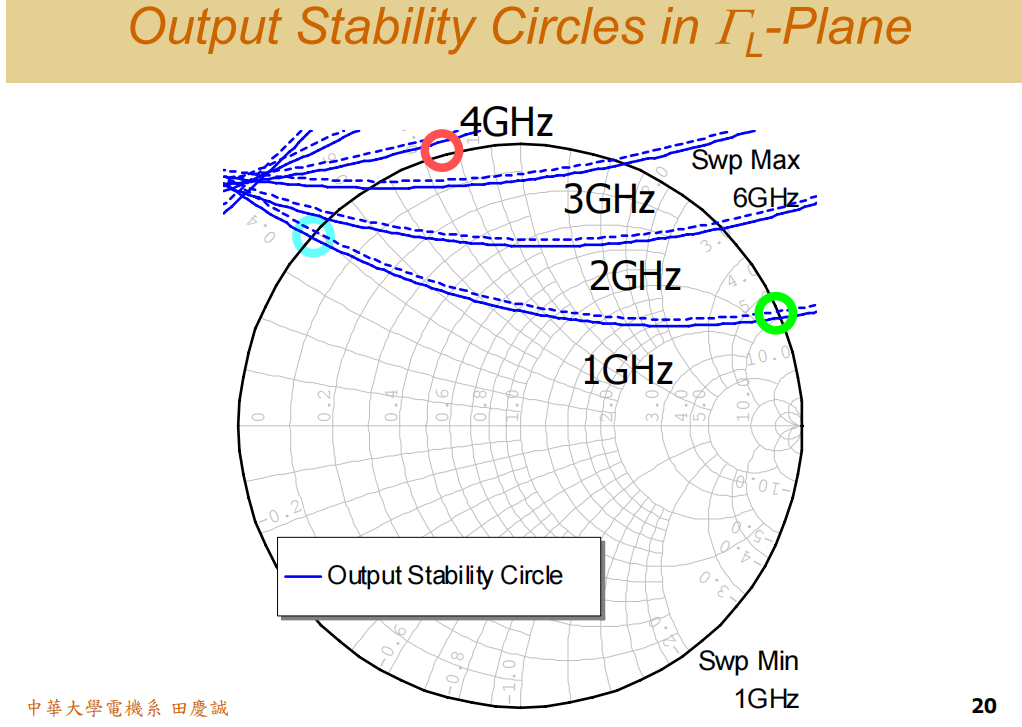
请大家自己调整频率,找到在 3.8 GHz 左右,稳定圆刚好与单位圆相切的那个点。
接下来,我们画出 Input Stability Circle(输入稳定圆)。
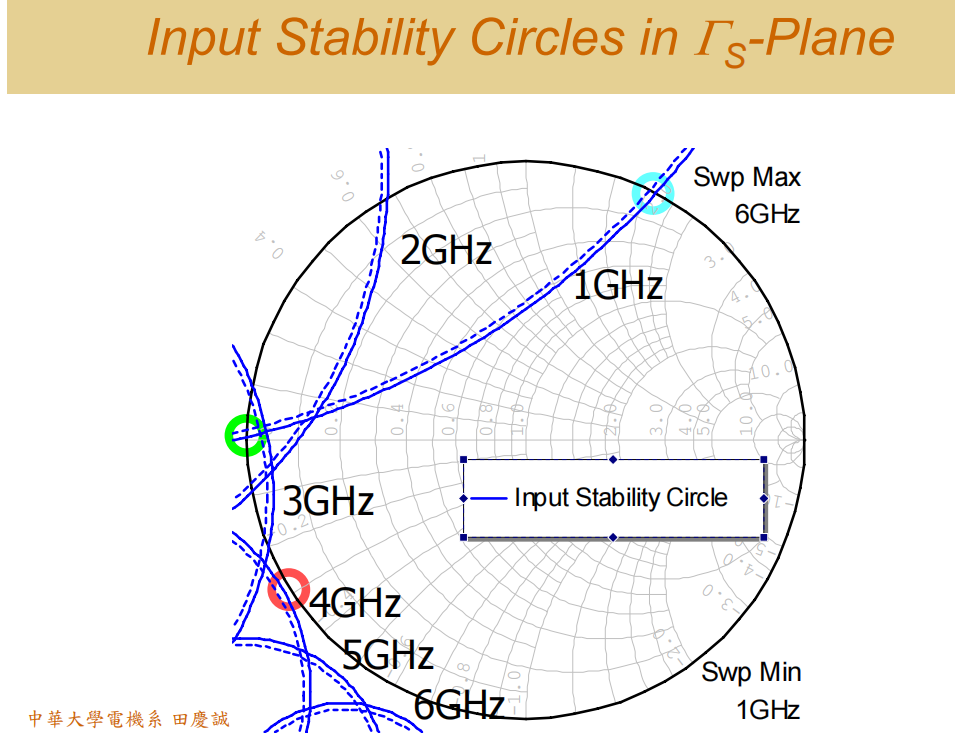
- 在 1 GHz 时,输入稳定圆上的点会与输出稳定圆上的点一一对应。
- 请大家将这些对应点的反射系数(ΓIN,ΓOUT,ΓS,ΓLΓ_{IN}, Γ_{OUT}, Γ_S, Γ_LΓIN,ΓOUT,ΓS,ΓL)都计算出来,并验证它们是否满足振荡条件。
这个范例也清晰地展示了:当输入稳定圆(红色)被推出单位圆时,输出稳定圆(蓝色)也同步被推出。请大家务必用软件验证这一点。
1.7 数学判据:K-Δ 与 μ 因子
以上是图解法,接下来我们学习更常用的数学判断法 ------直接用稳定性因子来判断,这在实际工程中更为高效。
首先,我们学习无条件稳定的充要条件 。这意味着条件和结论是双向的:如果电路无条件稳定,则下列条件成立;反之,如果下列条件成立,则电路无条件稳定。
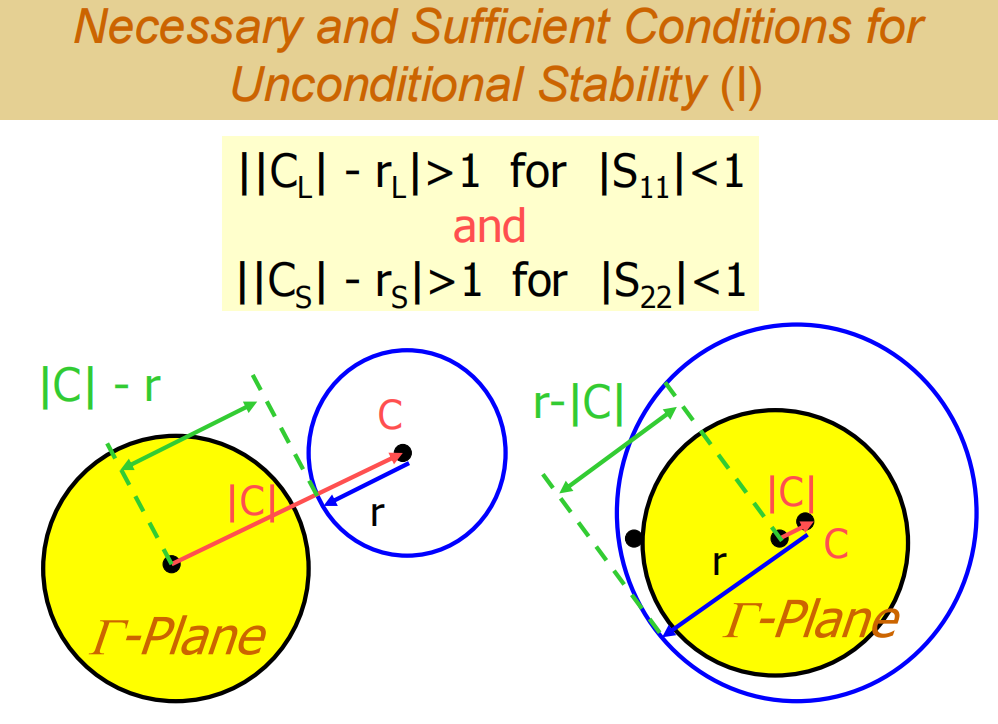
总共有四个条件需要同时满足:
- |S11S₁₁S11| < 1
- |S22S₂₂S22| < 1
- |CL∣−∣RLC_L| - |R_LCL∣−∣RL| > 1 (对于 ΓLΓ_LΓL 平面)
- |CS∣−∣RSC_S| - |R_SCS∣−∣RS| > 1 (对于 ΓSΓ_SΓS 平面)
解释一下:
- 如果 |S11S₁₁S11| 或 |S22S₂₂S22| 大于 1,电路绝不可能无条件稳定。必须先通过加电阻等方法将它们降到 1 以下。
- |CLC_LCL| 是ΓLΓ_LΓL平面上稳定圆的圆心到原点的距离,|RLR_LRL| 是稳定圆的半径。|CLC_LCL| - |RLR_LRL| > 1 意味着稳定圆被完全推出了单位圆。
由于输入和输出稳定性是同步的,一个稳定圆被推出,另一个必然也被推出。因此,我们只需要验证其中一组条件即可(如1,3或者2,4) ,无需四个全部检查。
为此,我们引入一个参数 μ。
- μ1 是针对输出稳定圆的,它确保 ΓINΓ_{IN}ΓIN = 1 的圆被推出。
