一、参考资料
科普:为什么标称1英寸的CMOS/CCD成像芯片,其对角线长度不是25.4mm? - 知乎
二、相关概念
物理焦距 vs. 等效焦距
- 物理焦距:镜头的光学中心到成像平面的实际距离,又称为光学焦距。
- 等效焦距:将不同尺寸传感器上的视角,统一换算到传统35mm全画幅(36mm×24mm,对角线约43.3mm)标准下所对应的焦距(物理焦距计算物理FOV,等效焦距计算等效FOV)。
1/k英寸
1/k是光学规范 (Optical Format,OF),传感器对角线的长度表示传感器尺寸,单位为英寸。
16mm规范
1英寸=16mm
18mm规范
1英寸=18mm
不是所有的CMOS芯片都是按照 1英寸=16mm 来计算长度的,这要看CMOS对角线长度来定:只有CMOS对角线长度≥8mm时,才会使用16mm规范,此时**1英寸=16mm。比如1/2 的芯片,对应对角线真实尺寸大约是8mm。对于对角线长度小于8mm的CMOS,使用18mm规范,此时1英寸=18mm,**比如1/2.55英寸的芯片,其对角线的真实尺寸大约是7mm。
三、计算DFOV
1. FOV概念
Field of View(FOV),即视场角。在不同的应用场景中,FOV有着不同的定义和计算方式。
在光学和成像领域,FOV指的是相机镜头能够捕捉到的场景范围。它通常以角度来表示,分为垂直视场角 (Vertical Field of View)、水平视场角 (Horizontal Field of View)和对角视场角 (Diagonal Field of View)。这些视场角的大小决定了光学仪器的视野范围,焦距越长,视野范围越远;焦距越短,视野范围越近。
在摄像头参数中,FOV也被称为视场角,它与相机传感器的尺寸 和焦距 有关。对于给定的传感器尺寸,焦距越短,FOV越大;焦距越长,FOV越小。这意味着,如果传感器尺寸固定,改变焦距可以改变FOV。在实际应用中,不同的镜头(如广角镜头、标准镜头和长焦镜头)提供不同的FOV。广角镜头 提供较大的FOV,适合捕捉较宽广的场景,而长焦镜头提供较小的FOV,适合捕捉远处的细节。
2. DFOV 计算公式
D F O V = 2 × arctan ( d 2 f ) \mathrm{DFOV}=2\times\arctan\left(\frac{d}{2f}\right) DFOV=2×arctan(2fd)
其中:
d是传感器对角线尺寸(单位:mm),f是镜头有效焦距(单位:mm),- arctan \arctan arctan 是反正切函数,计算结果以度数为单位。
3. 计算DFOV (已知等效焦距)
相机参数
技术参数_DJI Mavic 3 行业系列_DJI大疆行业应用
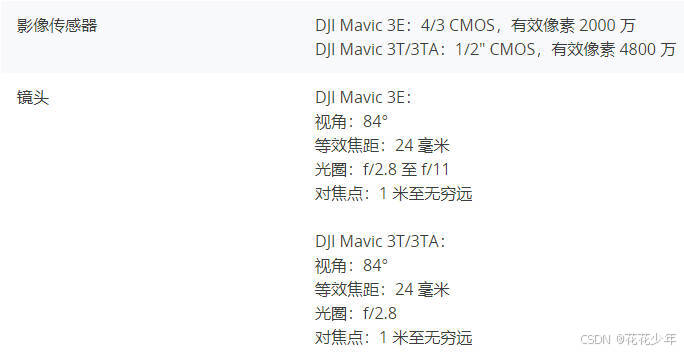
这两款镜头的等效焦距和视角是预先设定的光学设计结果 ,而不是通过对方参数计算出来的。它们的设计目标是使两款不同用途的无人机(3E侧重测绘,3T侧重热成像与可见光融合)拥有完全相同的可见光镜头视野(DFOV为84°,等效焦距为24mm),以方便作业规划和数据一致性。
验证已知参数
DFOV计算公式:
D F O V = 2 × arctan ( d 2 f ) \mathrm{DFOV}=2\times\arctan\left(\frac{d}{2f}\right) DFOV=2×arctan(2fd)
A. 对于 Mavic 3E
-
传感器:4/3英寸 CMOS。
- 4/3英寸系统的传感器标准尺寸为 17.3mm × 13mm。
- 对角线长度
d_M3E = √(17.3² + 13²) ≈ 21.64mm。
-
等效焦距 :
f_equiv = 24mm(已知)。 -
计算等效FOV:
bashDFOV = 2 * arctan( 43.3 / (2 * 24) ) DFOV ≈ 2 * arctan(0.9021) DFOV ≈ 2 * 42.0° ≈ 84.0°计算结果与给出的 84° 完全吻合。
