1. 中断的基本概念
• 中断 - 是单片机应对 突发事件 的一种方式。如图:
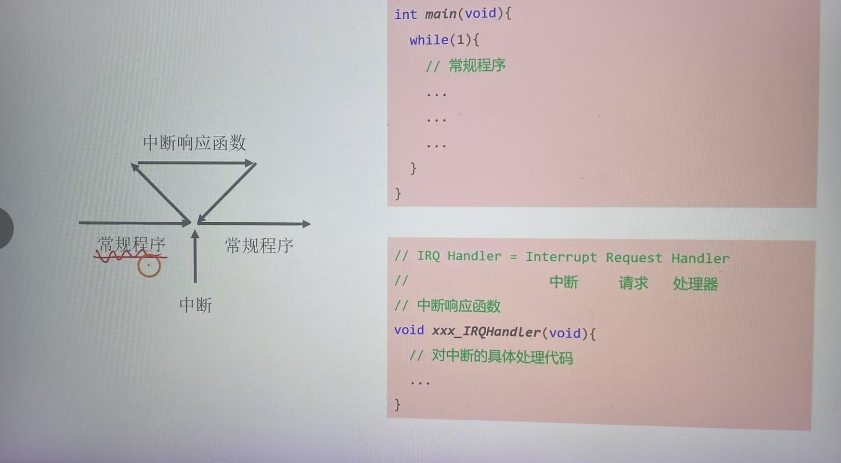
• 常规程序在遇到突发事件(中断)的时候,就会打断当前正在执行的程序,转而去执行相应的中断响应程序,直到执行完之后,再回到常规程序被打断的位置(中断点),继续执行常规程序。
2. 中断编程的举例,为什么要有中断?
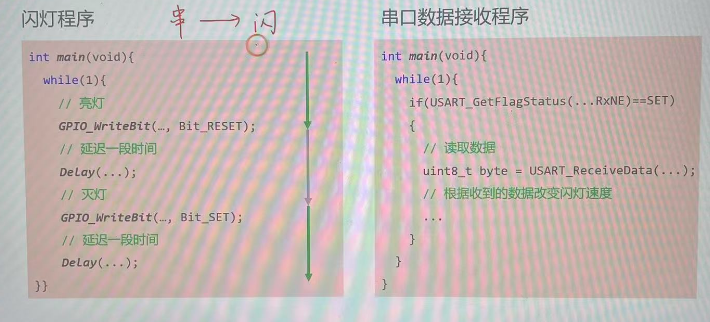
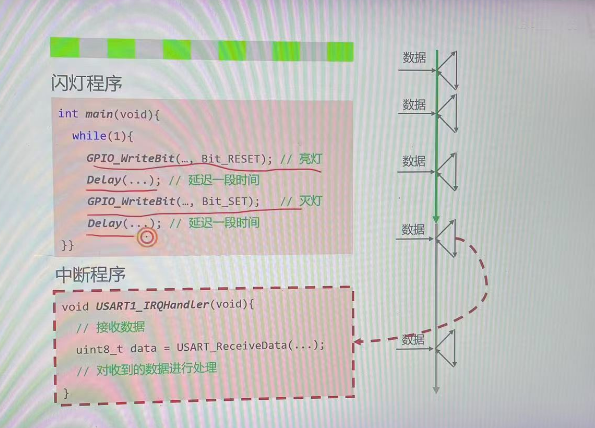
• 假设有一个闪灯的程序和一个接收串口接收数据的程序,如图:
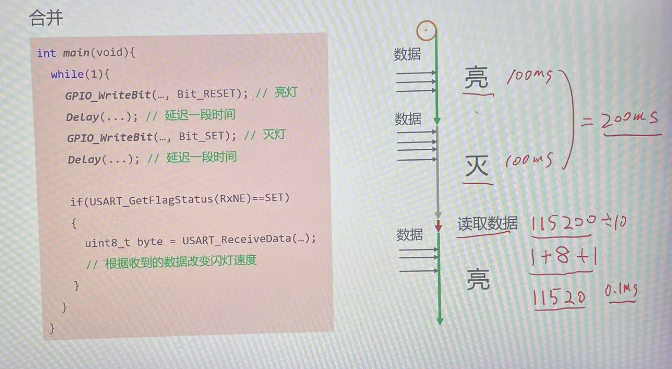
• 然后我们把这两个程序合并在main函数中,如图:
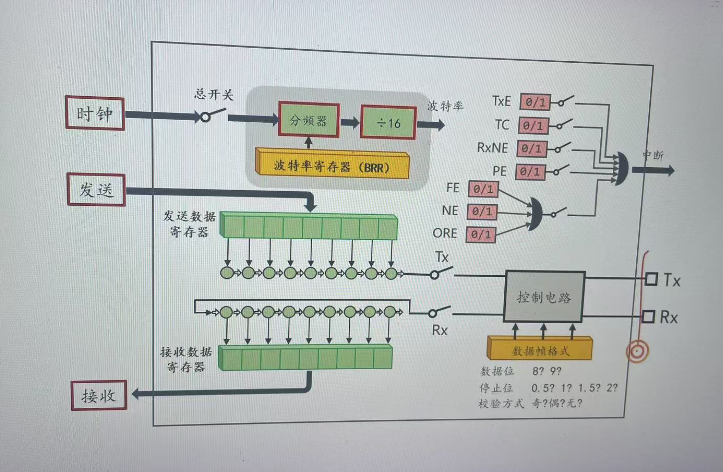
• 根据串口的框图
• 得出,在while中的程序的执行 是 从上而下执行的,而闪灯操作执行假设需要200ms,假如串口的波特率是设置为115200,1位起始位,8位数据位,1位停止位,得出每秒可以传输11520个字节,也就是说一个字节传输大概要0.1ms,也就是说这个程序的弊端 就是 来不及接收串口的数据,下一个数据就会覆盖上一个数据。
• 如何解决?
• 使用的是中断,在串口中有许多标志位,而这些标志(例如RXNE)是可以设置为可以中断产生的。
• 如果有数据来 就会 打断当前的闪灯程序,去执行相应的中断服务程序去 接收数据。
• 
3. 中断的优先级
3.1 中断优先级的概念