- μ2 是针对输入稳定圆的,它确保 ΓOUTΓ_{OUT}ΓOUT = 1 的圆被推出。
- 关键结论: 只要 μ1 > 1 ,就必然有 μ2 > 1 。反之亦然。所以实践中,我们只需计算 μ1 或 μ2 中的一个即可。
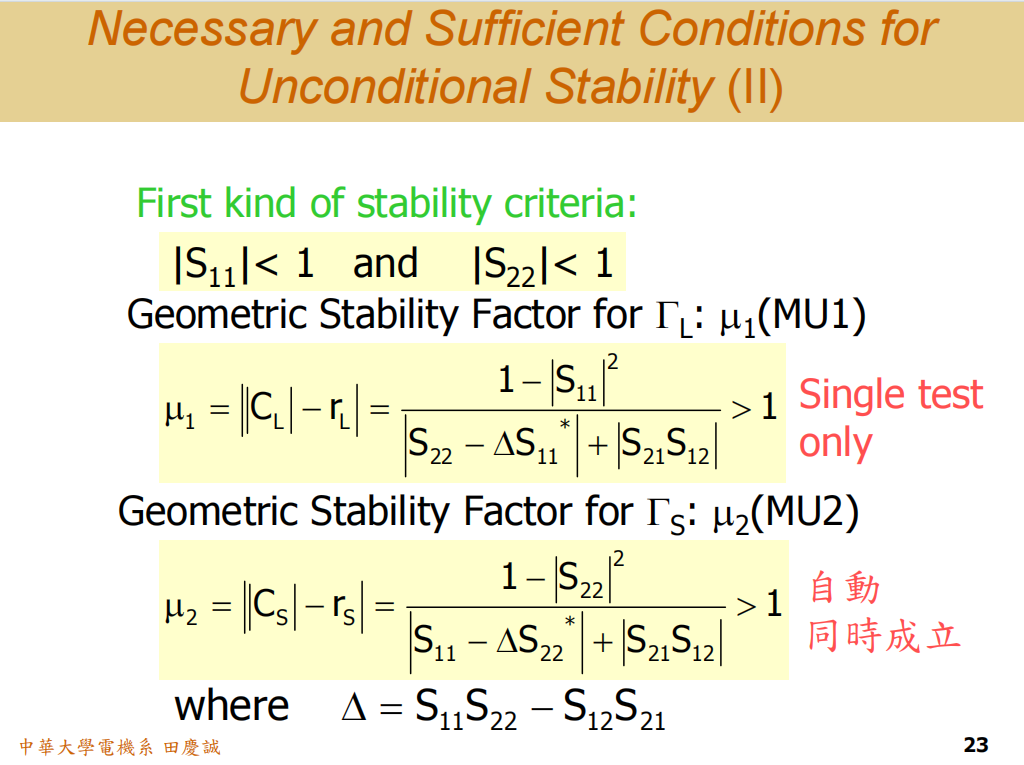
因此,简化的数学判断法只需要三个条件:
- |S₁₁| < 1
- |S₂₂| < 1
- μ1 > 1 (或 μ2 > 1)
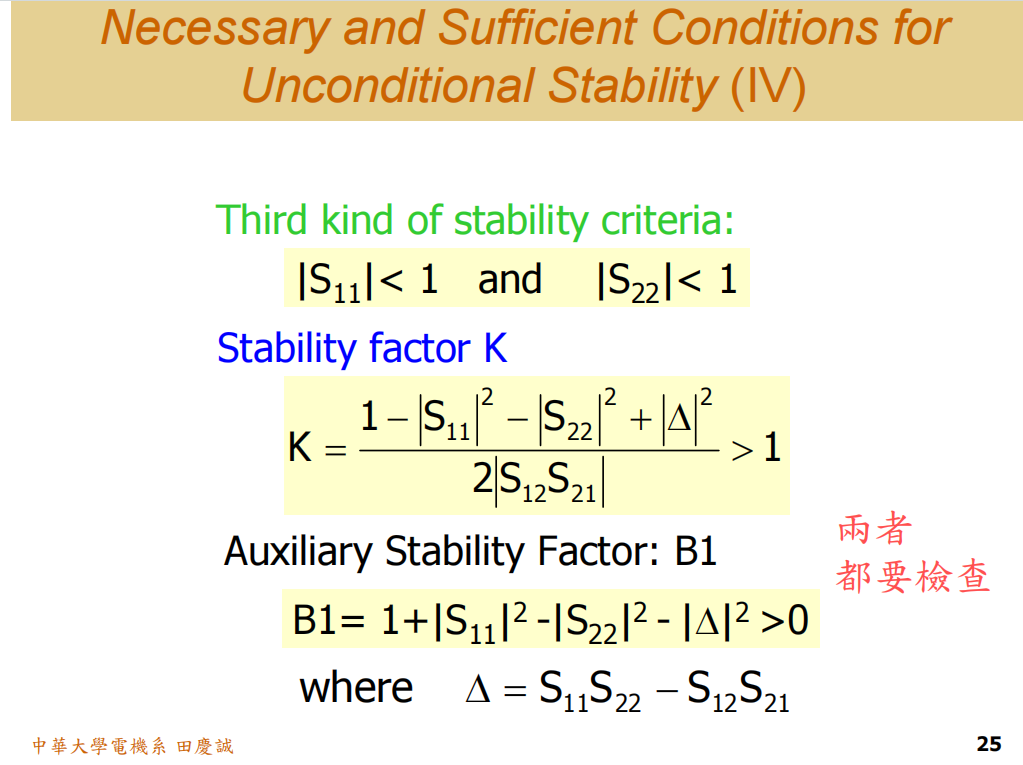
第二种,也是最常用的方法 是使用 稳定性因子 K。
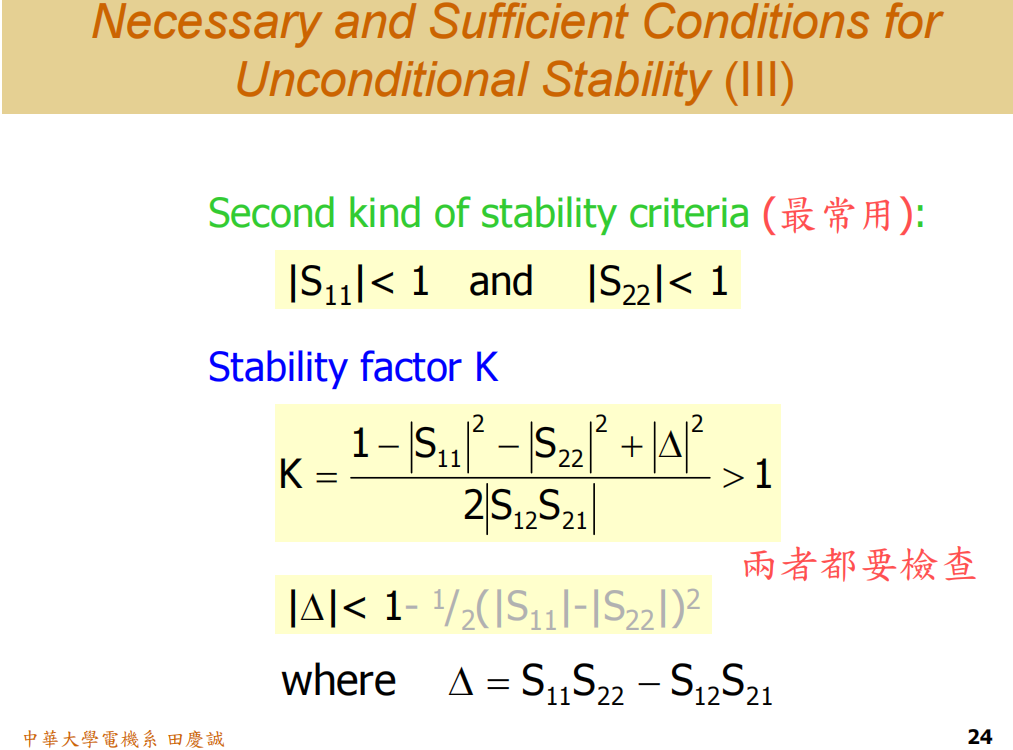
前提同样是 |S₁₁| < 1 和 |S₂₂| < 1。
然后计算 K 因子,要求 K > 1 。
同时,还需要一个辅助条件,通常要求 |Δ| < 1 (其中 Δ=S11S22−S12S21Δ = S₁₁S₂₂ - S₁₂S₂₁Δ=S11S22−S12S21)。
请注意: 很多教材会忽略 |Δ| < 1 这个条件,但严谨的设计必须两者同时检查。仅满足 K > 1 是不够的。
除了 |Δ| < 1外,我们还可以验证另外一个参数B1,同样在 |S11S₁₁S11| < 1 的前提下,要求 B1 > 0。这个因子在处理共轭匹配时非常有用。
练习:
请大家根据我的方法,绘制出 μ1, μ2, K 和 B1 随频率变化的曲线。
- 在低频(如 1 GHz),你会发现 μ < 1,K < 1,这表示不稳定。
- 随着频率升高,在 ~4 GHz 附近,μ 和 K 会同时等于 1。这一点正好对应输出稳定圆与单位圆相切。
- 频率再升高 ,μ > 1,K > 1,B1 > 0,电路进入无条件稳定区。
这个练习能让你直观地理解稳定性如何随频率变化。我强烈建议大家把所有这些图表都亲手做一遍,印象会更加深刻。除了图形化方法,我们还可以用数学公式来精确判断。
1.8 实际例子说明
当我们拿到一个晶体管,第一步要测量和分析什么?就是下面这张图,大家必须先把这张图搞懂。
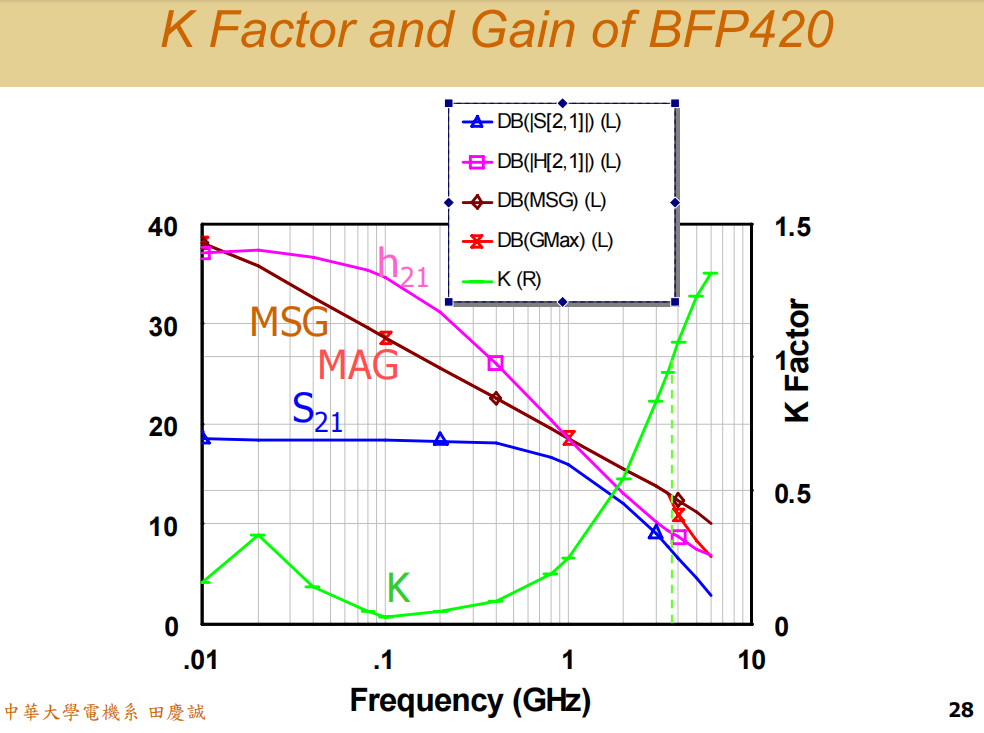