-
计算物理焦距
等效焦距 = 物理焦距 × 转换系数。
转换系数(裁切因子)= 全画幅对角线 / 实际传感器对角线 = 43.3 / 21.64 ≈ 2.0。
因此,物理焦距
f_phy_M3E= 等效焦距 / 转换系数 = 24mm / 2.0 ≈ 12mm。这意味着 Mavic 3E 镜头的实际光学焦距约为12mm。
B. 对于 Mavic 3T/3TA
-
传感器:1/2英寸 CMOS。
- 1/2英寸传感器的常见尺寸为 6.4mm × 4.8mm。
- 对角线长度
d_M3T = √(6.4² + 4.8²) = 8.0mm。
-
等效焦距 :
f_equiv = 24mm(已知)。 -
计算等效FOV:
bashDFOV = 2 * arctan( 43.3 / (2 * 24) ) DFOV ≈ 2 * arctan(0.9021) DFOV ≈ 2 * 42.0° ≈ 84.0°计算结果同样与给出的84°完全吻合。 这证明了虽然传感器小了很多,但通过镜头设计,它提供了与3E完全一样的视野。
-
计算物理焦距
转换系数 = 43.3 / 8.0 ≈ 5.41。
因此,物理焦距
f_phy_M3T= 24mm / 5.41 ≈ 4.44mm。这意味着 Mavic 3T 镜头的实际光学焦距非常短,约为4.44mm。
总结
| 项目 | DJI Mavic 3E | DJI Mavic 3T/3TA | 说明 |
|---|---|---|---|
| 传感器尺寸 | 4/3英寸 (17.3×13mm) | 1/2英寸 (约6.4×4.8mm) | 3E的传感器面积约为3T的 5.7倍。 |
| 传感器对角线 | 约 21.64 mm | 约 8.0 mm | |
| 像素 | 2000万 | 4800万 | 3T通过更高像素和小尺寸实现高分辨率。 |
| 设计等效焦距 | 24 mm | 24 mm | 设计目标一致,保证视角相同。 |
| 设计视角 | 84° | 84° | 验证计算与标称值一致。 |
| 推算物理焦距 | 约 12 mm | 约 4.44 mm | 为实现相同的等效焦距和视角,传感器越小,所需物理焦距越短。 |
| 光圈 (物理) | f/2.8 - f/11 | f/2.8 | 物理光圈值决定了通光量。3E更大的物理光圈(12mm/2.8≈Φ4.29mm)比3T(4.44mm/2.8≈Φ1.59mm)通光孔径大得多,这是其画质更优的物理基础。 |
总结:
- 计算过程 :实际上是用等效焦距(24mm) 和全画幅对角线(43.3mm) ,通过DFOV公式反推得到了**84°**的视角。这个计算对于两款机型都成立,验证了参数的自洽性。
- 设计逻辑 :大疆为了保持作业一致性,将两款用途不同的机型主摄视角设计为完全相同。Mavic 3E 使用大底传感器配合约12mm镜头,实现高画质;Mavic 3T 使用小底高像素传感器配合约4.44mm超广角镜头,实现高分辨率。两者在"视野"这一关键参数上达成统一。
- 本质区别 :虽然视野一样,但由于物理焦距和传感器尺寸的巨大差异,Mavic 3E 在单个像素感光能力、信噪比、动态范围上通常具有先天优势,更适合严谨的测绘建模;而 Mavic 3T 的优势在于超高像素带来的细节分辨率,以及集成了热成像传感器。
4. 验证DFOV
Field of view(FOV)相关介绍(全网最全)+全景图像(Panorama Image)-CSDN博客
bash
影像传感器
1/1.56 CMOS
有效像素 50MP
广角镜头
DFOV=85.98°
像素大小 1μm(1微米)步骤1: 计算传感器对角线尺寸 d
对于"1/k英寸"格式,传感器对角线 d ≈ 16 k m m d\approx\frac{16}{k}\mathrm{mm} d≈k16mm。
其中 k = 1.56 k=1.56 k=1.56,所以:
