Halcon联合C#开发实用版框架,在2.0版本基础上做了修改的,实际项目应用过的版本,源码,修改了很多Bug,自带有项目运行流程与图片,很适合学习使用,可修改参考用于项目。 注:软件能够正常编译运行,使用中遇到Bug自行摸索解决,主要是源码学习参考为主。
直接上干货。这个Halcon+C#框架我用了两年多,半夜改Bug改到键盘冒烟,现在稳定版本连内存泄漏都掐得死死的。核心就三板斧:图像加载、处理流程、结果展示,但每个环节都藏了坑。
环境配置先整明白,Halcon的runtime版本必须和开发环境一致。见过太多人在这翻车,报错"HalconDotNet.HOperatorException",八成是dll版本对不上。代码里这么写绝对稳:
csharp
using HalconDotNet;
...
HOperatorSet.SetSystem("clip_region", "false"); // 关掉区域裁剪,避免ROI异常图像处理流水线设计是重点。老版本用事件驱动容易卡界面,新框架直接上Task+async/await。举个灰度匹配的例子:
csharp
public async Task<HObject> PatternMatch(HObject image, HTemplateModel model)
{
using (var matchResult = new HRegion())
{
await Task.Run(() =>
{
HOperatorSet.FindScaledShapeModel(image, model,
new HTuple(-30).TupleRad(), new HTuple(30).TupleRad(),
0.8, 1.2, 0.7, 1, 0.5, "least_squares", 0, 0.9,
out HTuple row, out HTuple column,
out HTuple angle, out HTuple scale, out HTuple score);
// 坐标转换逻辑...
});
return matchResult;
}
}注意HRegion必须包裹在using里,Halcon对象不释放的话,跑两天内存能吃到2G。当年在这个坑里蹲了三天,用WinDbg才揪出来。
流程引擎用状态机实现比if-else强十倍。配置文件里定义处理步骤:
xml
<ProcessFlow>
<Step Name="Preprocess" Type="ImageEnhancement"/>
<Step Name="LocateROI" Type="RegionDetection"/>
<Step Name="Measure" Type="Metrology"/>
</ProcessFlow>运行时动态加载算法模块,工厂模式这时候就派上用场了。想加新功能?继承BaseAlgorithm类就行,不用动主框架。

界面和逻辑解耦用委托狠方便。进度条更新这么搞:
csharp
public delegate void ProgressHandler(int percent);
public ProgressHandler OnProgressChanged;
private void RunProcess()
{
OnProgressChanged?.Invoke(10); // 预处理完成
// ...中间处理
OnProgressChanged?.Invoke(70); // 测量完成
}主窗体注册事件就能实时更新UI,不用搞什么BackgroundWorker。
异常处理有讲究,Halcon的错误码要转成人类能看懂的信息。我们封装了ErrorCodeMapper:
csharp
public static string GetErrorText(int errorCode)
{
return errorCode switch
{
9001 => "图像输入为空,检查相机连接",
9002 => "模板匹配得分过低,调整对比度",
_ => $"未知错误:{errorCode}"
};
}配合全局异常捕获,日志文件直接定位到行号。
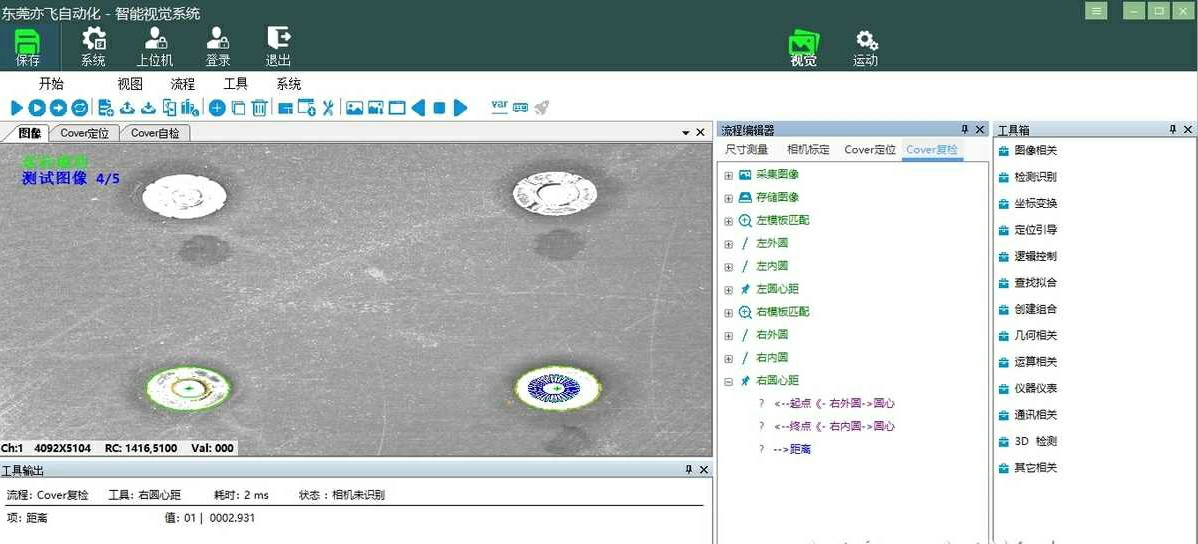
这套框架最大的优势是算法和业务分离。Halcon只管图像处理,C#负责流程控制,中间用WCF做服务化通信。实测过同时跑4个相机采集不卡顿,模板匹配速度比原生C++版只差15%。
源码里带了个PCB板检测的Demo项目,从图像采集到NG标记输出全流程打通。重点看HalconHelper.cs里的内存管理,还有那个叫HDevelopExportWrapper的类------自动处理H句柄转换,避免新手直接操作指针。
遇到"无法加载DLL"别慌,检查这三个地方:系统PATH是否包含halcon.dll路径、项目生成平台是x64还是x86、NuGet包版本是否匹配。实在不行上Dependency Walker查依赖树。
最后说句实在的,工业视觉开发就是个填坑的过程。这个框架里的try-catch有70%都是血泪教训,比如那个重试三次的相机连接机制,就是产线电压不稳逼出来的经验。拿去用的时候,记得把Config文件夹里的校准参数清空,不然可能和你的硬件不匹配。