之前我们已经教过 MSG(最大稳定增益) 的计算方法:MSG=∣S21∣∣S12∣MSG = \frac{|S₂₁|}{|S₁₂|}MSG=∣S12∣∣S21∣,然后dB值取10∗log10(mag)10*log10(mag)10∗log10(mag)。
还有 MAG(最大可用增益) ,它的公式是 MAG=∣S21∣∣S12∣∗(K−K2−1)MAG = \frac{|S₂₁|}{|S₁₂|} * (K - \sqrt{K² - 1})MAG=∣S12∣∣S21∣∗(K−K2−1 )。
S参数可以转换成其他参数,比如 H参数 。h21h₂₁h21其实就是S21S₂₁S21。当频率降低时,h21h₂₁h21会掉到 0 dB(也就是增益为 1)的频率点,这个频率被称为 ftfₜft(截止频率) 。
那么,S21S₂₁S21掉到 0 dB 的频率叫什么?叫 fsfₛfs ,但这个不常用,更常用的是 fmaxfₘₐₓfmax(最大振荡频率) 。
问题来了:这颗晶体管的 fmaxfₘₐₓfmax 是多少?
我们现在只有到 6 GHz 的 S 参数,后面的数据无法计算,算出来也不准。那我们怎么把这条曲线延伸下去呢?
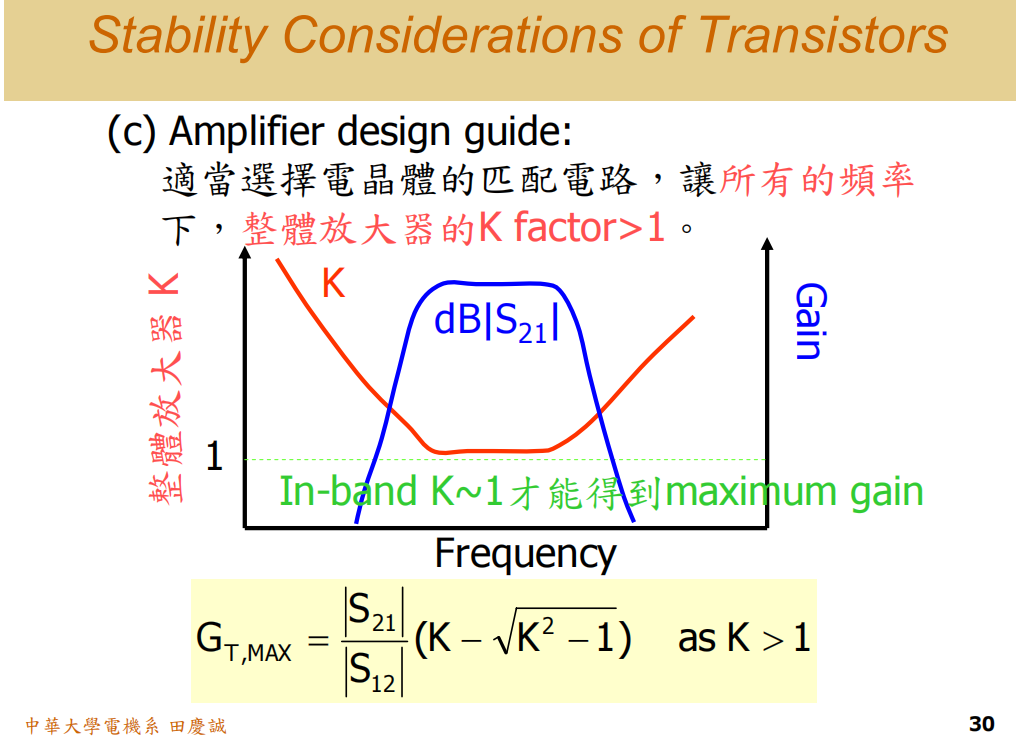
我们来看这张图。红色的曲线代表 MAG 。大家有没有发现一个奇怪的现象:红色曲线只在某一段频率之后才出现?而且,它恰好是从 K > 1 的那个点开始出现的。
为什么会分开?
根据 MAG 的公式,当 K < 1 时,公式里的 K2−1\sqrt{K² - 1}K2−1 会变成对负数开根号,结果是个虚数!增益怎么可能有虚数呢?所以,当 K < 1 时,MAG 实际上不存在 。
那么软件画的是什么呢?在 K < 1 的区域,软件通常画的是 MSG 。所以在那段频率里,红色和咖啡色的曲线其实是重合的。只有当 K > 1 之后,它们才分开,这时 MAG 才真正存在。
另一个问题:为什么 MAG 会比 MSG 低?
看公式,当 K > 1 时,(K−K2−1)(K - \sqrt{K² - 1})(K−K2−1 ) 这项必然小于 1。所以,稳定之后你能实际获得的最大可用增益,会比最大稳定增益要低。晶体管真正的增益能力就是这条红色曲线。
这条红色曲线的下降斜率是多少?大约每倍频程下降 6 dB。根据这个斜率,我们可以反推估算出,这颗 BJT 的 fmaxfₘₐₓfmax 大约在 10 GHz 左右。
这张图告诉我们什么?
