随着具身智能技术的快速演进,人形机器人作为物理世界与数字世界的交互载体,其应用价值日益凸显,而实时精准遥操是解锁人形机器人多元场景应用的关键前提。实时遥操技术能够让人类操作者的动作精准传递给机器人,使机器人灵活适配复杂未知环境,在工业巡检、抢险救灾、医疗辅助、特种作业等高危或高精度场景中发挥不可替代的作用,推动人形机器人从实验室走向实际应用,加速具身智能产业化落地进程。
01 27节点高精度全域捕捉
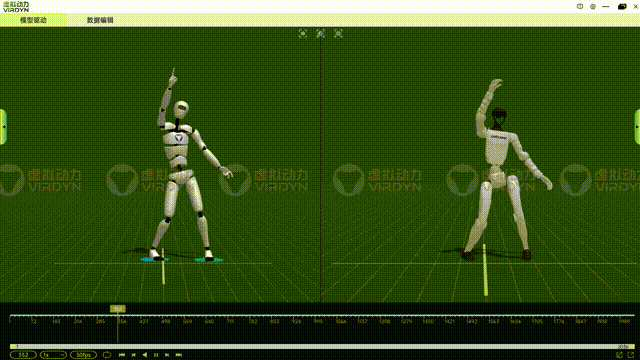
设备整合全身27个高精度惯性传感器节点,实现手部、手指、腿部、腰背部、头部等关键骨骼节点的全覆盖。通过高精度传感器的协同工作,可精准捕捉操作者各部位的细微运动轨迹与三维姿态数据,同时具备低延时数据传输能力,确保动作数据实时同步输出,为机器人精准复刻人类动作奠定基础。
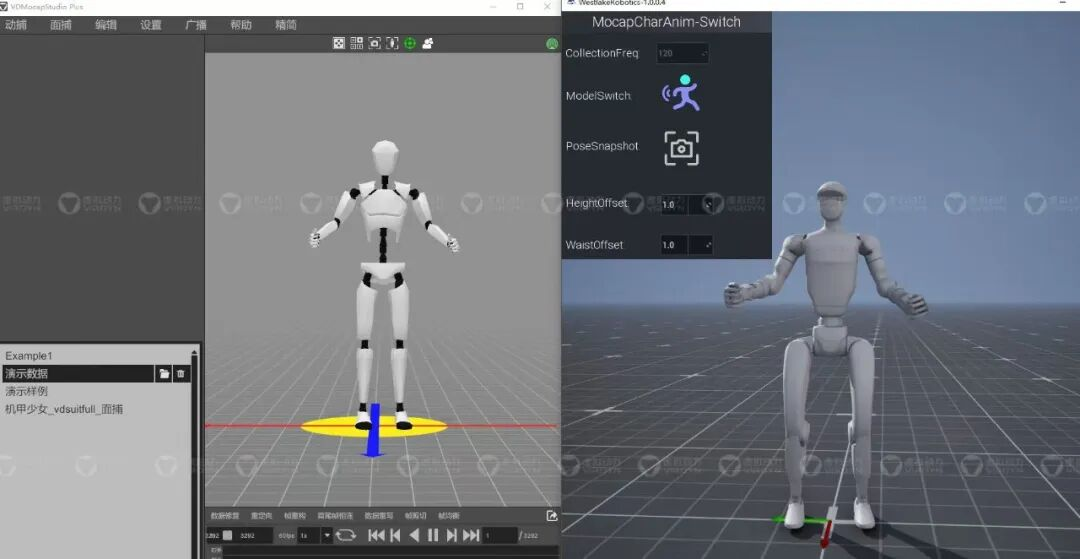
02 实时数据兼容与动作重定向
操作者穿戴设备后,其动作数据可通过实时广播协议直接重定向至动作预训练大模型的机器人模型上。当机器人模型能够精准跟随真人运动时,即完成大模型运动适配;随后通过ROS机器人操作系统接收动作数据,即可实现真人动作与机器人全身动作的低延迟同步遥操。
03 多格式数据记录与学习赋能
配套动捕引擎具备强大的数据记录与导出功能,支持MD/BVH/FBX等多种主流格式数据导出。其中,MD格式文件可直接导入机器人动作数据转化系统进行重定向映射,转化后的数据可直接用于机器人模仿学习训练,也可作为强化学习的优化初始策略部署,助力机器人快速积累动作经验,提升自主适应能力。
作为在动捕领域深耕多年的技术型企业,整合VDsuit-Full高精度动捕设备、专业机器人数据转化软件及全流程实时遥操方案,已成功为多家企业提供了定制化的数据与遥操服务。实践中充分验证了动捕设备在机器人实时遥操中的可靠性性,且证实了"真人动捕数据采集-数据重定向映射-真机迁移"训练路径的科学性与高效性,为推动人形机器人规模化应用提供了成熟的技术范式。