Create > Robots > Franka Emika Panda Arm
Tools > Physics > Physics Inspector
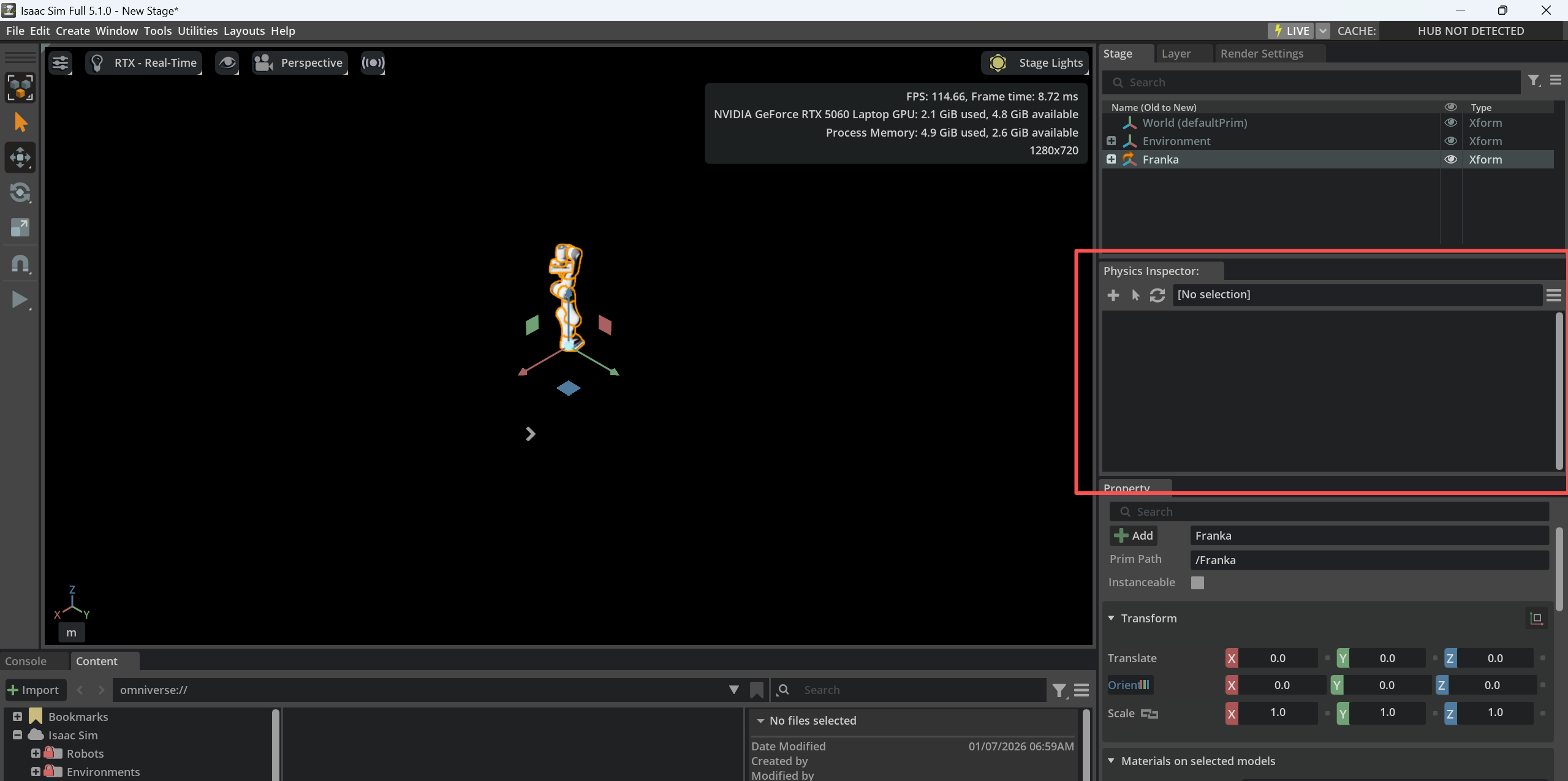
啥也没有