很多人看图没感觉,我来总结几个关键结论:
-
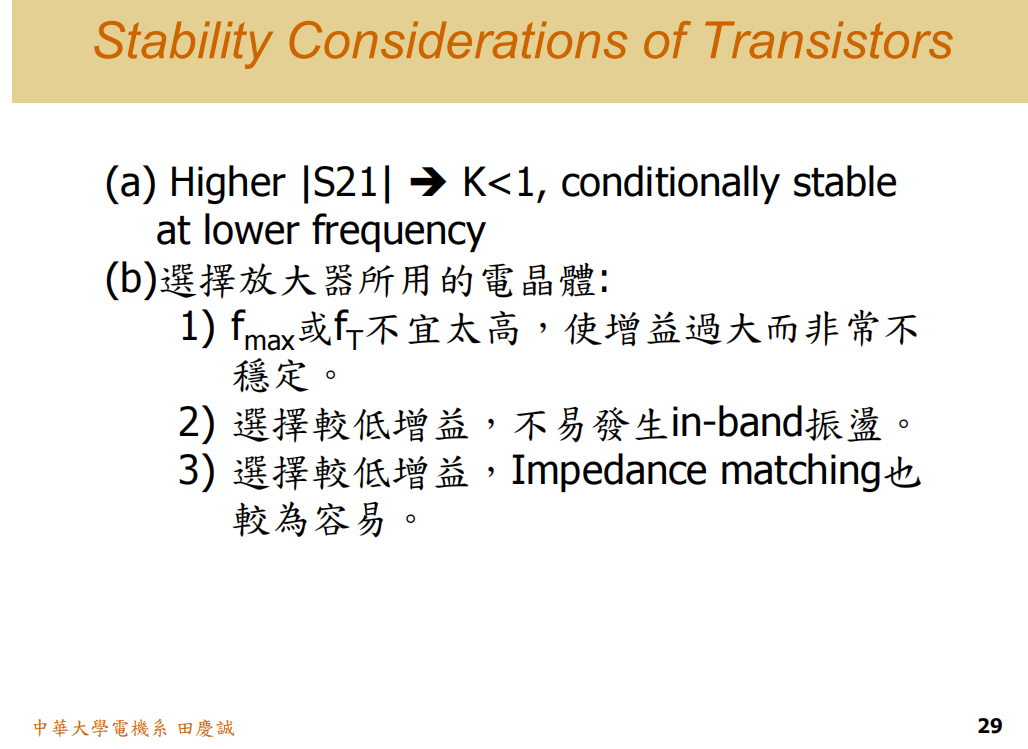
低频高增益与稳定性矛盾 :在低频时,晶体管的增益很高,但 K 因子很小,这意味着它处于潜在不稳定状态 。增益高不一定是好事,它很容易让放大器变成振荡器。所以,一般单级放大器的增益最好不要超过 15 dB,否则稳定性会非常差。
-
如何选择晶体管?
- 你的放大器的 fmaxfₘₐₓfmax 不是越高越好。比如,你要做一个 2.4 GHz、增益 10 dB 的放大器。根据固定的下降斜率,你选择的晶体管 fₘₐₓ 在 10 GHz 左右是比较合适的。
- 如果你选了一个 fmaxfₘₐₓfmax 高达 40 GHz 的"极品"晶体管,那么它在 2.4 GHz 的增益会非常高(可能超过 20 dB)。这会导致电路极其不稳定 ,很容易在低频和高频都产生振荡,而且想让电路稳定下来会非常困难。同时,这也是浪费成本。
最终设计验收标准
当完成整个放大器的设计(包括前后级匹配)后,我必须要求你们提供一张图:整个放大器级的 K 因子和增益随频率变化的曲线。(注意,这不是单个晶体管的,而是整个放大器的)
我对这张图的要求是:
-
K 因子:
- 在整个频带内,K 值要略大于 1(通常会将K值设计在1.05至1.1之间,例如 1.1) 。为什么?
- 从 MAG 公式可知,当 K=1 时,增益最大(MAG=MSG),但处于临界稳定,很危险。
- K 值太大(比如做到 2),说明你用了太多电阻去稳定,增益损失会非常严重。
- 经计算,K=1.05时,最大可用增益比MSG低约1.37dB。
K=1.1时,约低1.97dB(近似2dB)。因此,业界规定来说"MSG - 2dB "并保证K>1是一个常见且稳健的设计目标。这确保了电路有足够的稳定裕量来应对元件偏差和环境变化,是实现可量产、高可靠性设计的关键。
- K 值曲线必须是 "一去不回头" 地保持在 >1 的水平。如果曲线在某个低频点变得平坦甚至下降,就意味着存在低频不稳定的风险,这是我们必须避免的。
- 物理原因:在极低频段(例如接近1MHz),寄生效应基本消失,S21S_{21}S21很高而S12S_{12}S12极低,器件接近理想的单向性元件,因此通常是绝对稳定的。
- 在整个频带内,K 值要略大于 1(通常会将K值设计在1.05至1.1之间,例如 1.1) 。为什么?
-
增益曲线:
- 在你需要的通带内,增益要尽量平坦。
- 在通带外,增益必须被坚决地压制下去 。这样做有两个好处:
- 提高稳定性:消除带外振荡的可能。
- 降低噪声:防止带外的噪声和干扰信号被放大,从而影响整体性能。
一个合格的最终设计,其增益和 K 因子曲线应该符合上述形态。
1.9 工程实践
【实践警告】:1.测量仪器的正确使用
很多同学在做高功率放大器测量时,一上来就把电路接上网络分析仪,这是非常危险的!