• 中断优先级 - 用数字 表示 中断的紧急程度
• 如图,一个是中断排队和一个是中断嵌套。
• 就算是先来的 也可能被抢占。
3.2 中断优先级的表示方法
• 如图,这是中断结构的框图
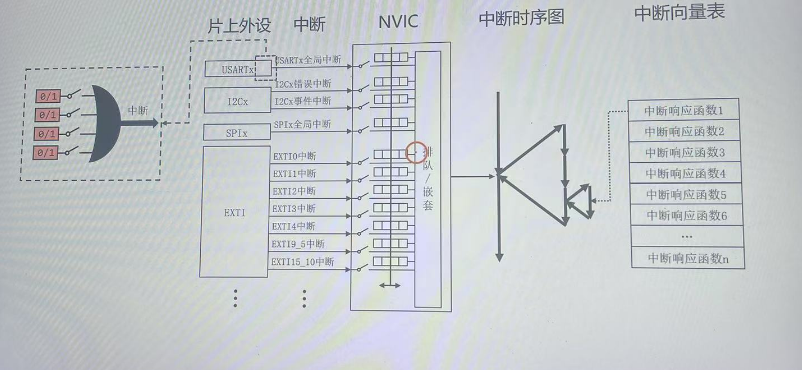
• 中断 基本 是由片上外设产生的,基本每个片上外设都会有一个中断。
• NVIC:是通过优先级来管理中断 的,根据优先级决定让cpu执行 那个中断,cpu在从中断向量表中找到对应的中断响应函数来执行。
3.2.1 放大NVIC,如图:
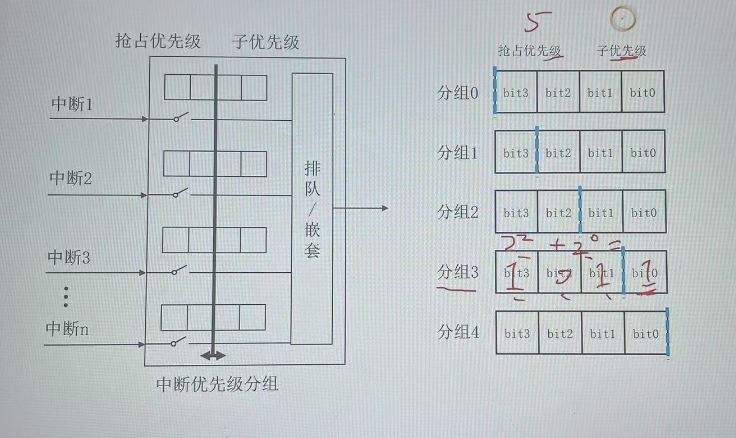
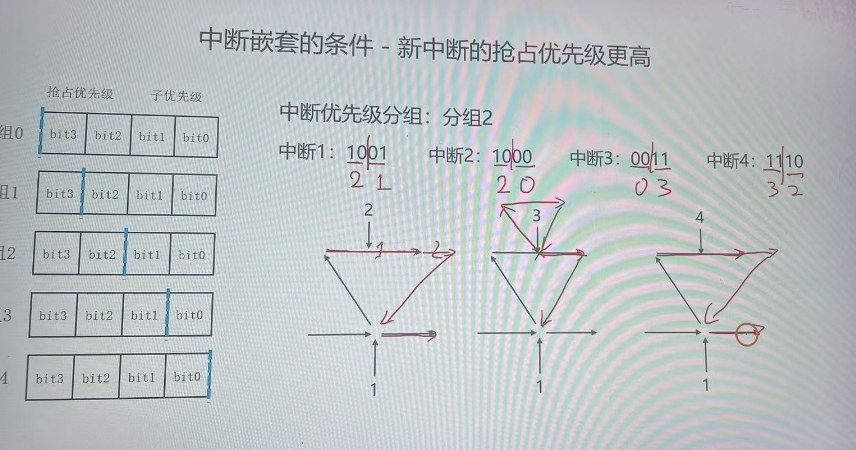
• 可知在NVIC里面,会对每个中断进行分组,抢占优先级是设置多少,子优先级是设置多少。注:值越低,优先级就越高。
• 中断可以设置这5个分组中的一个。常用是分组2。
3.3 抢占优先级与中断嵌套
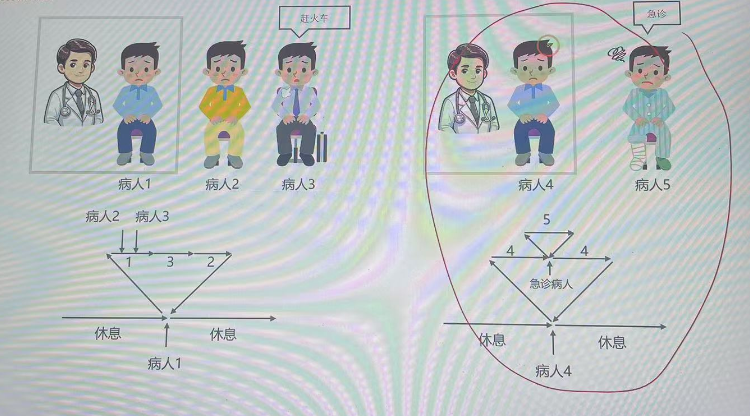
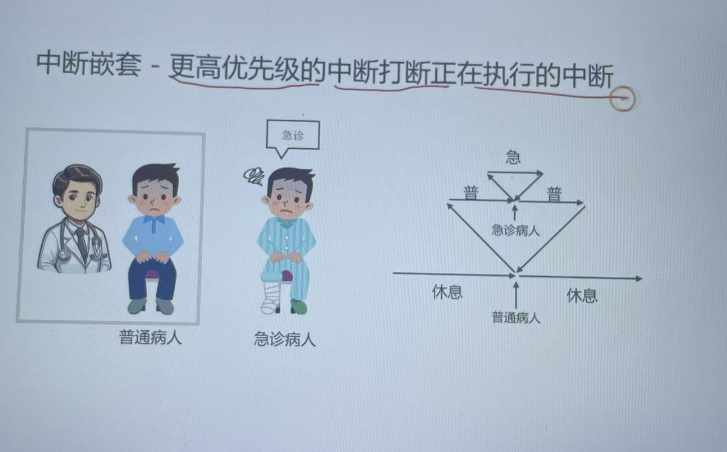
• 中断嵌套 - 更高优先级的中断 可以 打断正在执行的中断(优先级低的)。如图:
• 中断嵌套的条件 - 新的中断的抢占优先级 比 原来中断的抢占优先级更高。
• 例子,如图:
3.4 子占优先级与中断排队
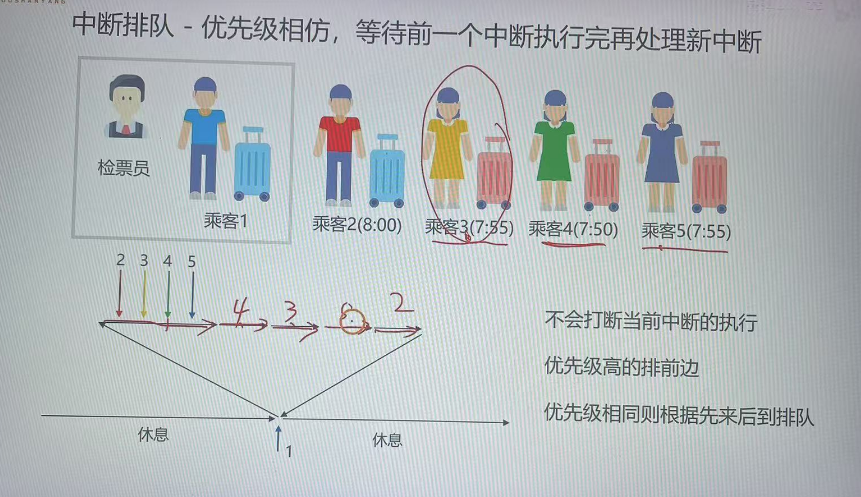
• 中断排队 - 优先级相仿(抢占优先级相仿),等待前一个中断执行完之后 才处理 新的中断。