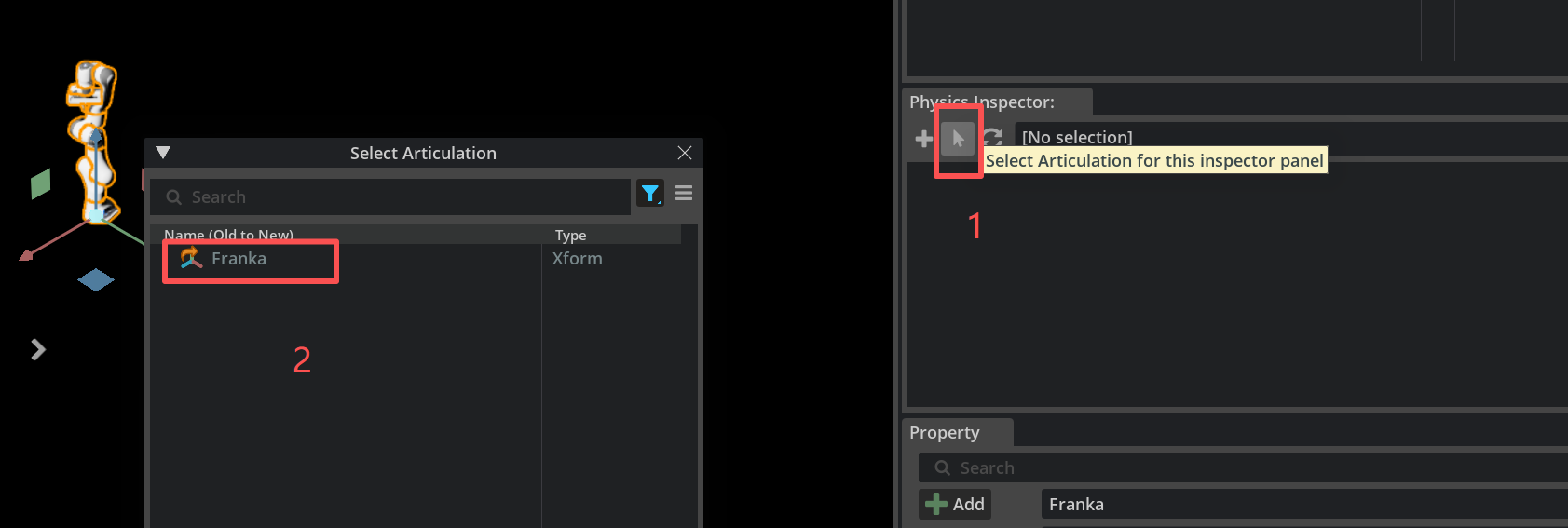
按这个点
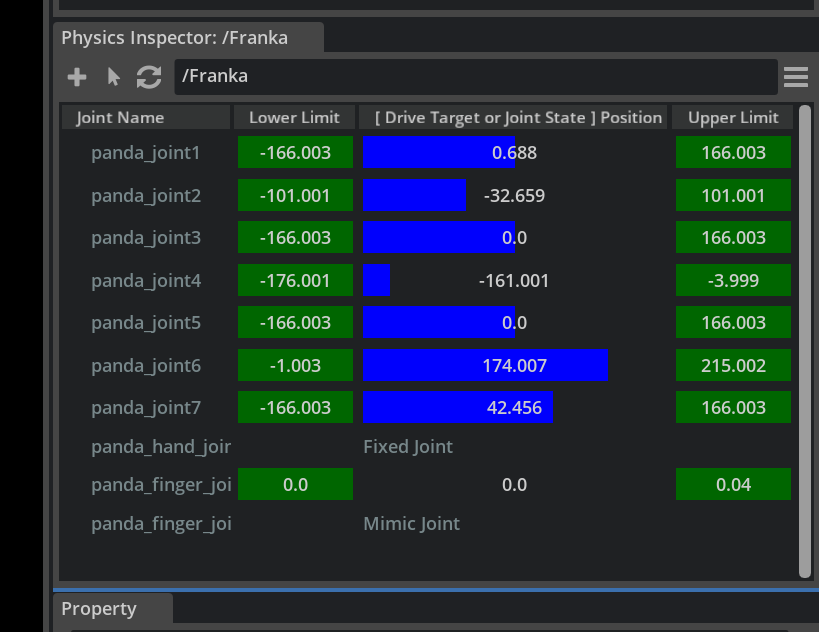
我去,这已经覆盖我一个周末的进度了。
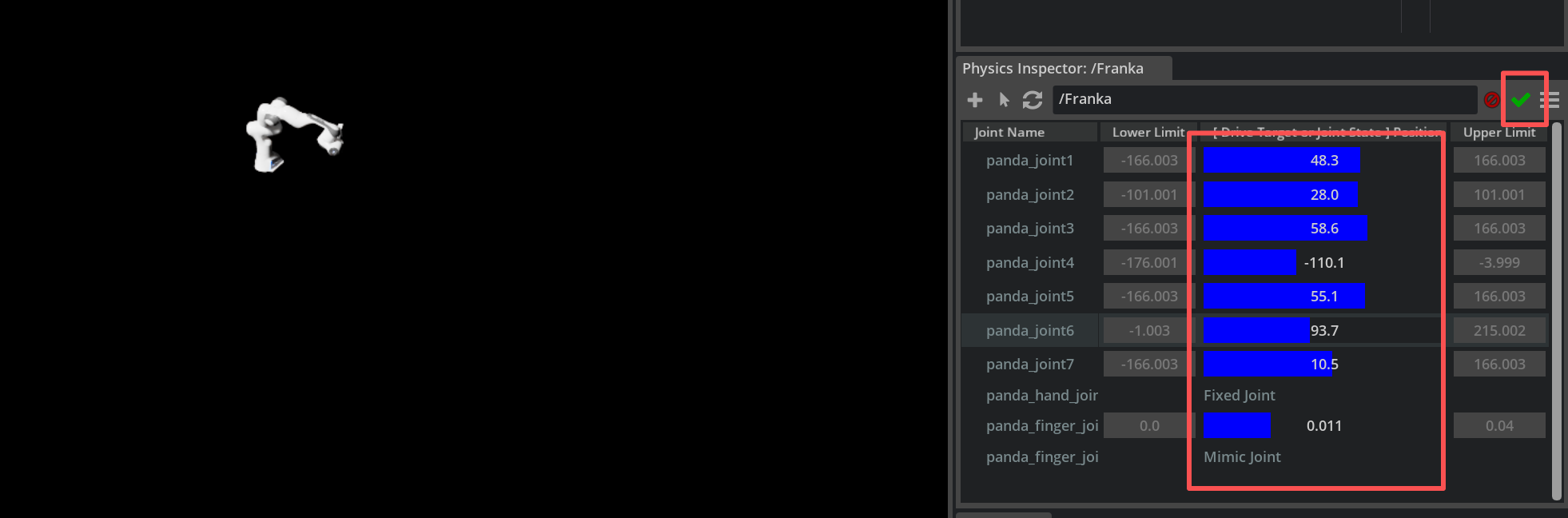