之前我们用的一个放大器模块,一接上网络分析仪,屏幕上的曲线就变得"毛毛躁躁"。这其实是放大器已经自激振荡 了,振荡信号串进了分析仪。再这样下去,很可能烧毁价值不菲的网络分析仪!
正确步骤 :
-
不要先接网络分析仪! 先接上频谱分析仪。
-
将放大器的输入端接 50 欧姆负载,输出端接频谱分析仪(其输入阻抗也是 50 欧姆)。
-
上电后,用频谱仪从低频到高频仔细扫描,检查有没有异常的尖峰(振荡信号) 。
-
用手轻触电路,如果尖峰的频率随之变化,那基本可以确定是电路自激。
-
必须先解决振荡问题,才能连接网络分析仪进行测量!
【实践警告】:2.关于并联晶体管以增加功率
有人问:把两个晶体管并联,输出功率能增加一倍吗?
- 功率:是的,理论上输出功率可以翻倍。
- 增益 :那增益也会翻倍吗?不会 。增益是输出/输入的比值,并联并不会改变这个比值。实际上,增益反而会下降。
为什么?
- 阻抗变化 :晶体管并联后,输入和输出阻抗会急剧下降(根据并联公式),可能变得非常低。这导致匹配变得极其困难,且稳定性(K因子)会变得非常差,S11S₁₁S11 和 S22S₂₂S22 甚至可能大于1。
- 稳定代价 :为了让这样一个不稳定的系统稳定工作,你必须加入电阻来消耗掉多余的能量。这个过程会吃掉很多增益。所以,最终你实际得到的增益,可能比只用单个晶体管时还要低。
因此,并联晶体管以获取高功率是需要付出代价的,并不是并得越多越好。
第二部分:系统性的稳定技术
一些教材会介绍一种方法:在目标频率(如2.4GHz)的史密斯圆图上,分别画出源和负载端的稳定圆,然后选择落在稳定区域内的ΓSΓ_SΓS和ΓLΓ_LΓL值。
原则:选择的工作点应远离稳定圆的边界,以防因元件公差、PCB工艺偏差或外部接口阻抗变化(实际电路前后级很少是完美的50欧姆)导致工作点漂移到不稳定区,引发振荡。
但这种方法在业界通常不被接受,它存在重大风险,只要不稳定区在圆图上存在,就始终存在因不可控因素落入其中的风险 。产品量产后的批量退货风险是企业无法承担的。
并且该方法只保证了单一设计频率的稳定性。但在其他频点(尤其是低频),电路可能完全处于不稳定区,而我们必须确保晶体管在所有频点的K因子都大于1。
因此,业界的标准做法是:必须保证晶体管在所有频率下都是无条件稳定的(K > 1) 。一个良好的稳定性设计,其稳定圆应呈现如下趋势:在目标频段(如2.4GHz),稳定圆紧挨着史密斯圆图的边界(此时K≈1,增益最大)。随着频率降低,稳定圆应迅速向外移动,远离史密斯圆图 。这意味着在低频段,稳定区域非常大,电路非常稳固。
我们的设计目标就是通过稳定性网络,将这些在低频段"侵入"史密斯圆图的不稳定区全部"踢出去"。
2.1 串联电阻
我们可以在晶体管的输入端 或输出端串联一个电阻来实现稳定。

- 关键原则 :只选择一端(输入或输出)串联,切勿两端都加。