d = 16 1.56 ≈ 10.2564 m m d=\frac{16}{1.56}\approx10.2564\mathrm{mm} d=1.5616≈10.2564mm
使用像素信息验证传感器尺寸(可选):
- 由于像素大小(1 μm = 0.001 mm)和分辨率(50M,假设为50兆像素 = 50,000,000像素)。
- 通过总像素数和像素大小计算传感器面积
A:
A = 总像素数 × ( 像素大小 ) 2 = 50 , 000 , 000 × ( 0.001 m m ) 2 = 50 , 000 , 000 × 0.000001 = 50 , 000 , 000 × 0.000001 = 50 m m 2 A=\text{总像素数}\times(\text{像素大小})^2=50,000,000\times(0.001\mathrm{mm})^2=50,000,000\times0.000001=50,000,000\times0.000001=50\mathrm{mm}^2 A=总像素数×(像素大小)2=50,000,000×(0.001mm)2=50,000,000×0.000001=50,000,000×0.000001=50mm2
传感器是矩形,常见宽高比(Aspect Ratio)有4:3、3:2或16:9,通过宽高比来计算对角线尺寸 d。假设标准广角传感器宽高比为 4:3:
- 设宽度 W = 4 k W=4k W=4k,高度 H = 3 k H=3k H=3k,则面积 A = W × H = 12 k 2 = 50 m m 2 A=W\times H=12k^{2}=50\mathrm{mm}^{2} A=W×H=12k2=50mm2。
- 解得 k 2 = 50 12 ≈ 4.1667 k^2=\frac{50}{12}\approx4.1667 k2=1250≈4.1667,所以 k ≈ 2.04 k\approx2.04 k≈2.04。
- 对角线 d = W 2 + H 2 = ( 4 k ) 2 + ( 3 k ) 2 = 5 k ≈ 5 × 2.041 = 10.205 m m d=\sqrt{W^{2}+H^{2}}=\sqrt{(4k)^{2}+(3k)^{2}}=5k\approx5\times2.041=10.205\mathrm{mm} d=W2+H2 =(4k)2+(3k)2 =5k≈5×2.041=10.205mm。
步骤2: 确定焦距 f f f
焦距 f f f 没有在规格中提供。DFOV 的计算必须知道 f f f,但这里DFOV已给出为85.98°,因此我们可以反推焦距以验证计算逻辑:
-
从DFOV公式解出 f f f:
f = d 2 × tan ( D F O V 2 ) f=\frac{d}{2\times\tan\left(\frac{\mathrm{DFOV}}{2}\right)} f=2×tan(2DFOV)d -
代入已知值:
-
DFOV = 85.98°,所以 D F O V 2 = 42.99 ° \frac{\mathrm{DFOV}}{2}=42.99° 2DFOV=42.99°。
-
计算 tan ( 42.99 ° ) \tan(42.99°) tan(42.99°):
tan ( 42.99 ° ) ≈ 0.9322 \tan(42.99°)\approx0.9322 tan(42.99°)≈0.9322 (使用计算器或近似计算:基于 tan ( 43 ° ) ≈ 0.9325 \tan(43°)\approx0.9325 tan(43°)≈0.9325,调整微小角度差)。
-
代入:
f = 10.2564 2 × 0.9322 = 10.2564 1.8644 ≈ 5.501 m m f=\frac{10.2564}{2\times0.9322}=\frac{10.2564}{1.8644}\approx5.501\mathrm{mm} f=2×0.932210.2564=1.864410.2564≈5.501mm