这些数都是能改的,改完打对勾生效。
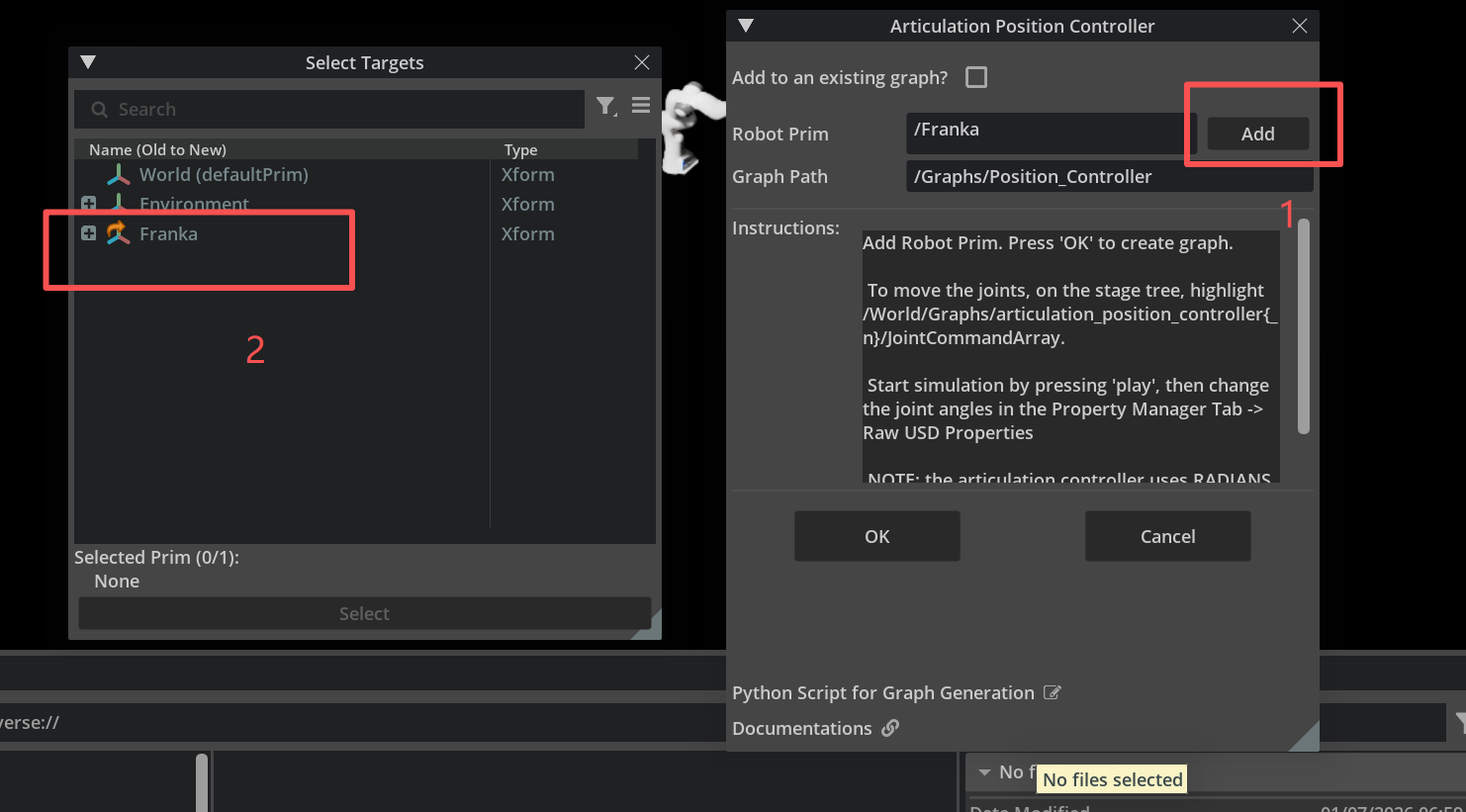
Tools > Robotics > Omnigraph Controllers > Joint Position