- 原因:当你在输入端串联电阻并将输入稳定圆 "推" 出史密斯圆图外时,输出稳定圆也会自动被推出去。反之亦然。因此,只需处理一端即可。
如何选择串联位置?这是一个重要的设计权衡:
- 对低噪声放大器的建议 :电阻应加在输出端。因为在输入端串联电阻会直接恶化整个系统的噪声系数,这对于追求低噪声的设计是不可接受的。
- 对功率放大器的建议 :电阻应加在输入端。因为在输出端串联电阻会消耗宝贵的输出功率,导致效率降低。为了稳定而牺牲一点增益是可以接受的,但绝不能牺牲输出功率。
串联电阻的实现原理(以输入端为例):
- 目标:将输入稳定圆推出史密斯圆图。
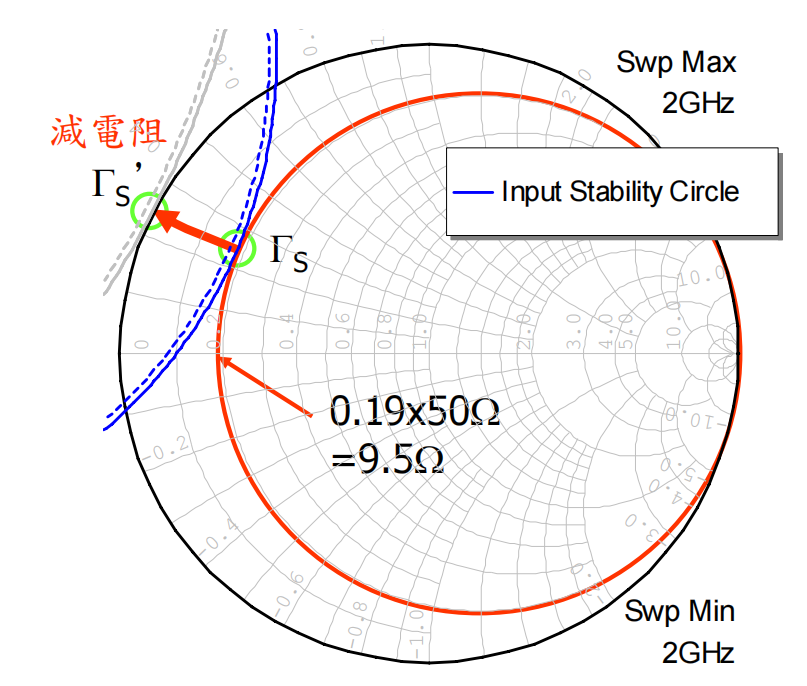
- 操作 :我们将"晶体管"视为"晶体管+串联电阻"这个新组合。这个新组合的输入反射系数(ΓS′Γ_S'ΓS′)与原始晶体管的输入反射系数(ΓSΓ_SΓS)之间存在一个明确的转换关系。
- 核心转换 :从ΓSΓ_SΓS到 ΓS′Γ_S'ΓS′ 的变换,在阻抗图上相当于减去一个电阻值 。这个变换沿着等电抗圆向史密斯圆图的左边缘(电阻为零处)移动。
- 计算电阻值 :
- 在史密斯圆图上,找到一个与原始输入稳定圆相切 的等电阻圆。
- 读出该等电阻圆的归一化电阻值(例如 0.19)。
- 计算实际电阻值(假设特征阻抗为50Ω):R = 0.19 × 50Ω = 9.5Ω。
- 这个 9.5Ω 就是从 Γ_S 点变换到史密斯圆图边缘(零电阻点)所需减去的电阻值。因此,需要串联的稳定电阻就是 9.5Ω 。
注意事项:
- 这种方法并非万能。在某些情况下,稳定圆可能包围了整个史密斯圆图中心。此时,通过串联电阻"减阻"的路径可能无法有效将整个不稳定区推出,这种方法就会失效。设计师需要根据稳定圆的形状判断,如果串联无效,则需尝试其它方法。
我们同样可以在输出端串联电阻来实现稳定,其原理与输入端串联完全对称。
操作:在史密斯圆图上找到与输出稳定圆相切的等电阻圆。读出对应的归一化电阻值,例如,读出的归一化电阻值为 0.56,则所需串联的电阻为 R = 0.56 × 50Ω = 28Ω。
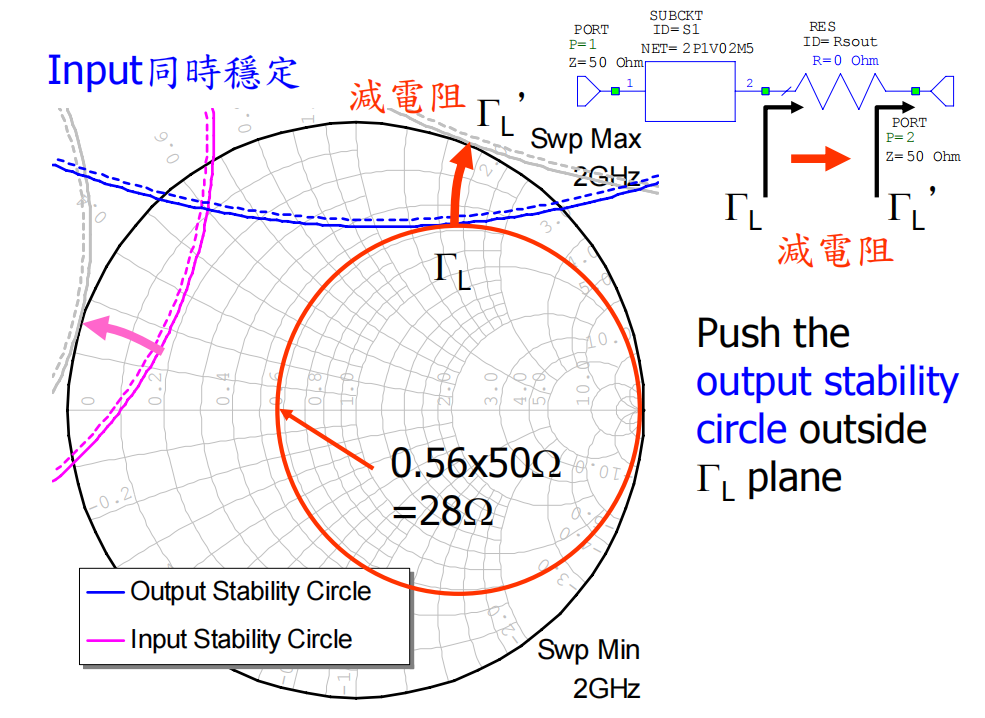
为何选择切点:
这个相切点代表了将整个不稳定区推出圆图所需的最大电阻值。只要这个点被推出,稳定圆上的其他所有点(所需电阻更小)都必然会被推到更外面的稳定区。通过软件仿真可以直观地验证这一点。
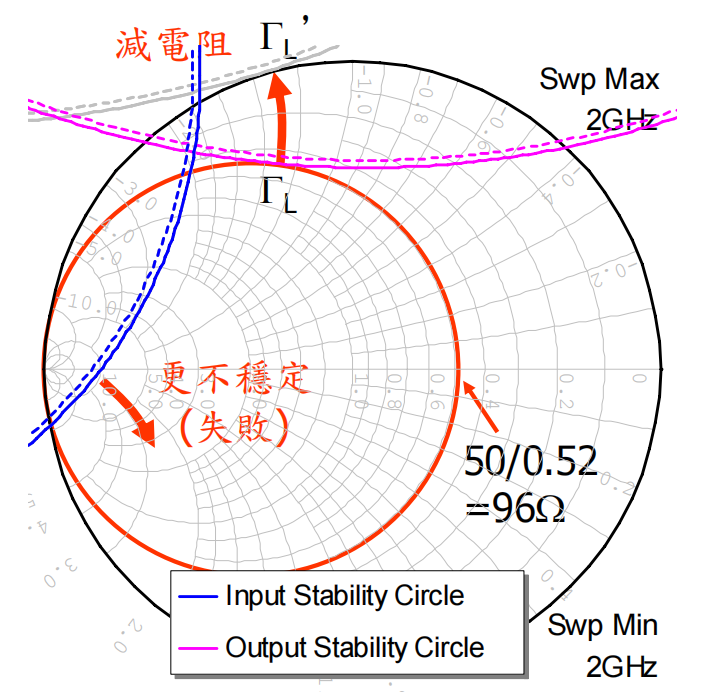
2.2 并联电阻
除了串联,也可以使用并联到地的电阻来实现稳定。同样,这个电阻可以加在输入端或输出端,只需选择一端即可。
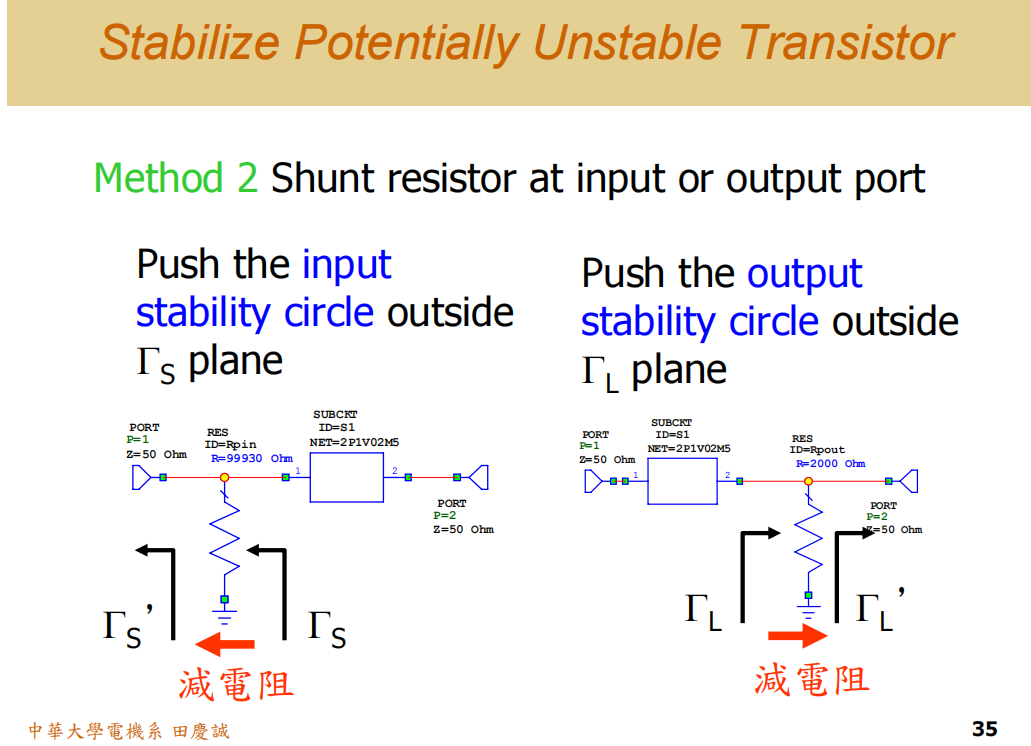
操作方法和串联电阻几乎完全一样,不过将寻找相切的归一化电阻圆,变为寻找归一化电导圆 。该等电导圆对应的归一化电导值,即为需要"减去"的电导。