-
-
因此,反推的焦距 f ≈ 5.50 m m f\approx5.50\mathrm{mm} f≈5.50mm。这符合广角镜头的典型焦距(例如,5-6mm)。
步骤3: 计算DFOV(完整过程)
如果焦距已知(例如,从设计规格中 f = 5.50 m m f=5.50\mathrm{mm} f=5.50mm),DFOV的计算如下:
-
输入参数:
- d = 10.2564 m m d=10.2564\mathrm{mm} d=10.2564mm(传感器对角线),
- f = 5.50 m m f=5.50\mathrm{mm} f=5.50mm(焦距,假设值)。
-
计算中间值:
d 2 f = 10.2564 2 × 5.50 = 10.2564 11 ≈ 0.9324 \frac{d}{2f}=\frac{10.2564}{2\times5.50}=\frac{10.2564}{11}\approx0.9324 2fd=2×5.5010.2564=1110.2564≈0.9324 -
计算半角:
半角 = arctan ( 0.9324 ) ≈ 43.00 ∘ ( 因为 tan ( 43.00 ∘ ) ≈ 0.9325 ) \text{半角}=\arctan(0.9324)\approx43.00^\circ\quad(\text{因为}\tan(43.00^\circ)\approx0.9325) 半角=arctan(0.9324)≈43.00∘(因为tan(43.00∘)≈0.9325) -
计算DFOV:
D F O V = 2 × 43.00 ∘ = 86.00 ∘ \mathrm{DFOV}=2\times43.00^\circ=86.00^\circ DFOV=2×43.00∘=86.00∘
这与给出的85.98°非常接近(差异约0.02°,可能由于四舍五入或精确的 f 值)。如果使用更精确的 f = 5.501 m m f=5.501\mathrm{mm} f=5.501mm 和 d = 10.2564 m m d=10.2564\mathrm{mm} d=10.2564mm:
d 2 f = 10.2564 2 × 5.501 ≈ 0.9320 , arctan ( 0.9320 ) ≈ 42.99 ∘ , D F O V = 2 × 42.99 ∘ = 85.98 ∘ \frac{d}{2f}=\frac{10.2564}{2\times5.501}\approx0.9320,\quad\arctan(0.9320)\approx42.99^\circ,\quad\mathrm{DFOV}=2\times42.99^\circ=85.98^\circ 2fd=2×5.50110.2564≈0.9320,arctan(0.9320)≈42.99∘,DFOV=2×42.99∘=85.98∘
结果完全一致。
总结
- DFOV的计算过程 :基于公式 D F O V = 2 × arctan ( d 2 f ) \mathrm{DFOV}=2\times\arctan\left({\frac{d}{2f}}\right) DFOV=2×arctan(2fd) ,其中:
- 传感器对角线 d = 10.2564 m m d=10.2564\mathrm{mm} d=10.2564mm,
- 焦距 f ≈ 5.501 m m f\approx5.501\mathrm{mm} f≈5.501mm(反推自给定的DFOV=85.98°)。
- 为什么需要焦距:DFOV 的计算必须同时知道传感器尺寸和焦距。
- 像素大小的作用:像素大小(1 μm)和分辨率(50 MP)用于验证传感器尺寸,但不直接用于DFOV公式。它们帮助计算传感器面积和宽高比,但这里不影响核心DFOV计算。
- 注意事项:如果焦距有微小变化(例如,f=5.50mm vs 5.501mm),DFOV会略有差异。85.98° 是一个精确值,表明设计时使用了优化的 f 和 d。