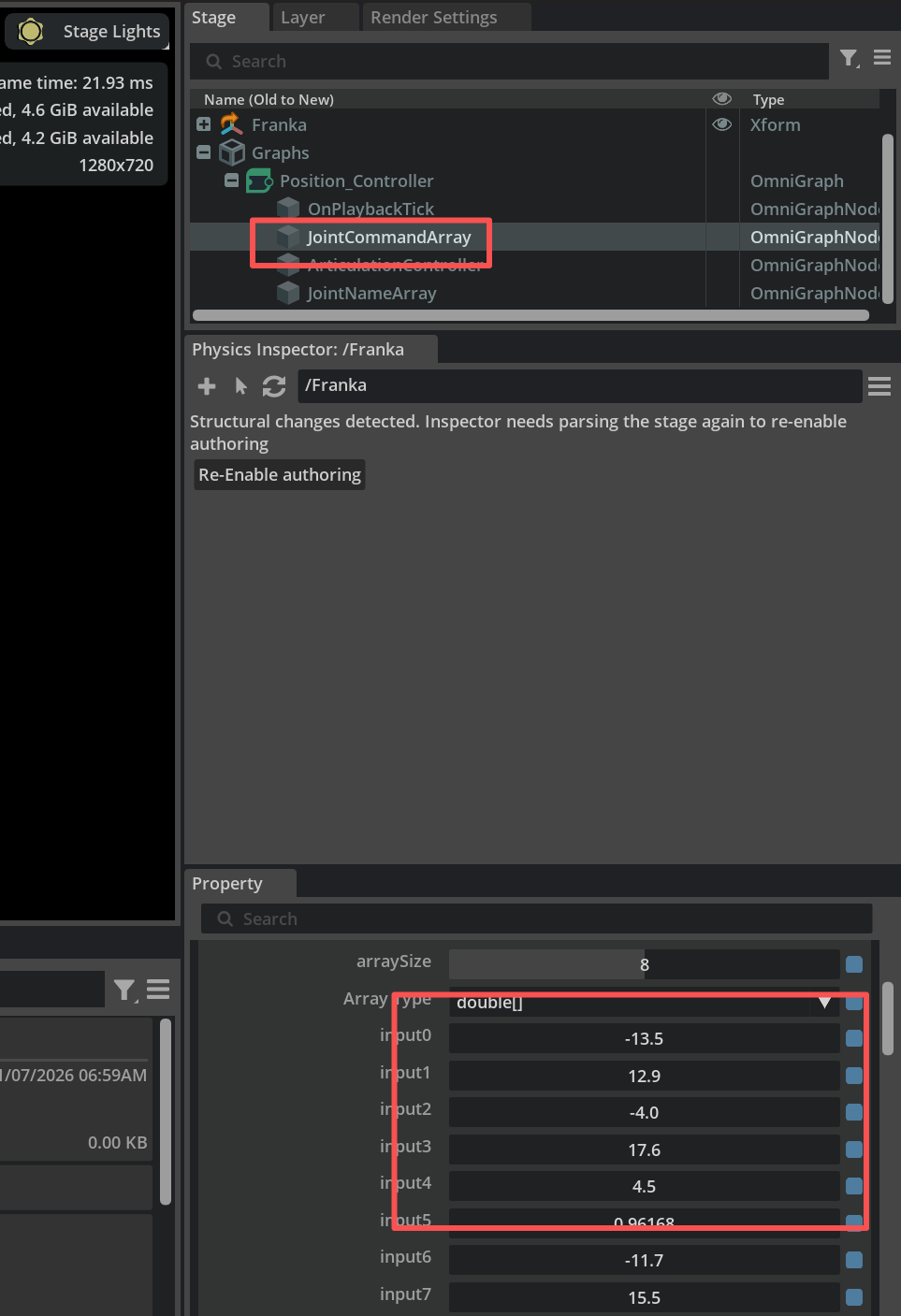
一阵瞎调,机械臂跟着动动动
Create > Robots > Franka Emika Panda Arm
Tools > Physics > Physics Inspector
啥也没有
按这个点
我去,这已经覆盖我一个周末的进度了。
这些数都是能改的,改完打对勾生效。
Tools > Robotics > Omnigraph Controllers > Joint Position
一阵瞎调,机械臂跟着动动动