2.3 加入负反馈
这是另一种非常常见且有效的方法,主要包括两种类型:
- 串连反馈 :如在源极(FET)或发射极(BJT)串联一个电阻或电感。这被称为源极/发射极退化反馈。
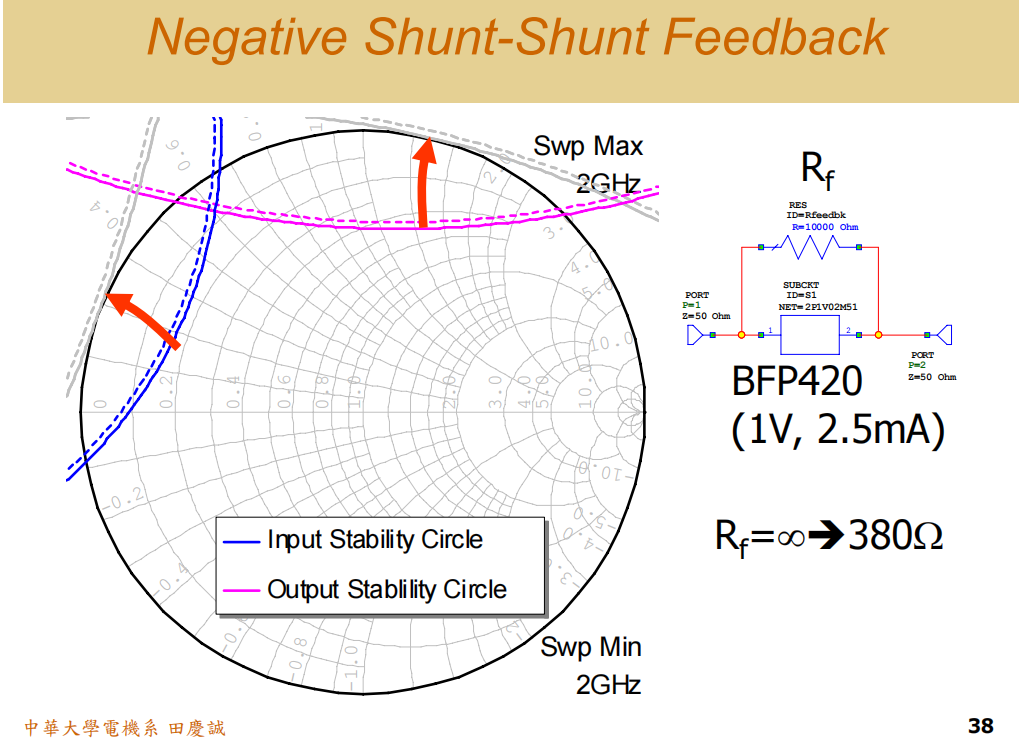
- 并联反馈:在晶体管的输出和输入之间并联一个电阻-电容网络。
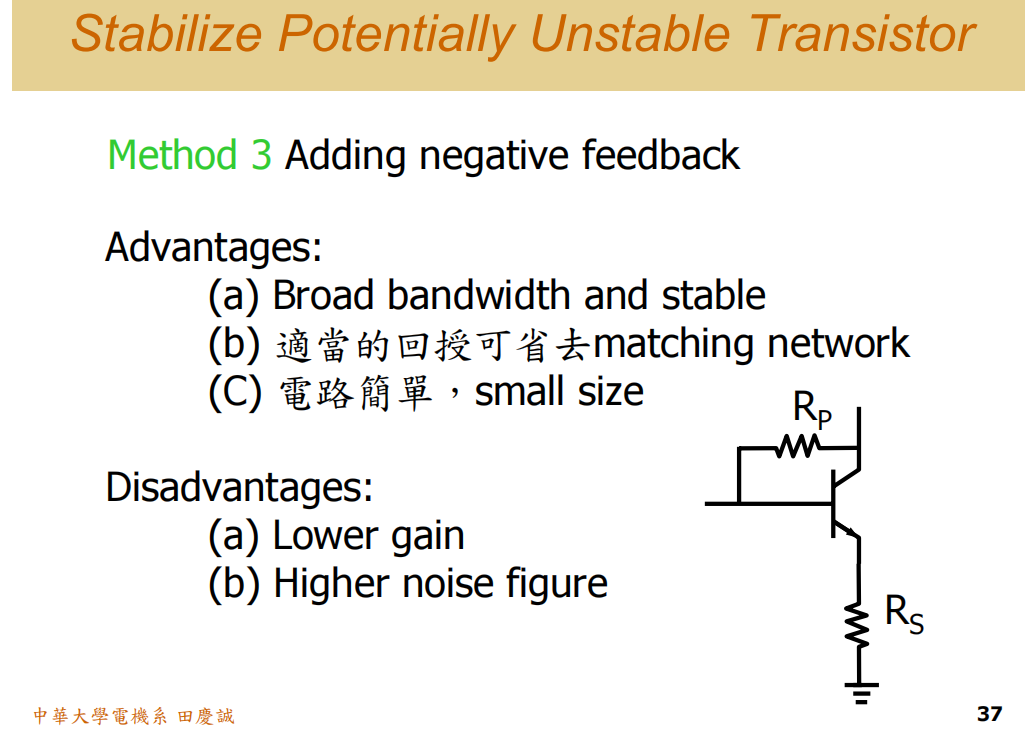
负反馈不仅能提升稳定性,还能方便地控制增益,相关公式在教材中已有详细推导。与串联电阻不同,反馈电阻的取值通常需要通过仿真试错来确定,观察稳定圆的变化趋势。
负反馈的优势:
- 卓越的宽带稳定性:负反馈能非常有效地抑制低频不稳定性,效果通常优于串联电阻。
- 简化阻抗匹配 :引入负反馈会改变晶体管的输入输出阻抗。通过恰当选择反馈电阻,可以使其输入输出阻抗接近50欧姆,从而省去外部匹配电路,极大简化设计并节省芯片面积。市面上许多宽带放大器(如覆盖1-6GHz的产品)都采用此方法以实现小型化。
但凡事皆有代价,负反馈的主要缺点是:
- 增益下降:这是负反馈的基本特性。
- 噪声性能恶化:反馈电阻本身会引入额外噪声,并可能影响电路的噪声匹配。因此,追求超宽带性能往往意味着需要牺牲增益和噪声系数。
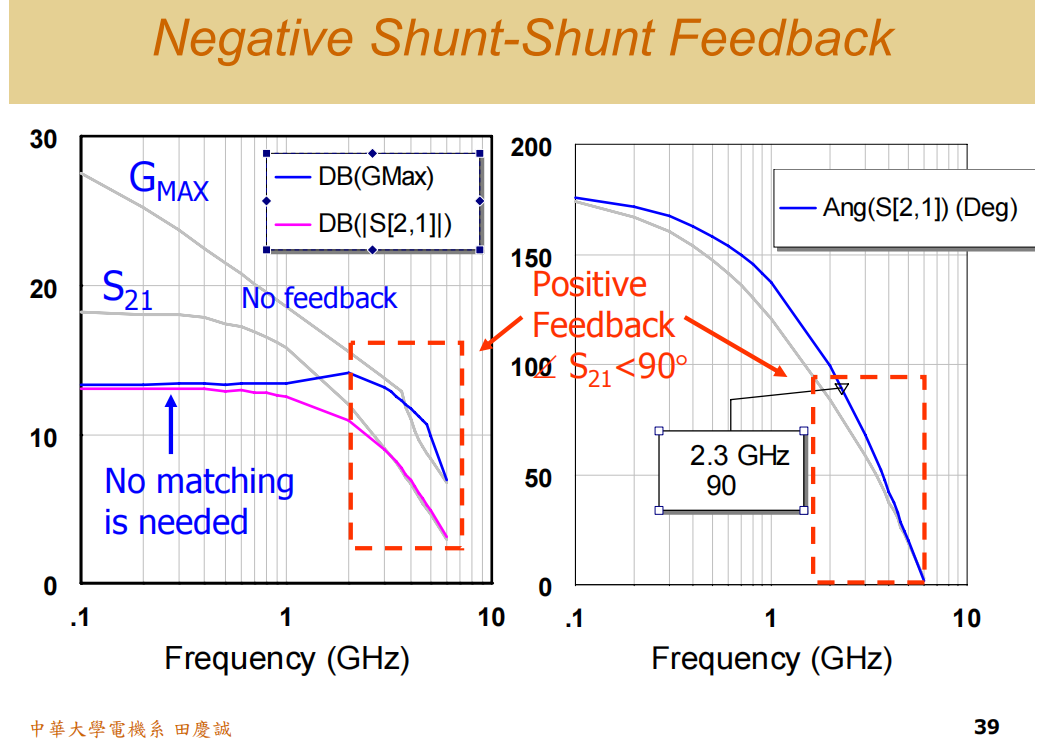
在实际仿真中,引入负反馈后,电路的增益曲线可能会在高频段出现异常凸起 。这通常是一个危险信号,表明在该频段反馈可能从负反馈转变为正反馈 ,从而引发电路振荡。
为什么会出现正反馈?在高频下,晶体管本身的相移会发生变化。当相移累积到一定程度时,反馈信号的相位可能从反相变为同相,负反馈就变成了正反馈。因此,设计时必须仔细检查全频段的稳定性,确保K因子在所有频率下都大于1。
总而言之,负反馈是一种强大的工具,它能用简单的结构实现宽带稳定和简化的匹配。然而,设计师必须清醒地认识到其代价:增益的损失和噪声性能的下降。这种"增益换带宽"、"性能换通用性"的权衡,在追求超宽带性能时尤为明显。因此,负反馈非常适合用于对噪声要求不严、但需要覆盖多频段的多标准系统,而在追求极限噪声或增益性能的低噪声放大器、功率放大器中则需慎用。
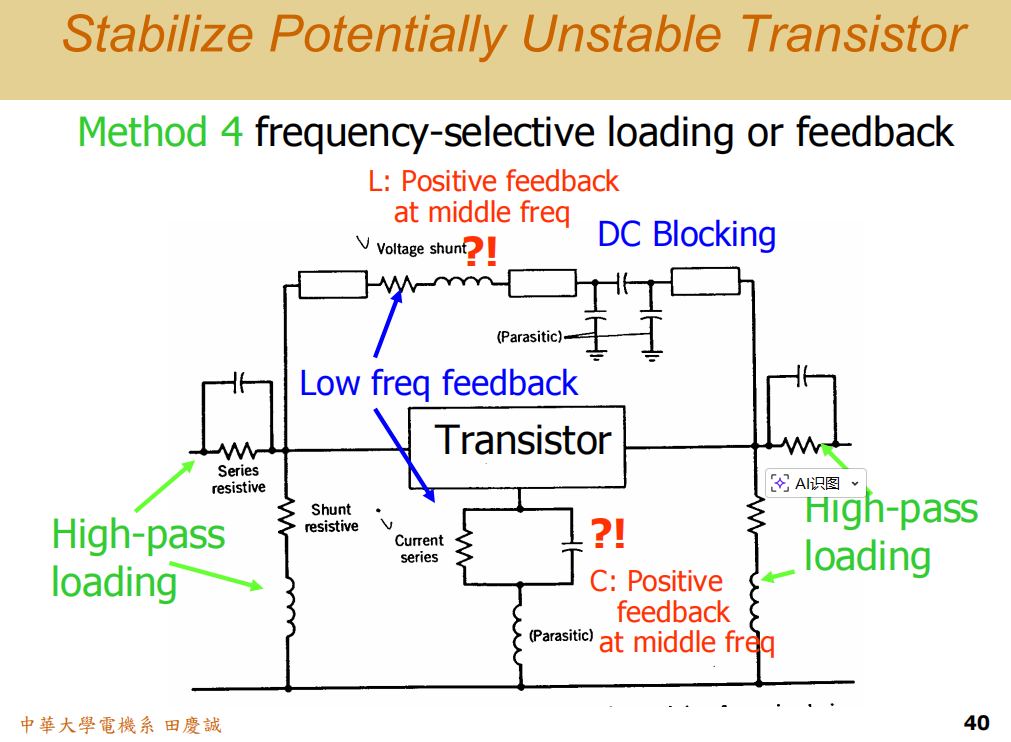
2.4 频率选择性负载/反馈网络
我们之前介绍了三种基本的稳定方法:串联电阻、并联电阻和负反馈。它们都属于宽带稳定方法 ,即电阻在所有频率上都起作用。但这会带来一个问题:为了稳定低频,我们可能需要一个较大的电阻,但这个电阻在高频也会消耗大量增益,这显然不是我们想要的。
理想的解决方案是:让晶体管在高频时"看不见"这个稳定电阻 。这样高频增益得以保留,同时低频稳定性又能得到保障。实现这一目标的关键就是使用高通(High-Pass)结构 的电路。