• 例子,如图:
3.5 例子,如图:
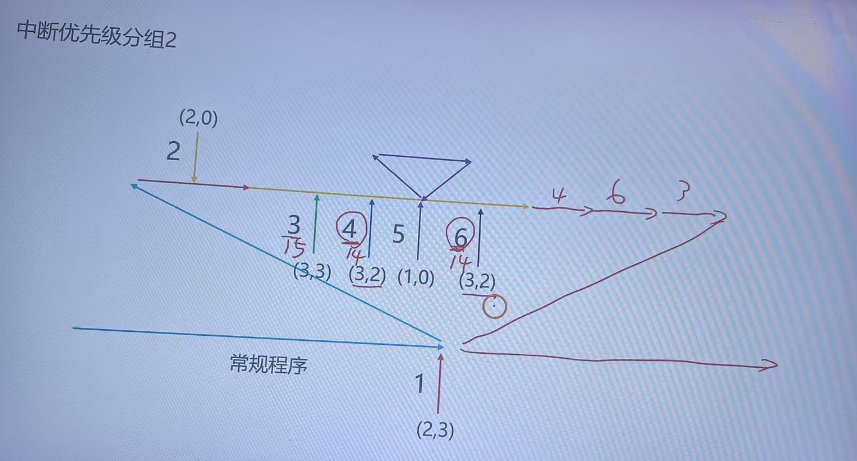
• 解析:
• 由于常规程序在执行的过程遇到了一个中断,所以这个中断会打断常规程序,转而去执行对应的中断响应函数,在执行函数的过程,又有一个中断触发,但是这个中断的抢占式优先级和当前的中断时一样的,所以新的中断不会抢占原来的中断,而是等待原来的中断执行完成后,再执行这个新的中断。但是再执行2中断的过程又触发4个中断,如上图,这四个新的中断只有5的抢占优先级比原来的2中断的抢占优先级高,所以当前的中断被5中断抢占,从而执行相应的中断响应函数。执行完之后,根据子优先级进行排队执行。
4. 实战
• 一些编程接口的介绍,如图:
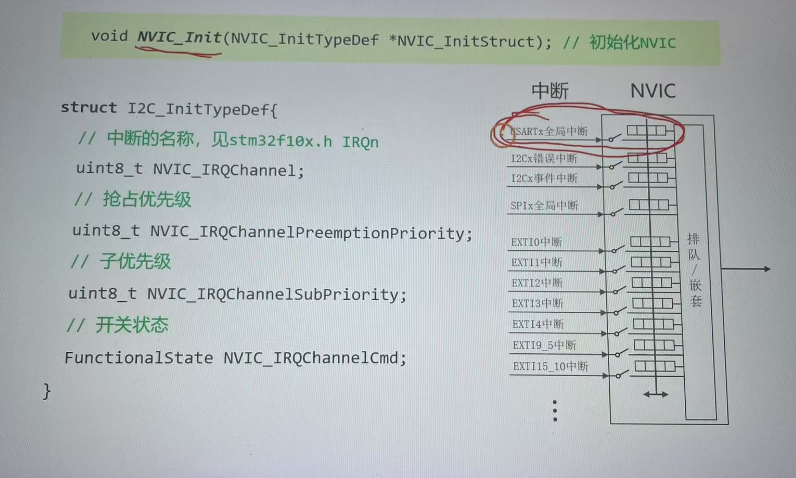
• 这是配置NVIC,NVIC是管理中断,可以设置中断的使能,分组还有分组中的优先级。
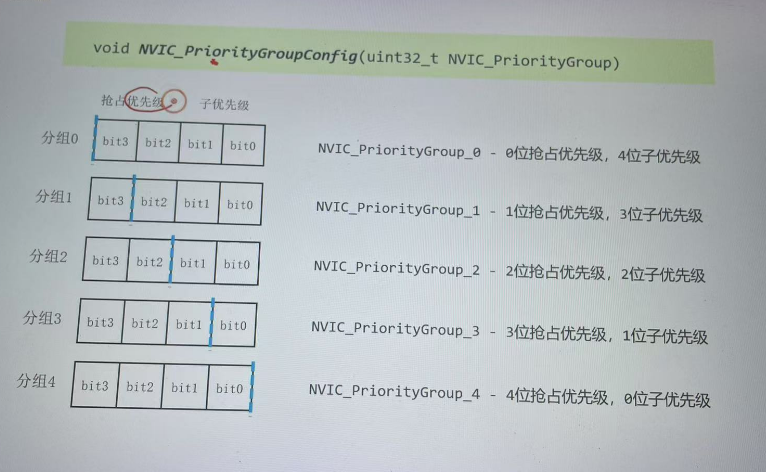
• 设置分组,一般放在main的开头。
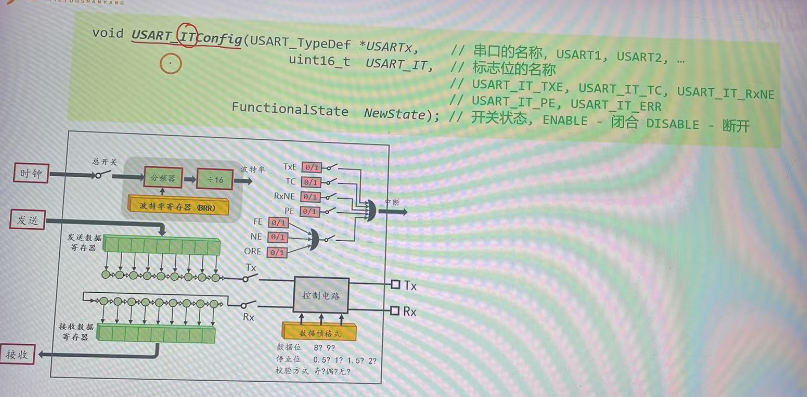
• 这是配置USART的中断,配置中断的触发的条件。
5. 代码
#include "stm32f10x.h"
#include "delay.h"
uint32_t blinkTime = 1000;
void LED_Init();
void My_USART_Init();
int main(void)
{
//设置中断分组