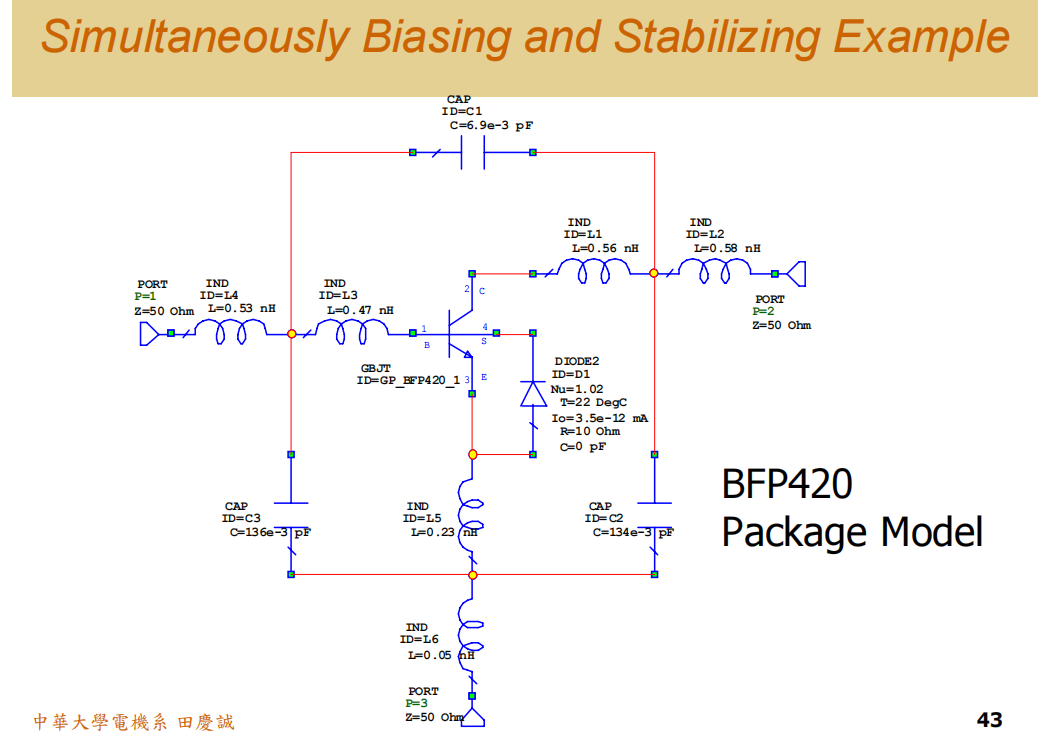
让我们看一个典型电路:一个射频晶体管,其集电极通过一个射频扼流圈(RF Choke)接到偏置电压Vc。这个电路巧妙地同时实现了偏置和稳定:
- 低频路径:在低频段,扼流圈的感抗很小,相当于短路。因此,输出信号会"看到"并流经偏置电阻到地,从而被衰减,保证了低频稳定性。
- 高频路径 :在工作频段(如2.4GHz),扼流圈的感抗很大,相当于开路。因此,高频信号被阻隔,无法流向偏置电阻,从而几乎无损耗地输出,保证了高频增益。
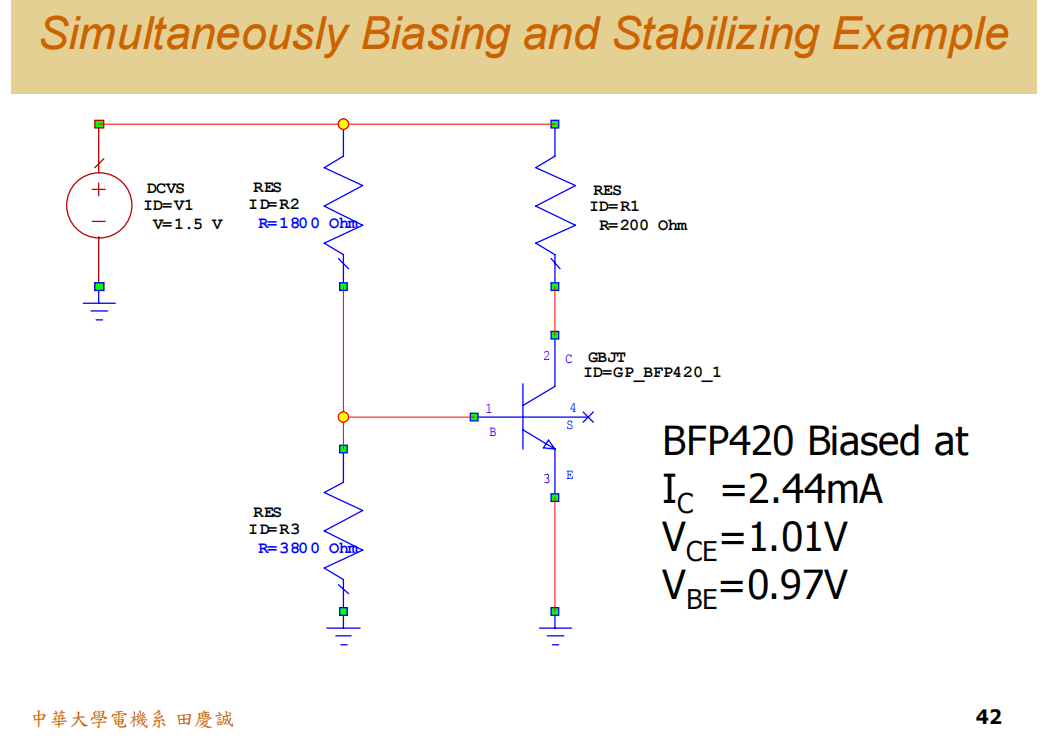
我们可以通过仿真来验证这一设计。以一个具体模型(如BFP420)为例,我们同时设计直流偏置点和稳定网络。
简单封装:
引入稳定网络:
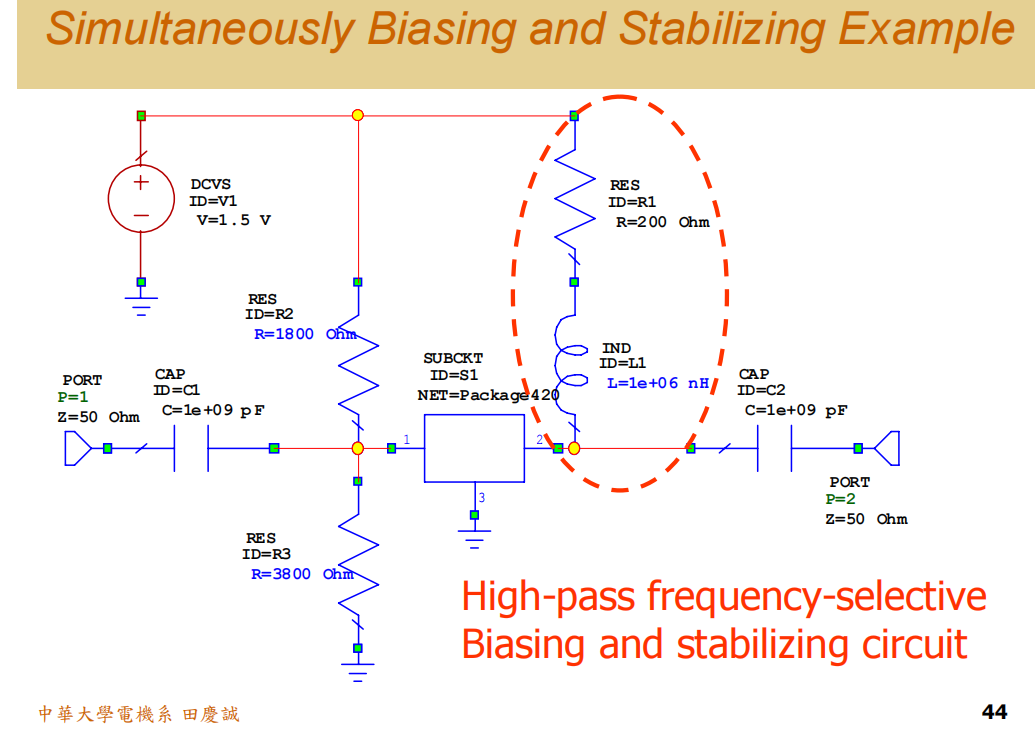
- 偏置设计 :根据目标工作点(如VceVceVce=1.01V, IcIcIc=2.44mA)计算基极分压电阻。通常,流过分压电路的电流取集电极电流的1/10,这是一个常见的折中方案,既能稳定偏置点,又不会消耗过多静态功率。
- 稳定性优化 :关键在于调整扼流圈的电感值。
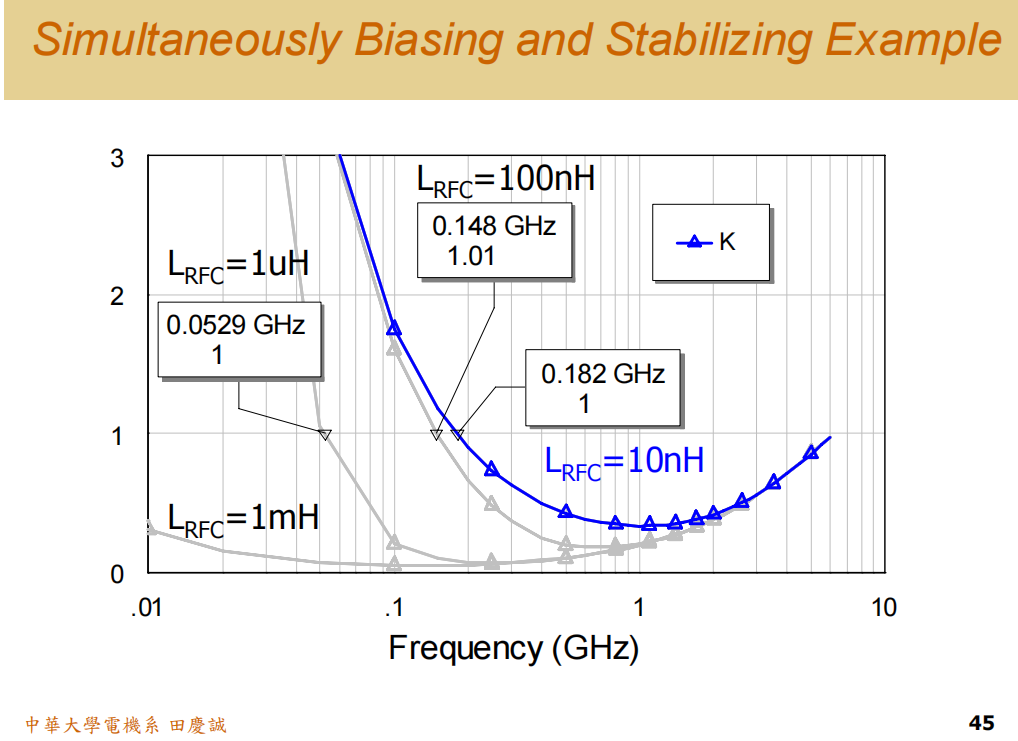
- 当电感值非常大时,连低频信号也无法通过,稳定电阻无法发挥作用,电路在全频段都可能不稳定(K因子 < 1)。
- 逐渐减小电感值 ,我们会发现低频段的K因子开始提升。电感值和稳定电阻共同构成了一个RL高通网络,其截止频率决定了从哪个频点开始电路变得稳定。我们可以通过调整电感值,精确控制电路在所需频率(如150MHz以下)实现稳定。
- 但是,电感值减小到一定程度后(例如10nH),对中高频段的稳定性提升会达到极限。这是因为在更高频率,扼流圈的感抗已经足够大,稳定电阻不再起作用。此时,如果该频段仍不稳定,就需要考虑其他方法,例如减小偏置电阻的阻值 (这可以通过调整偏置电压VcVcVc来实现),或者额外增加一个针对该频段的并联RC稳定网络 。
核心要点总结
- 电感值的选择 :电感的大小没有绝对标准,它决定了稳定电路起作用的频率下限。对于工作频率(如2.4GHz),一个10nH的电感感抗很大,是良好的扼流圈;但对于低频(如240MHz),其感抗很小,稳定电阻得以接入。
- 稳定性的物理本质 :让电路稳定的物理本质,是通过电阻消耗掉多余的增益。如果并联的电阻阻值过大(如400欧姆),分流作用就弱,消耗的增益少,稳定效果就差。因此,有时需要将电阻减小到合适的值(如80欧姆)才能有效提升K因子。
结论
将偏置电路与频率选择性稳定网络相结合,是射频设计中一个非常高效且常用的技巧。工程师需要理解其工作原理,并通过仿真反复调整元件参数(主要是电感值和电阻值),用最少的元件同时实现稳定的直流工作点、良好的高频性能以及可靠的全频带稳定性。