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);
LED_Init();
My_USART_Init();
while(1)
{
GPIO_WriteBit(GPIOC,GPIO_Pin_13,Bit_RESET);
Delay(blinkTime);
GPIO_WriteBit(GPIOC,GPIO_Pin_13,Bit_SET);
Delay(blinkTime);
}
}
void USART1_IRQHandler(){//中断响应函数
if(USART_GetFlagStatus(USART1,USART_FLAG_RXNE) == SET){//先判断是什么类型的中断
uint8_t byte = USART_ReceiveData(USART1);
if(byte == '0')
blinkTime = 1000;
else if(byte == '1')
blinkTime = 200;
else if(byte == '2')
blinkTime = 50;
USART_ClearFlag(USART1,USART_FLAG_RXNE);
}
}
void My_USART_Init(){
//1.初始化GPIO
GPIO_InitTypeDef gpio_initStruct = {0};
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE);
//tx PA9
//GPIO_InitTypeDef gpio_initStruct = {0};
gpio_initStruct.GPIO_Mode = GPIO_Mode_AF_PP;
gpio_initStruct.GPIO_Pin = GPIO_Pin_9;
gpio_initStruct.GPIO_Speed = GPIO_Speed_2MHz;
GPIO_Init(GPIOA,&gpio_initStruct);
//tx PA10
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE);
gpio_initStruct.GPIO_Mode = GPIO_Mode_IPU;
gpio_initStruct.GPIO_Pin = GPIO_Pin_10;
GPIO_Init(GPIOA,&gpio_initStruct);
//2.初始化USART
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1,ENABLE);
USART_InitTypeDef usart_initStruct = {0};
usart_initStruct.USART_BaudRate = 115200;
usart_initStruct.USART_Mode = USART_Mode_Rx | USART_Mode_Tx;
usart_initStruct.USART_Parity = USART_Parity_No;
usart_initStruct.USART_StopBits = USART_StopBits_1;
usart_initStruct.USART_WordLength = USART_WordLength_8b;
USART_Init(USART1,&usart_initStruct);
//4.使能USART
USART_Cmd(USART1,ENABLE);
//5.配置USART中断
USART_ITConfig(USART1,USART_IT_RXNE,ENABLE);
//6.初始化NVIC
NVIC_InitTypeDef nvic_initStruct = {0};
nvic_initStruct.NVIC_IRQChannel = USART1_IRQn;
nvic_initStruct.NVIC_IRQChannelCmd = ENABLE;
nvic_initStruct.NVIC_IRQChannelPreemptionPriority = 0;
nvic_initStruct.NVIC_IRQChannelSubPriority = 0;
NVIC_Init(&nvic_initStruct);
}
void LED_Init(){
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOC,ENABLE);
GPIO_InitTypeDef gpio_initStruct = {0};
gpio_initStruct.GPIO_Mode = GPIO_Mode_Out_OD;
gpio_initStruct.GPIO_Pin = GPIO_Pin_13;
gpio_initStruct.GPIO_Speed = GPIO_Speed_2MHz;
GPIO_Init(GPIOC,&gpio_initStruct);
}